The core of the Xinetics Deformable Mirror Device. More...
#include <XineticsCoreDevice.h>
Public Member Functions | |
| XineticsCoreDevice (const Nice::JointPtr &_config) | |
| virtual | ~XineticsCoreDevice () |
| virtual void | open () |
| open device More... | |
| virtual void | close () |
| close device More... | |
| virtual void | version () |
| version More... | |
| virtual void | init (Basda::DeviceAsync &=s_async) |
| init the device More... | |
| virtual void | deinit (Basda::DeviceAsync &=s_async) |
| deinit the device More... | |
| virtual bool | setActuators (Nice::SeqInt &_actuatorCmd) |
| Calculate voltages (applying corrections like nonliearities) and send the to the refl memory. If the voltages exceed thresholds set by the configuration, the frame is skipped. More... | |
| virtual void | getActCommands (Nice::SeqInt &_command) const |
| Convert the most recently calculated voltages back to their integer values. This is basically the inverse of calcActVoltages() and assumes that m_skipFrame=false, which means it supposes that the most recently calculated voltages have not been rejected by the various threshold checks. More... | |
| virtual Nice::SeqInt | getExceededNeighborActThreshold () |
| virtual Nice::SeqInt | getExceededActLimits () |
| virtual void | resetActuators () |
| Sets all actuators to actuator command zero. More... | |
| virtual void | resetActuators (const Nice::SeqFloat &_currentPos) |
| virtual void | handleXineticsEvents (uint32_t _timeout)=0 |
| virtual dspState_t | getDSPState () |
| virtual bool | getDSPError () |
| virtual Nice::SeqI16 | getFlatPatters () |
| XineticsCoreDevice (const Nice::JointPtr &_config) | |
| virtual | ~XineticsCoreDevice () |
| virtual void | open () |
| open device More... | |
| virtual void | close () |
| close device More... | |
| virtual void | version () |
| version More... | |
| virtual void | init (Basda::DeviceAsync &=s_async) |
| init the device More... | |
| virtual void | deinit (Basda::DeviceAsync &=s_async) |
| deinit the device More... | |
| virtual bool | setActuators (Nice::SeqInt &_actuatorCmd) |
| virtual void | getActCommands (Nice::SeqInt &_command) const |
| virtual Nice::SeqInt | getExceededNeighborActThreshold () |
| virtual Nice::SeqInt | getExceededActLimits () |
| virtual void | resetActuators () |
| Sets all actuators to actuator command zero. More... | |
| virtual void | resetActuators (const Nice::SeqFloat &_currentPos) |
| virtual void | handleXineticsEvents (uint32_t _timeout)=0 |
| virtual dspState_t | getDSPState () |
| virtual bool | getDSPError () |
| virtual Nice::SeqI16 | getFlatPatters () |
| XineticsCoreDevice (const Nice::JointPtr &_config) | |
| virtual | ~XineticsCoreDevice () |
| virtual void | open () |
| open device More... | |
| virtual void | close () |
| close device More... | |
| virtual void | version () |
| version More... | |
| virtual void | init (Basda::DeviceAsync &=s_async) |
| init the device More... | |
| virtual void | deinit (Basda::DeviceAsync &=s_async) |
| deinit the device More... | |
| virtual bool | setActuators (Nice::SeqInt &_actuatorCmd) |
| virtual void | getActCommands (Nice::SeqInt &_command) const |
| virtual Nice::SeqInt | getExceededNeighborActThreshold () |
| virtual Nice::SeqInt | getExceededActLimits () |
| virtual void | resetActuators () |
| Sets all actuators to actuator command zero. More... | |
| virtual void | resetActuators (const Nice::SeqFloat &_currentPos) |
| virtual void | handleXineticsEvents (uint32_t _timeout)=0 |
| virtual dspState_t | getDSPState () |
| virtual bool | getDSPError () |
| virtual Nice::SeqI16 | getFlatPatters () |
 Public Member Functions inherited from Basda::Device Public Member Functions inherited from Basda::Device | |
| Device (const Nice::JointPtr &_config) | |
| constructor. This is an elementary (lazy) action which stores the name and gets configuration. More... | |
| virtual | ~Device () |
| destructor Does nothing More... | |
| virtual void | setConfig (const Nice::JointPtr &_config) |
| init with config tree ptr More... | |
| Nice::JointPtr & | config () |
| retrieve the property tree More... | |
| std::string & | name () |
| retrieve the name set at ctor time. More... | |
| virtual void | reset (DeviceAsync &=s_async)=0 |
| reset the device More... | |
| virtual void | activate (DeviceAsync &=s_async)=0 |
| activate the device More... | |
| virtual void | deactivate (DeviceAsync &=s_async)=0 |
| deactivate the device More... | |
| Device (const Nice::JointPtr &_config) | |
| constructor. This is an elementary (lazy) action which stores the name and gets configuration. More... | |
| virtual | ~Device () |
| destructor Does nothing More... | |
| virtual void | setConfig (const Nice::JointPtr &_config) |
| init with config tree ptr More... | |
| Nice::JointPtr & | config () |
| retrieve the property tree More... | |
| std::string & | name () |
| retrieve the name set at ctor time. More... | |
| virtual void | reset (DeviceAsync &=s_async)=0 |
| reset the device More... | |
| virtual void | activate (DeviceAsync &=s_async)=0 |
| activate the device More... | |
| virtual void | deactivate (DeviceAsync &=s_async)=0 |
| deactivate the device More... | |
Protected Member Functions | |
| void | calcActVoltages (const Nice::SeqInt &_command) |
| Calculate actuator voltages plus sanity check. More... | |
| virtual void | applyActVoltages ()=0 |
| Send calculated DAC values to the Xinetics Electronics. More... | |
| void | addProperties () |
| void | updateProperties () |
| void | calcActVoltages (const Nice::SeqInt &_command) |
| Calculate actuator voltages plus sanity check. More... | |
| virtual void | applyActVoltages ()=0 |
| Send calculated DAC values to the Xinetics Electronics. More... | |
| void | addProperties () |
| void | updateProperties () |
| void | calcActVoltages (const Nice::SeqInt &_command) |
| Calculate actuator voltages plus sanity check. More... | |
| virtual void | applyActVoltages ()=0 |
| Send calculated DAC values to the Xinetics Electronics. More... | |
| void | addProperties () |
| void | updateProperties () |
Protected Attributes | |
| Laos::FitsVector< Nice::I16 > | m_actFlatPattern |
| Laos::FitsVector< double > | m_actSensitivityPattern |
| Laos::FitsVector< double > | m_actNonlinearityPattern |
| double | m_actCommonSensitivity |
| bool | m_correctFlatness |
| bool | m_correctSensitivity |
| bool | m_correctNonlinearity |
| Nice::SeqInt | m_exceededNeighborActThreshold |
| Nice::SeqInt | m_exceededActLimits |
| Laos::FitsVector< Nice::I16 > | m_NeighborMap |
| unsigned int | m_NeighborActThreshold |
| long | m_temporalDistanceThreshold |
| unsigned short | m_actVoltageArray [actVoltageArraySize] |
| unsigned short * | m_actVoltagePtr [numberOfXineticsActuators] |
| long | m_integratedActVoltage |
| long | m_frameCounter |
| long | m_skippedFrameCounter |
| bool | m_skipFrame |
| bool | m_isFlat |
| std::string | m_deviceFile |
| Laos::dspState_t | m_dspState |
| std::map< dspState_t, std::string > | m_dspStatename |
| bool | m_dspError |
| bool | m_fiberLink |
| Protected Attributes inherited from Basda::Device | |
| Nice::JointPtr | m_config |
| Nice::JointPtr | m_cfg |
| Nice::JointPtr | m_var |
| std::string | m_name |
Additional Inherited Members | |
| Static Public Attributes inherited from Basda::Device | |
| static DeviceAsyncImpl | s_async |
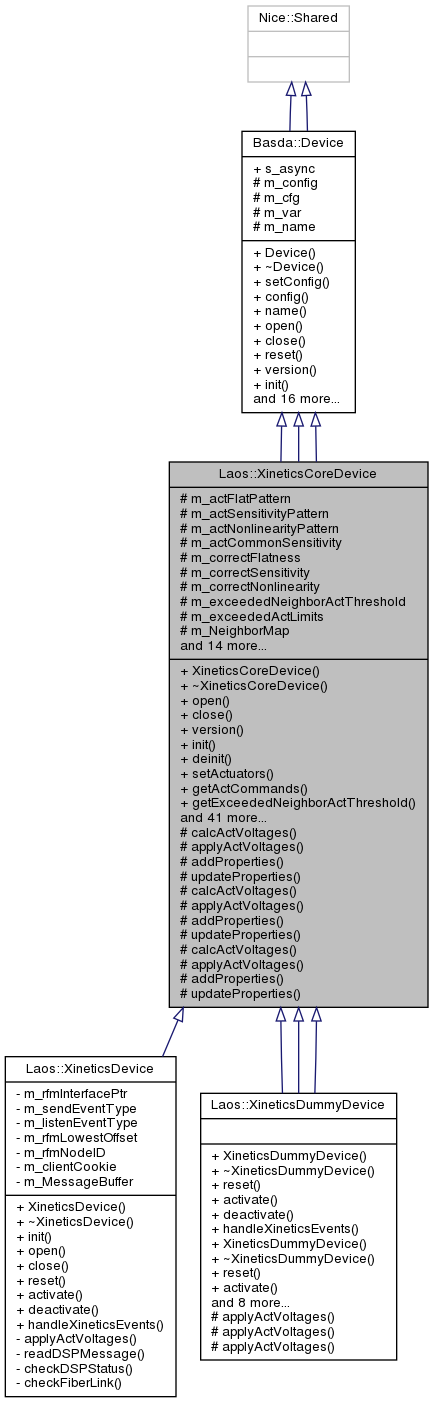
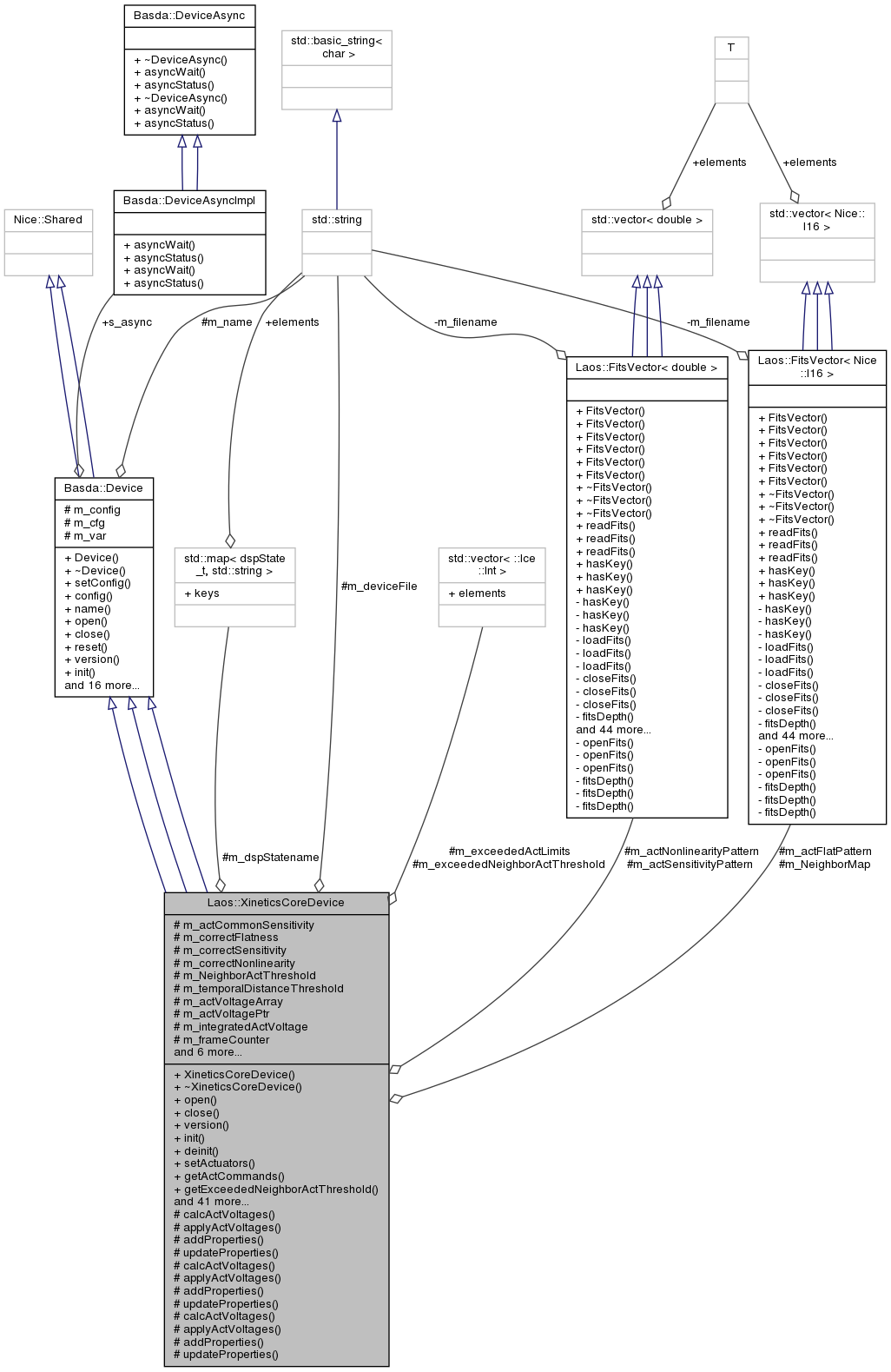
Detailed Description
The core of the Xinetics Deformable Mirror Device.
Its main purposes
- Actuator handling
- Interface for setting actuator positions
- the handling of actuator voltages (offsetting, sensitivity and linearization)
- sanity checking of neighbor values
- sanity checking of temporal distance (inter-frame piston)
- Control of the DM Electronics
- Command interface for operation mode
- Status monitor
- Configuration Tree:
- The following parameters are expected to be in the Device CFG tree during initialization:
- Parameters
-
CFG.ACT.FLATPATTERN:String Fits file with actator flat pattern CFG.ACT.SENSITIVITYPATTERN:String Fits file with normalized actator sensitivity pattern (will be multiplied with COMMONSENSITIVITY) CFG.ACT.NONLINEARITYPATTERN:String Fits file with actator nonlinearity pattern CFG.ACT.COMMONSENSITIVITY:Double Mean Sensitivity of Actuators. May in the future be a function of temperature CFG.ACT.NEIGHBORMAP:String Fits file containing for each Actuator the number of each neighboring actuator to the right and down CFG.ACT.NEIGHBOR_THRES:U16 Maximum difference between neighbors (Actuator command, not DAC values!) CFG.ACT.TEMPORALDISTANCE_THRES:U32 Maximum change in the integrated Actuator command values (Piston) between two frames. CFG.RFM.DEVFILE:String RFM Device File
Constructor & Destructor Documentation
◆ XineticsCoreDevice() [1/3]
| Laos::XineticsCoreDevice::XineticsCoreDevice | ( | const Nice::JointPtr & | _config | ) |
◆ ~XineticsCoreDevice() [1/3]
|
virtual |
◆ XineticsCoreDevice() [2/3]
| Laos::XineticsCoreDevice::XineticsCoreDevice | ( | const Nice::JointPtr & | _config | ) |
◆ ~XineticsCoreDevice() [2/3]
|
virtual |
◆ XineticsCoreDevice() [3/3]
| Laos::XineticsCoreDevice::XineticsCoreDevice | ( | const Nice::JointPtr & | _config | ) |
◆ ~XineticsCoreDevice() [3/3]
|
virtual |
Member Function Documentation
◆ addProperties() [1/3]
|
protected |
◆ addProperties() [2/3]
|
protected |
◆ addProperties() [3/3]
|
protected |
◆ applyActVoltages() [1/3]
|
protectedpure virtual |
Send calculated DAC values to the Xinetics Electronics.
- Returns
- void
Implemented in Laos::XineticsDevice, Laos::XineticsDummyDevice, Laos::XineticsDummyDevice, and Laos::XineticsDummyDevice.
◆ applyActVoltages() [2/3]
|
protectedpure virtual |
Send calculated DAC values to the Xinetics Electronics.
- Returns
- void
Implemented in Laos::XineticsDevice, Laos::XineticsDummyDevice, Laos::XineticsDummyDevice, and Laos::XineticsDummyDevice.
◆ applyActVoltages() [3/3]
|
protectedpure virtual |
Send calculated DAC values to the Xinetics Electronics.
- Returns
- void
Implemented in Laos::XineticsDevice, Laos::XineticsDummyDevice, Laos::XineticsDummyDevice, and Laos::XineticsDummyDevice.
◆ calcActVoltages() [1/3]
|
protected |
Calculate actuator voltages plus sanity check.
- Parameters
-
_command vector of actuator commands.
- Returns
- void
◆ calcActVoltages() [2/3]
|
protected |
Calculate actuator voltages plus sanity check.
- Parameters
-
_command vector of actuator commands.
- Returns
- void
◆ calcActVoltages() [3/3]
|
protected |
Calculate actuator voltages plus sanity check.
- Parameters
-
_command vector of actuator commands.
- Returns
- void
◆ close() [1/3]
|
virtual |
◆ close() [2/3]
|
virtual |
◆ close() [3/3]
|
virtual |
◆ deinit() [1/3]
|
virtual |
deinit the device
Implements Basda::Device.
◆ deinit() [2/3]
|
virtual |
deinit the device
Implements Basda::Device.
◆ deinit() [3/3]
|
virtual |
deinit the device
Implements Basda::Device.
◆ getActCommands() [1/3]
|
virtual |
◆ getActCommands() [2/3]
|
virtual |
◆ getActCommands() [3/3]
|
virtual |
Convert the most recently calculated voltages back to their integer values. This is basically the inverse of calcActVoltages() and assumes that m_skipFrame=false, which means it supposes that the most recently calculated voltages have not been rejected by the various threshold checks.
- Parameters
-
[out] _command On output the values equivalent to the parameter vector of the most recent applyActVoltages().
- Since
- 2018-11-06
◆ getDSPError() [1/3]
|
virtual |
◆ getDSPError() [2/3]
|
virtual |
◆ getDSPError() [3/3]
|
virtual |
◆ getDSPState() [1/3]
|
virtual |
◆ getDSPState() [2/3]
|
virtual |
◆ getDSPState() [3/3]
|
virtual |
◆ getExceededActLimits() [1/3]
|
virtual |
◆ getExceededActLimits() [2/3]
|
virtual |
◆ getExceededActLimits() [3/3]
|
virtual |
◆ getExceededNeighborActThreshold() [1/3]
|
virtual |
◆ getExceededNeighborActThreshold() [2/3]
|
virtual |
◆ getExceededNeighborActThreshold() [3/3]
|
virtual |
◆ getFlatPatters() [1/3]
|
virtual |
◆ getFlatPatters() [2/3]
|
virtual |
◆ getFlatPatters() [3/3]
|
virtual |
◆ handleXineticsEvents() [1/3]
|
pure virtual |
Implemented in Laos::XineticsDevice, Laos::XineticsDummyDevice, Laos::XineticsDummyDevice, and Laos::XineticsDummyDevice.
◆ handleXineticsEvents() [2/3]
|
pure virtual |
Implemented in Laos::XineticsDevice, Laos::XineticsDummyDevice, Laos::XineticsDummyDevice, and Laos::XineticsDummyDevice.
◆ handleXineticsEvents() [3/3]
|
pure virtual |
Implemented in Laos::XineticsDevice, Laos::XineticsDummyDevice, Laos::XineticsDummyDevice, and Laos::XineticsDummyDevice.
◆ init() [1/3]
|
virtual |
◆ init() [2/3]
|
virtual |
◆ init() [3/3]
|
virtual |
◆ open() [1/3]
|
virtual |
◆ open() [2/3]
|
virtual |
◆ open() [3/3]
|
virtual |
◆ resetActuators() [1/6]
|
virtual |
Sets all actuators to actuator command zero.
- Returns
- void
◆ resetActuators() [2/6]
|
virtual |
Sets all actuators to actuator command zero.
- Returns
- void
◆ resetActuators() [3/6]
|
virtual |
Sets all actuators to actuator command zero.
- Returns
- void
◆ resetActuators() [4/6]
|
virtual |
◆ resetActuators() [5/6]
|
virtual |
◆ resetActuators() [6/6]
|
virtual |
◆ setActuators() [1/3]
|
virtual |
Calculate voltages (applying corrections like nonliearities) and send the to the refl memory. If the voltages exceed thresholds set by the configuration, the frame is skipped.
- Parameters
-
_actuatorCmd The vector of the (linear) commands.
◆ setActuators() [2/3]
|
virtual |
◆ setActuators() [3/3]
|
virtual |
◆ updateProperties() [1/3]
|
protected |
◆ updateProperties() [2/3]
|
protected |
◆ updateProperties() [3/3]
|
protected |
◆ version() [1/3]
|
virtual |
version
Implements Basda::Device.
◆ version() [2/3]
|
virtual |
version
Implements Basda::Device.
◆ version() [3/3]
|
virtual |
version
Implements Basda::Device.
Member Data Documentation
◆ m_actCommonSensitivity
|
protected |
◆ m_actFlatPattern
|
protected |
◆ m_actNonlinearityPattern
|
protected |
◆ m_actSensitivityPattern
|
protected |
◆ m_actVoltageArray
|
protected |
◆ m_actVoltagePtr
|
protected |
◆ m_correctFlatness
|
protected |
◆ m_correctNonlinearity
|
protected |
◆ m_correctSensitivity
|
protected |
◆ m_deviceFile
|
protected |
◆ m_dspError
|
protected |
◆ m_dspState
|
protected |
◆ m_dspStatename
|
protected |
◆ m_exceededActLimits
|
protected |
◆ m_exceededNeighborActThreshold
|
protected |
◆ m_fiberLink
|
protected |
◆ m_frameCounter
|
protected |
◆ m_integratedActVoltage
|
protected |
◆ m_isFlat
|
protected |
◆ m_NeighborActThreshold
|
protected |
◆ m_NeighborMap
|
protected |
◆ m_skipFrame
|
protected |
◆ m_skippedFrameCounter
|
protected |
◆ m_temporalDistanceThreshold
|
protected |
The documentation for this class was generated from the following files:
- /home/nirva/insroot/include/Laos/Wfc/XineticsCoreDevice.h
- ln/laos-wfc/doc/include/XineticsCoreDevice.cc
