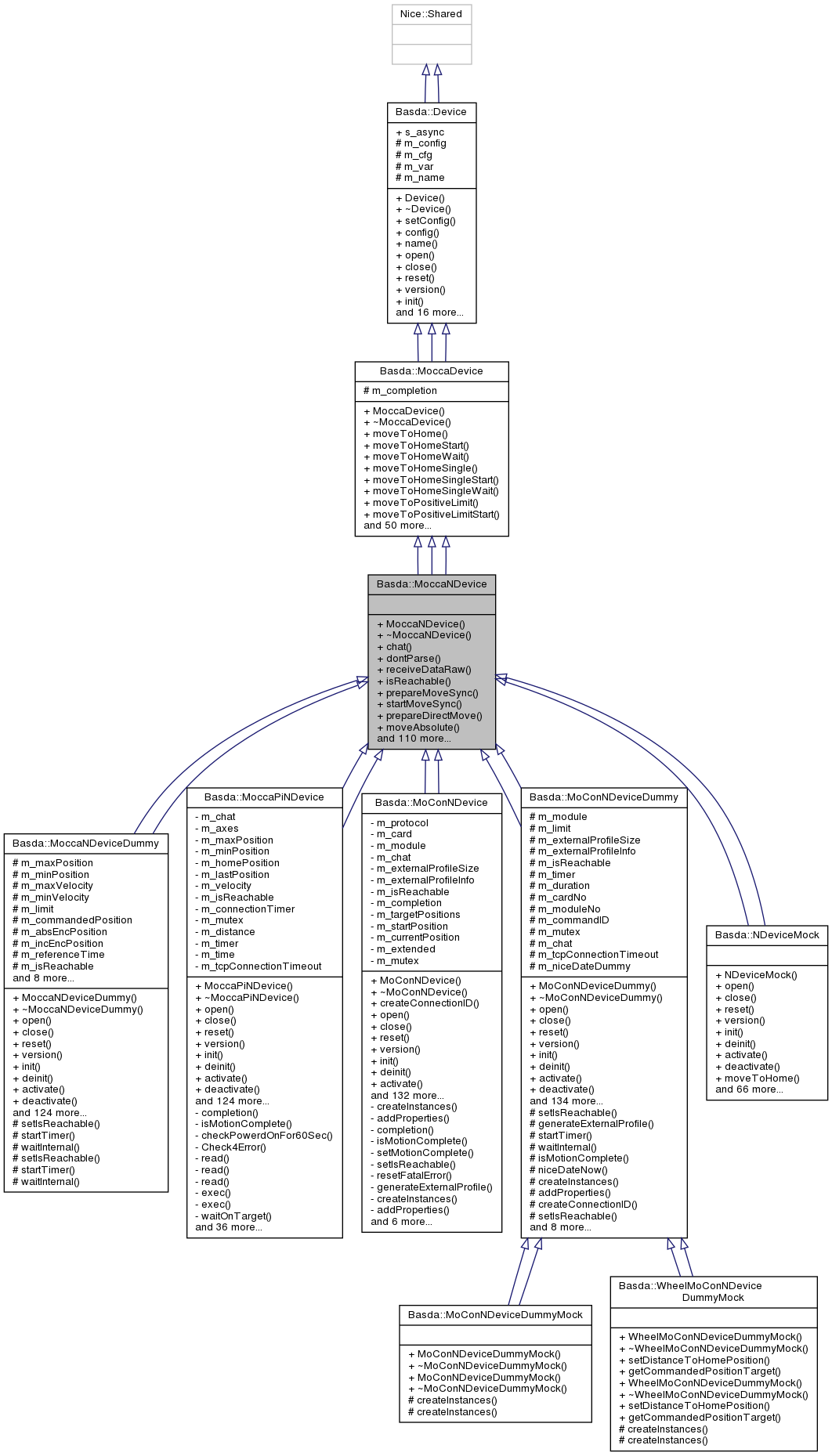
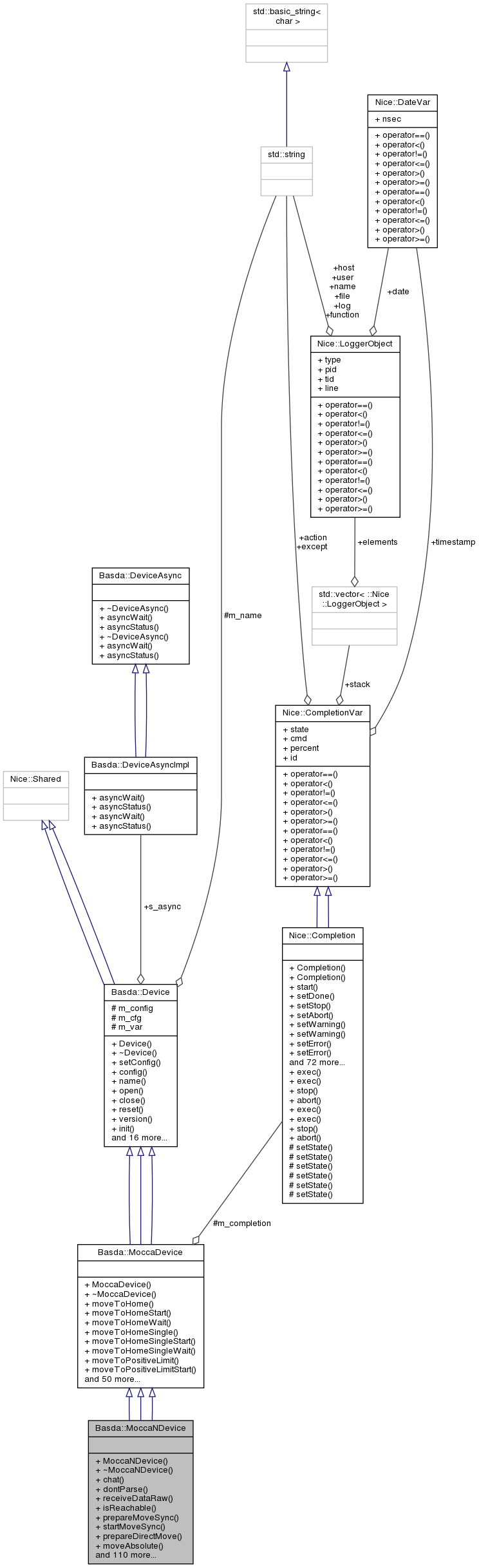
This is a specialization of the motor device class. More...
#include <NDevice.h>
Public Member Functions | |
| MoccaNDevice (const Nice::JointPtr &_config) | |
| Constructor. More... | |
| virtual | ~MoccaNDevice () |
| Constructor. More... | |
| virtual void | chat (std::string _cardNo, std::string _commandID, std::string _moduleNo, std::string _selectID, std::string _parameter, std::string _numberOfLines, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| This method send the command string to the electronic. More... | |
| virtual std::string | dontParse (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| This method was requested by Lorenzo Busoni (lbusoni@arcetri.astro.it 02.03.2012) More... | |
| virtual std::string | receiveDataRaw (std::string _cardNo, std::string _commandID, std::string _moduleNo, std::string _numberOfLines, DeviceAsync &=s_async)=0 |
| virtual bool | isReachable ()=0 |
| virtual void | prepareMoveSync (Nice::BitSet _motors)=0 |
| virtual void | startMoveSync ()=0 |
| virtual void | prepareDirectMove (const Nice::NPoint &_acceleration, const Nice::NPoint &_velocity, const Nice::NPoint &_deceleration)=0 |
| This method setup the acceleration anv velocity for a direct point to point move. More... | |
| virtual void | moveAbsolute (const Nice::NPoint &_positions, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| All motors of a device move to the absolute position. More... | |
| virtual void | moveAbsoluteStart (const Nice::NPoint &_positions, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveAbsoluteWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveRelative (const Nice::NPoint &_positions, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| All motors of a device move to the relative position. More... | |
| virtual void | moveRelativeStart (const Nice::NPoint &_positions, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveRelativeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual Nice::NPoint | getPosition ()=0 |
| This method is deprecated and will be exchanged with getDeviceencoderPosition() More... | |
| virtual Nice::NPoint | getDeviceEncoderPosition ()=0 |
| Returns the current device internal position encoder of all motors. More... | |
| virtual Nice::NPoint | getAbsoluteEncoderPosition ()=0 |
| Returns the current absolute encoder positions of all motors. More... | |
| virtual Nice::NPoint | getIncrementalEncoderPosition ()=0 |
| Returns the current incremental encoder positions of all motors. More... | |
| virtual void | setPosition (const Nice::NPoint &_position)=0 |
| Change the absolute position of all motors. More... | |
| virtual Nice::NPoint | getVelocity ()=0 |
| Returns the current velocity of all motors. More... | |
| virtual Nice::SeqSeqDouble | getBasicSettings ()=0 |
| Returns the basic settings of all motors. More... | |
| virtual void | setVelocitySetting (const Nice::NPoint &_velocity)=0 |
| Set the velocity configuration parameter of all motors. More... | |
| virtual void | setAccelerationSetting (const Nice::NPoint &_acceleration)=0 |
| Set the acceleration configuration parameter of all motors. More... | |
| virtual void | setDecelerationSetting (const Nice::NPoint &_deceleration)=0 |
| Set the deceleration configuration parameter of all motors. More... | |
| virtual void | setJerkSetting (const Nice::NPoint &_jerk)=0 |
| Set the jerk configuration parameter of all motors. More... | |
| virtual bool | isAtLimit (Nice::NPoint &_limit)=0 |
| Returns the current limit switch state of all motors in a vector. More... | |
| virtual bool | isAtHome (Nice::BitSet &_atHome)=0 |
| This method indicate whether the motor is at the home position. More... | |
| virtual bool | isMoving (Nice::BitSet &_motion)=0 |
| Returns the motion flag of all motors in a vector. More... | |
| virtual void | setLinkTimeout (Nice::Time _tcpConnectionTimeout)=0 |
| virtual Nice::SeqTime | getLinkTimeout ()=0 |
| virtual Nice::NPoint | getReferenceTime ()=0 |
| virtual Nice::NPoint | getCurrentTime ()=0 |
| virtual void | startExternalProfile (const Nice::Date &_date, const Nice::NPoint &_positionSequence, unsigned int _frequency, unsigned int _samplesPerSegment, unsigned int _faultTolerance, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | changeExternalProfile (const Nice::Date &_date, const Nice::NPoint &_positionSequence)=0 |
| virtual void | prepareExternalProfile (const Nice::SeqSeqInt &_segmentsX, const Nice::SeqSeqInt &_segmentsY, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | startExternalProfile (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual Nice::SeqBitSet | getPositionSwitchStatus ()=0 |
| The external profile will be configured and the external profile will uploaded to the MoCon. More... | |
| virtual void | dumpStatusInformation (Basda::DeviceAsync &_asynch, bool _compareParameter=false)=0 |
| virtual void | setCollision (Nice::SeqPoint _collisions)=0 |
| MoccaNDevice (const Nice::JointPtr &_config) | |
| Constructor. More... | |
| virtual | ~MoccaNDevice () |
| Constructor. More... | |
| virtual void | chat (std::string _cardNo, std::string _commandID, std::string _moduleNo, std::string _selectID, std::string _parameter, std::string _numberOfLines, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| This method send the command string to the electronic. More... | |
| virtual std::string | dontParse (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| This method was requested by Lorenzo Busoni (lbusoni@arcetri.astro.it 02.03.2012) More... | |
| virtual std::string | receiveDataRaw (std::string _cardNo, std::string _commandID, std::string _moduleNo, std::string _numberOfLines, DeviceAsync &=s_async)=0 |
| virtual bool | isReachable ()=0 |
| virtual void | prepareMoveSync (Nice::BitSet _motors)=0 |
| virtual void | startMoveSync ()=0 |
| virtual void | prepareDirectMove (const Nice::NPoint &_acceleration, const Nice::NPoint &_velocity, const Nice::NPoint &_deceleration)=0 |
| This method setup the acceleration anv velocity for a direct point to point move. More... | |
| virtual void | moveAbsolute (const Nice::NPoint &_positions, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| All motors of a device move to the absolute position. More... | |
| virtual void | moveAbsoluteStart (const Nice::NPoint &_positions, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveAbsoluteWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveRelative (const Nice::NPoint &_positions, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| All motors of a device move to the relative position. More... | |
| virtual void | moveRelativeStart (const Nice::NPoint &_positions, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveRelativeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual Nice::NPoint | getPosition ()=0 |
| This method is deprecated and will be exchanged with getDeviceencoderPosition() More... | |
| virtual Nice::NPoint | getDeviceEncoderPosition ()=0 |
| Returns the current device internal position encoder of all motors. More... | |
| virtual Nice::NPoint | getAbsoluteEncoderPosition ()=0 |
| Returns the current absolute encoder positions of all motors. More... | |
| virtual Nice::NPoint | getIncrementalEncoderPosition ()=0 |
| Returns the current incremental encoder positions of all motors. More... | |
| virtual void | setPosition (const Nice::NPoint &_position)=0 |
| Change the absolute position of all motors. More... | |
| virtual Nice::NPoint | getVelocity ()=0 |
| Returns the current velocity of all motors. More... | |
| virtual Nice::SeqSeqDouble | getBasicSettings ()=0 |
| Returns the basic settings of all motors. More... | |
| virtual void | setVelocitySetting (const Nice::NPoint &_velocity)=0 |
| Set the velocity configuration parameter of all motors. More... | |
| virtual void | setAccelerationSetting (const Nice::NPoint &_acceleration)=0 |
| Set the acceleration configuration parameter of all motors. More... | |
| virtual void | setDecelerationSetting (const Nice::NPoint &_deceleration)=0 |
| Set the deceleration configuration parameter of all motors. More... | |
| virtual void | setJerkSetting (const Nice::NPoint &_jerk)=0 |
| Set the jerk configuration parameter of all motors. More... | |
| virtual bool | isAtLimit (Nice::NPoint &_limit)=0 |
| Returns the current limit switch state of all motors in a vector. More... | |
| virtual bool | isAtHome (Nice::BitSet &_atHome)=0 |
| This method indicate whether the motor is at the home position. More... | |
| virtual bool | isMoving (Nice::BitSet &_motion)=0 |
| Returns the motion flag of all motors in a vector. More... | |
| virtual void | setLinkTimeout (Nice::Time _tcpConnectionTimeout)=0 |
| virtual Nice::SeqTime | getLinkTimeout ()=0 |
| virtual Nice::NPoint | getReferenceTime ()=0 |
| virtual Nice::NPoint | getCurrentTime ()=0 |
| virtual void | startExternalProfile (const Nice::Date &_date, const Nice::NPoint &_positionSequence, unsigned int _frequency, unsigned int _samplesPerSegment, unsigned int _faultTolerance, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | changeExternalProfile (const Nice::Date &_date, const Nice::NPoint &_positionSequence)=0 |
| virtual void | prepareExternalProfile (const Nice::SeqSeqInt &_segmentsX, const Nice::SeqSeqInt &_segmentsY, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | startExternalProfile (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual Nice::SeqBitSet | getPositionSwitchStatus ()=0 |
| The external profile will be configured and the external profile will uploaded to the MoCon. More... | |
| virtual void | dumpStatusInformation (Basda::DeviceAsync &_asynch, bool _compareParameter=false)=0 |
| virtual void | setCollision (Nice::SeqPoint _collisions)=0 |
| MoccaNDevice (const Nice::JointPtr &_config) | |
| Constructor. More... | |
| virtual | ~MoccaNDevice () |
| Constructor. More... | |
| virtual void | chat (std::string _cardNo, std::string _commandID, std::string _moduleNo, std::string _selectID, std::string _parameter, std::string _numberOfLines, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| This method send the command string to the electronic. More... | |
| virtual std::string | dontParse (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| This method was requested by Lorenzo Busoni (lbusoni@arcetri.astro.it 02.03.2012) More... | |
| virtual std::string | receiveDataRaw (std::string _cardNo, std::string _commandID, std::string _moduleNo, std::string _numberOfLines, DeviceAsync &=s_async)=0 |
| virtual bool | isReachable ()=0 |
| virtual void | prepareMoveSync (Nice::BitSet _motors)=0 |
| virtual void | startMoveSync ()=0 |
| virtual void | prepareDirectMove (const Nice::NPoint &_acceleration, const Nice::NPoint &_velocity, const Nice::NPoint &_deceleration)=0 |
| This method setup the acceleration anv velocity for a direct point to point move. More... | |
| virtual void | moveAbsolute (const Nice::NPoint &_positions, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| All motors of a device move to the absolute position. More... | |
| virtual void | moveAbsoluteStart (const Nice::NPoint &_positions, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveAbsoluteWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveRelative (const Nice::NPoint &_positions, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| All motors of a device move to the relative position. More... | |
| virtual void | moveRelativeStart (const Nice::NPoint &_positions, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveRelativeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual Nice::NPoint | getPosition ()=0 |
| This method is deprecated and will be exchanged with getDeviceencoderPosition() More... | |
| virtual Nice::NPoint | getDeviceEncoderPosition ()=0 |
| Returns the current device internal position encoder of all motors. More... | |
| virtual Nice::NPoint | getAbsoluteEncoderPosition ()=0 |
| Returns the current absolute encoder positions of all motors. More... | |
| virtual Nice::NPoint | getIncrementalEncoderPosition ()=0 |
| Returns the current incremental encoder positions of all motors. More... | |
| virtual void | setPosition (const Nice::NPoint &_position)=0 |
| Change the absolute position of all motors. More... | |
| virtual Nice::NPoint | getVelocity ()=0 |
| Returns the current velocity of all motors. More... | |
| virtual Nice::SeqSeqDouble | getBasicSettings ()=0 |
| Returns the basic settings of all motors. More... | |
| virtual void | setVelocitySetting (const Nice::NPoint &_velocity)=0 |
| Set the velocity configuration parameter of all motors. More... | |
| virtual void | setAccelerationSetting (const Nice::NPoint &_acceleration)=0 |
| Set the acceleration configuration parameter of all motors. More... | |
| virtual void | setDecelerationSetting (const Nice::NPoint &_deceleration)=0 |
| Set the deceleration configuration parameter of all motors. More... | |
| virtual void | setJerkSetting (const Nice::NPoint &_jerk)=0 |
| Set the jerk configuration parameter of all motors. More... | |
| virtual bool | isAtLimit (Nice::NPoint &_limit)=0 |
| Returns the current limit switch state of all motors in a vector. More... | |
| virtual bool | isAtHome (Nice::BitSet &_atHome)=0 |
| This method indicate whether the motor is at the home position. More... | |
| virtual bool | isMoving (Nice::BitSet &_motion)=0 |
| Returns the motion flag of all motors in a vector. More... | |
| virtual void | setLinkTimeout (Nice::Time _tcpConnectionTimeout)=0 |
| virtual Nice::SeqTime | getLinkTimeout ()=0 |
| virtual Nice::NPoint | getReferenceTime ()=0 |
| virtual Nice::NPoint | getCurrentTime ()=0 |
| virtual void | startExternalProfile (const Nice::Date &_date, const Nice::NPoint &_positionSequence, unsigned int _frequency, unsigned int _samplesPerSegment, unsigned int _faultTolerance, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | changeExternalProfile (const Nice::Date &_date, const Nice::NPoint &_positionSequence)=0 |
| virtual void | prepareExternalProfile (const Nice::SeqSeqInt &_segmentsX, const Nice::SeqSeqInt &_segmentsY, Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | startExternalProfile (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual Nice::SeqBitSet | getPositionSwitchStatus ()=0 |
| The external profile will be configured and the external profile will uploaded to the MoCon. More... | |
| virtual void | dumpStatusInformation (Basda::DeviceAsync &_asynch, bool _compareParameter=false)=0 |
| virtual void | setCollision (Nice::SeqPoint _collisions)=0 |
 Public Member Functions inherited from Basda::MoccaDevice Public Member Functions inherited from Basda::MoccaDevice | |
| MoccaDevice (const Nice::JointPtr &_config) | |
| Constructor. More... | |
| virtual | ~MoccaDevice () |
| virtual void | moveToHome (DeviceAsync &=s_async)=0 |
| All motors of a device move to the home position. More... | |
| virtual void | moveToHomeStart (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeSingle (const int _index, DeviceAsync &=s_async)=0 |
| virtual void | moveToHomeSingleStart (int _motor, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeSingleWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToPositiveLimit (DeviceAsync &=s_async)=0 |
| All motors of a device move to the positive limit switch. More... | |
| virtual void | moveToPositiveLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToPositiveLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToNegativeLimit (DeviceAsync &=s_async)=0 |
| All motors of a device move to the negative limit switch. More... | |
| virtual void | moveToNegativeLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToNegativeLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToLimit (const Nice::NPoint &_limits, DeviceAsync &=s_async)=0 |
| move all motors to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More... | |
| virtual void | moveToLimitStart (const Nice::NPoint &_limit, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToLimitWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | stop ()=0 |
| All motors of a device stop moving. More... | |
| virtual void | abort ()=0 |
| All motors of a device abort the current movement. More... | |
| virtual Nice::Completion | getProgress ()=0 |
| MoccaDevice (const Nice::JointPtr &_config) | |
| Constructor. More... | |
| virtual | ~MoccaDevice () |
| virtual void | moveToHome (DeviceAsync &=s_async)=0 |
| All motors of a device move to the home position. More... | |
| virtual void | moveToHomeStart (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeSingle (const int _index, DeviceAsync &=s_async)=0 |
| virtual void | moveToHomeSingleStart (int _motor, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeSingleWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToPositiveLimit (DeviceAsync &=s_async)=0 |
| All motors of a device move to the positive limit switch. More... | |
| virtual void | moveToPositiveLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToPositiveLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToNegativeLimit (DeviceAsync &=s_async)=0 |
| All motors of a device move to the negative limit switch. More... | |
| virtual void | moveToNegativeLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToNegativeLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToLimit (const Nice::NPoint &_limits, DeviceAsync &=s_async)=0 |
| move all motors to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More... | |
| virtual void | moveToLimitStart (const Nice::NPoint &_limit, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToLimitWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | stop ()=0 |
| All motors of a device stop moving. More... | |
| virtual void | abort ()=0 |
| All motors of a device abort the current movement. More... | |
| virtual Nice::Completion | getProgress ()=0 |
| MoccaDevice (const Nice::JointPtr &_config) | |
| Constructor. More... | |
| virtual | ~MoccaDevice () |
| virtual void | moveToHome (DeviceAsync &=s_async)=0 |
| All motors of a device move to the home position. More... | |
| virtual void | moveToHomeStart (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeSingle (const int _index, DeviceAsync &=s_async)=0 |
| virtual void | moveToHomeSingleStart (int _motor, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToHomeSingleWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToPositiveLimit (DeviceAsync &=s_async)=0 |
| All motors of a device move to the positive limit switch. More... | |
| virtual void | moveToPositiveLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToPositiveLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToNegativeLimit (DeviceAsync &=s_async)=0 |
| All motors of a device move to the negative limit switch. More... | |
| virtual void | moveToNegativeLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToNegativeLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| virtual void | moveToLimit (const Nice::NPoint &_limits, DeviceAsync &=s_async)=0 |
| move all motors to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More... | |
| virtual void | moveToLimitStart (const Nice::NPoint &_limit, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | moveToLimitWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| virtual void | stop ()=0 |
| All motors of a device stop moving. More... | |
| virtual void | abort ()=0 |
| All motors of a device abort the current movement. More... | |
| virtual Nice::Completion | getProgress ()=0 |
| Public Member Functions inherited from Basda::Device | |
| Device (const Nice::JointPtr &_config) | |
| constructor. This is an elementary (lazy) action which stores the name and gets configuration. More... | |
| virtual | ~Device () |
| destructor Does nothing More... | |
| virtual void | setConfig (const Nice::JointPtr &_config) |
| init with config tree ptr More... | |
| Nice::JointPtr & | config () |
| retrieve the property tree More... | |
| std::string & | name () |
| retrieve the name set at ctor time. More... | |
| virtual void | open ()=0 |
| open device More... | |
| virtual void | close ()=0 |
| close device More... | |
| virtual void | reset (DeviceAsync &=s_async)=0 |
| reset the device More... | |
| virtual void | version ()=0 |
| version More... | |
| virtual void | init (DeviceAsync &=s_async)=0 |
| init the device More... | |
| virtual void | deinit (DeviceAsync &=s_async)=0 |
| deinit the device More... | |
| virtual void | activate (DeviceAsync &=s_async)=0 |
| activate the device More... | |
| virtual void | deactivate (DeviceAsync &=s_async)=0 |
| deactivate the device More... | |
| Device (const Nice::JointPtr &_config) | |
| constructor. This is an elementary (lazy) action which stores the name and gets configuration. More... | |
| virtual | ~Device () |
| destructor Does nothing More... | |
| virtual void | setConfig (const Nice::JointPtr &_config) |
| init with config tree ptr More... | |
| Nice::JointPtr & | config () |
| retrieve the property tree More... | |
| std::string & | name () |
| retrieve the name set at ctor time. More... | |
| virtual void | open ()=0 |
| open device More... | |
| virtual void | close ()=0 |
| close device More... | |
| virtual void | reset (DeviceAsync &=s_async)=0 |
| reset the device More... | |
| virtual void | version ()=0 |
| version More... | |
| virtual void | init (DeviceAsync &=s_async)=0 |
| init the device More... | |
| virtual void | deinit (DeviceAsync &=s_async)=0 |
| deinit the device More... | |
| virtual void | activate (DeviceAsync &=s_async)=0 |
| activate the device More... | |
| virtual void | deactivate (DeviceAsync &=s_async)=0 |
| deactivate the device More... | |
Detailed Description
This is a specialization of the motor device class.
All MoCon devices need to inherit from that class and have to implement at least these methods.
- Version
- 09.06.23
- Date
- 2009.06.23
Constructor & Destructor Documentation
◆ MoccaNDevice() [1/3]
|
inline |
Constructor.
- Parameters
-
_config the root of the configuration tree
◆ ~MoccaNDevice() [1/3]
|
inlinevirtual |
Constructor.
◆ MoccaNDevice() [2/3]
|
inline |
Constructor.
- Parameters
-
_config the root of the configuration tree
◆ ~MoccaNDevice() [2/3]
|
inlinevirtual |
Constructor.
◆ MoccaNDevice() [3/3]
|
inline |
Constructor.
- Parameters
-
_config the root of the configuration tree
◆ ~MoccaNDevice() [3/3]
|
inlinevirtual |
Constructor.
Member Function Documentation
◆ changeExternalProfile() [1/3]
|
pure virtual |
◆ changeExternalProfile() [2/3]
|
pure virtual |
◆ changeExternalProfile() [3/3]
|
pure virtual |
◆ chat() [1/3]
|
pure virtual |
This method send the command string to the electronic.
This method is set to public due to requests from Lorenzo Busoni. BUT THE USER OF THIS METHOD TAKE OVER THE RESPONSIBILITY OF THE CORRECT ERROR HANDLING. THE DRIVER DOES NOT HAVE THE CONTROL OVER THAT DEVICE ANY MORE.
- Parameters
-
_commandID the command ID _selectID the sub command ID _cardNo the ID of the MPIA electronic card _moduleNo the ID of the device module _parameter the parameter as string _numberOfLines the number of lines that might be read
- See also
- dontParse
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ chat() [2/3]
|
pure virtual |
This method send the command string to the electronic.
This method is set to public due to requests from Lorenzo Busoni. BUT THE USER OF THIS METHOD TAKE OVER THE RESPONSIBILITY OF THE CORRECT ERROR HANDLING. THE DRIVER DOES NOT HAVE THE CONTROL OVER THAT DEVICE ANY MORE.
- Parameters
-
_commandID the command ID _selectID the sub command ID _cardNo the ID of the MPIA electronic card _moduleNo the ID of the device module _parameter the parameter as string _numberOfLines the number of lines that might be read
- See also
- dontParse
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ chat() [3/3]
|
pure virtual |
This method send the command string to the electronic.
This method is set to public due to requests from Lorenzo Busoni. BUT THE USER OF THIS METHOD TAKE OVER THE RESPONSIBILITY OF THE CORRECT ERROR HANDLING. THE DRIVER DOES NOT HAVE THE CONTROL OVER THAT DEVICE ANY MORE.
- Parameters
-
_commandID the command ID _selectID the sub command ID _cardNo the ID of the MPIA electronic card _moduleNo the ID of the device module _parameter the parameter as string _numberOfLines the number of lines that might be read
- See also
- dontParse
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ dontParse() [1/3]
|
pure virtual |
This method was requested by Lorenzo Busoni (lbusoni@arcetri.astro.it 02.03.2012)
It supports a direct communication with the MoCon. BUT THE USER OF THIS METHOD TAKE OVER THE RESPONSIBILITY OF THE CORRECT ERROR HANDLING. THE DRIVER DOES NOT HAVE THE CONTROL OVER THAT DEVICE ANY MORE.
Hi Martin,
that's exactly what I was thinking: The use case is (real example from our experience): we discover at the telescope that we need to continuously monitor a given property (PropA) of the MoCon (obviously because of a malfunctioning in the hardware!). Without this monitor, we will be stuck. You can add the required functionality in the Mocca adding the function getPropA: this requires 4 hours and the day is lost. The day after you are stuck because you discover that you miss PropB, and the day is lost again. As an alternative, one can add the 2 lines below in the code (with a comment: "1 10 0 = getPropA") and this requires 5 minutes. The day after one can add a similar line with 1 11 0. When you're back in Europe you implement getPropA and getPropB in Mocca and you cleanup the code removing the receiveResponseForComment
Generally speaking I think it is a safe idea to have a generic interface to access EVERY possible functionality of a device, because soon or later you'll need it. In the case of the Mocon it is quite easy, a good compromise between living dangerously and wasting too much time in the effort of a complete implementation of all the MoCon commands.
Lorenzo Busoni
- Parameters
-
_ret the allocated memory for the command response
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ dontParse() [2/3]
|
pure virtual |
This method was requested by Lorenzo Busoni (lbusoni@arcetri.astro.it 02.03.2012)
It supports a direct communication with the MoCon. BUT THE USER OF THIS METHOD TAKE OVER THE RESPONSIBILITY OF THE CORRECT ERROR HANDLING. THE DRIVER DOES NOT HAVE THE CONTROL OVER THAT DEVICE ANY MORE.
Hi Martin,
that's exactly what I was thinking: The use case is (real example from our experience): we discover at the telescope that we need to continuously monitor a given property (PropA) of the MoCon (obviously because of a malfunctioning in the hardware!). Without this monitor, we will be stuck. You can add the required functionality in the Mocca adding the function getPropA: this requires 4 hours and the day is lost. The day after you are stuck because you discover that you miss PropB, and the day is lost again. As an alternative, one can add the 2 lines below in the code (with a comment: "1 10 0 = getPropA") and this requires 5 minutes. The day after one can add a similar line with 1 11 0. When you're back in Europe you implement getPropA and getPropB in Mocca and you cleanup the code removing the receiveResponseForComment
Generally speaking I think it is a safe idea to have a generic interface to access EVERY possible functionality of a device, because soon or later you'll need it. In the case of the Mocon it is quite easy, a good compromise between living dangerously and wasting too much time in the effort of a complete implementation of all the MoCon commands.
Lorenzo Busoni
- Parameters
-
_ret the allocated memory for the command response
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ dontParse() [3/3]
|
pure virtual |
This method was requested by Lorenzo Busoni (lbusoni@arcetri.astro.it 02.03.2012)
It supports a direct communication with the MoCon. BUT THE USER OF THIS METHOD TAKE OVER THE RESPONSIBILITY OF THE CORRECT ERROR HANDLING. THE DRIVER DOES NOT HAVE THE CONTROL OVER THAT DEVICE ANY MORE.
Hi Martin,
that's exactly what I was thinking: The use case is (real example from our experience): we discover at the telescope that we need to continuously monitor a given property (PropA) of the MoCon (obviously because of a malfunctioning in the hardware!). Without this monitor, we will be stuck. You can add the required functionality in the Mocca adding the function getPropA: this requires 4 hours and the day is lost. The day after you are stuck because you discover that you miss PropB, and the day is lost again. As an alternative, one can add the 2 lines below in the code (with a comment: "1 10 0 = getPropA") and this requires 5 minutes. The day after one can add a similar line with 1 11 0. When you're back in Europe you implement getPropA and getPropB in Mocca and you cleanup the code removing the receiveResponseForComment
Generally speaking I think it is a safe idea to have a generic interface to access EVERY possible functionality of a device, because soon or later you'll need it. In the case of the Mocon it is quite easy, a good compromise between living dangerously and wasting too much time in the effort of a complete implementation of all the MoCon commands.
Lorenzo Busoni
- Parameters
-
_ret the allocated memory for the command response
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ dumpStatusInformation() [1/3]
|
pure virtual |
◆ dumpStatusInformation() [2/3]
|
pure virtual |
◆ dumpStatusInformation() [3/3]
|
pure virtual |
◆ getAbsoluteEncoderPosition() [1/3]
|
pure virtual |
Returns the current absolute encoder positions of all motors.
The current position of all motors might be stored in the property
- VAR.POSITION.ABSOLUTE_ENCODER
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getAbsoluteEncoderPosition() [2/3]
|
pure virtual |
Returns the current absolute encoder positions of all motors.
The current position of all motors might be stored in the property
- VAR.POSITION.ABSOLUTE_ENCODER
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getAbsoluteEncoderPosition() [3/3]
|
pure virtual |
Returns the current absolute encoder positions of all motors.
The current position of all motors might be stored in the property
- VAR.POSITION.ABSOLUTE_ENCODER
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getBasicSettings() [1/3]
|
pure virtual |
Returns the basic settings of all motors.
Depending of the implementation the basic settings could be: motion profile, revolution, velocity, acceleration, deceleration and jerk. Each basic settings is stored in a sequence.
- Returns
- a sequence of all motors with a sequence of all basic settings
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ getBasicSettings() [2/3]
|
pure virtual |
Returns the basic settings of all motors.
Depending of the implementation the basic settings could be: motion profile, revolution, velocity, acceleration, deceleration and jerk. Each basic settings is stored in a sequence.
- Returns
- a sequence of all motors with a sequence of all basic settings
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ getBasicSettings() [3/3]
|
pure virtual |
Returns the basic settings of all motors.
Depending of the implementation the basic settings could be: motion profile, revolution, velocity, acceleration, deceleration and jerk. Each basic settings is stored in a sequence.
- Returns
- a sequence of all motors with a sequence of all basic settings
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ getCurrentTime() [1/3]
|
pure virtual |
◆ getCurrentTime() [2/3]
|
pure virtual |
◆ getCurrentTime() [3/3]
|
pure virtual |
◆ getDeviceEncoderPosition() [1/3]
|
pure virtual |
Returns the current device internal position encoder of all motors.
Some devices, like the MoCon, have an internal software encoder/position counter, which is independent from the incremental and absolute encoder.
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ getDeviceEncoderPosition() [2/3]
|
pure virtual |
Returns the current device internal position encoder of all motors.
Some devices, like the MoCon, have an internal software encoder/position counter, which is independent from the incremental and absolute encoder.
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ getDeviceEncoderPosition() [3/3]
|
pure virtual |
Returns the current device internal position encoder of all motors.
Some devices, like the MoCon, have an internal software encoder/position counter, which is independent from the incremental and absolute encoder.
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ getIncrementalEncoderPosition() [1/3]
|
pure virtual |
Returns the current incremental encoder positions of all motors.
The current position of all motors might be stored in the property
- VAR.POSITION.INCREMENTAL_ENCODER
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getIncrementalEncoderPosition() [2/3]
|
pure virtual |
Returns the current incremental encoder positions of all motors.
The current position of all motors might be stored in the property
- VAR.POSITION.INCREMENTAL_ENCODER
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getIncrementalEncoderPosition() [3/3]
|
pure virtual |
Returns the current incremental encoder positions of all motors.
The current position of all motors might be stored in the property
- VAR.POSITION.INCREMENTAL_ENCODER
- Returns
- the current positions of all motors in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getLinkTimeout() [1/3]
|
pure virtual |
◆ getLinkTimeout() [2/3]
|
pure virtual |
◆ getLinkTimeout() [3/3]
|
pure virtual |
◆ getPosition() [1/3]
|
pure virtual |
This method is deprecated and will be exchanged with getDeviceencoderPosition()
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getPosition() [2/3]
|
pure virtual |
This method is deprecated and will be exchanged with getDeviceencoderPosition()
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getPosition() [3/3]
|
pure virtual |
This method is deprecated and will be exchanged with getDeviceencoderPosition()
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getPositionSwitchStatus() [1/3]
|
pure virtual |
The external profile will be configured and the external profile will uploaded to the MoCon.
- Parameters
-
_positionSequence a vector with the profile for each motor _timeResolution segmentLength / samplesPerSegment _samplesPerSegment samples per segment _maxError the maximal error that the external profile can have after the conversion to a MoCon profile _asynch the call back object This method starts the external profile at a certain data.
The external profile can be stopped with the stop method.
- Parameters
-
_date a vector with the start date of all motors. The order of the dates is corresponding to the order of the motor names in the property tree (alphabetical). Use the constant Basda::STAY if the motor should move. _asynch the call back object
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getPositionSwitchStatus() [2/3]
|
pure virtual |
The external profile will be configured and the external profile will uploaded to the MoCon.
- Parameters
-
_positionSequence a vector with the profile for each motor _timeResolution segmentLength / samplesPerSegment _samplesPerSegment samples per segment _maxError the maximal error that the external profile can have after the conversion to a MoCon profile _asynch the call back object This method starts the external profile at a certain data.
The external profile can be stopped with the stop method.
- Parameters
-
_date a vector with the start date of all motors. The order of the dates is corresponding to the order of the motor names in the property tree (alphabetical). Use the constant Basda::STAY if the motor should move. _asynch the call back object
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getPositionSwitchStatus() [3/3]
|
pure virtual |
The external profile will be configured and the external profile will uploaded to the MoCon.
- Parameters
-
_positionSequence a vector with the profile for each motor _timeResolution segmentLength / samplesPerSegment _samplesPerSegment samples per segment _maxError the maximal error that the external profile can have after the conversion to a MoCon profile _asynch the call back object This method starts the external profile at a certain data.
The external profile can be stopped with the stop method.
- Parameters
-
_date a vector with the start date of all motors. The order of the dates is corresponding to the order of the motor names in the property tree (alphabetical). Use the constant Basda::STAY if the motor should move. _asynch the call back object
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getReferenceTime() [1/3]
|
pure virtual |
◆ getReferenceTime() [2/3]
|
pure virtual |
◆ getReferenceTime() [3/3]
|
pure virtual |
◆ getVelocity() [1/3]
|
pure virtual |
Returns the current velocity of all motors.
The current velocity of all motors might be stored in the property
- VAR.VELOCITY
- Returns
- a vector with the current velocity of all motors
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getVelocity() [2/3]
|
pure virtual |
Returns the current velocity of all motors.
The current velocity of all motors might be stored in the property
- VAR.VELOCITY
- Returns
- a vector with the current velocity of all motors
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ getVelocity() [3/3]
|
pure virtual |
Returns the current velocity of all motors.
The current velocity of all motors might be stored in the property
- VAR.VELOCITY
- Returns
- a vector with the current velocity of all motors
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isAtHome() [1/3]
|
pure virtual |
This method indicate whether the motor is at the home position.
- Parameters
-
_atHome each flag in that Bitset indicate whether the motor is at home (true - motor is at home;). The order of the bits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isAtHome() [2/3]
|
pure virtual |
This method indicate whether the motor is at the home position.
- Parameters
-
_atHome each flag in that Bitset indicate whether the motor is at home (true - motor is at home;). The order of the bits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isAtHome() [3/3]
|
pure virtual |
This method indicate whether the motor is at the home position.
- Parameters
-
_atHome each flag in that Bitset indicate whether the motor is at home (true - motor is at home;). The order of the bits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isAtLimit() [1/3]
|
pure virtual |
Returns the current limit switch state of all motors in a vector.
- Returns
- true if on of the motors is in the limits. The order of the limits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isAtLimit() [2/3]
|
pure virtual |
Returns the current limit switch state of all motors in a vector.
- Returns
- true if on of the motors is in the limits. The order of the limits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isAtLimit() [3/3]
|
pure virtual |
Returns the current limit switch state of all motors in a vector.
- Returns
- true if on of the motors is in the limits. The order of the limits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isMoving() [1/3]
|
pure virtual |
Returns the motion flag of all motors in a vector.
- Returns
- true if at least one motor is in motion. The order of the bits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isMoving() [2/3]
|
pure virtual |
Returns the motion flag of all motors in a vector.
- Returns
- true if at least one motor is in motion. The order of the bits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isMoving() [3/3]
|
pure virtual |
Returns the motion flag of all motors in a vector.
- Returns
- true if at least one motor is in motion. The order of the bits is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ isReachable() [1/3]
|
pure virtual |
◆ isReachable() [2/3]
|
pure virtual |
◆ isReachable() [3/3]
|
pure virtual |
◆ moveAbsolute() [1/3]
|
pure virtual |
All motors of a device move to the absolute position.
- Parameters
-
_positions a vector containing the absolute target position in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical). _async the call back object
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ moveAbsolute() [2/3]
|
pure virtual |
All motors of a device move to the absolute position.
- Parameters
-
_positions a vector containing the absolute target position in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical). _async the call back object
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ moveAbsolute() [3/3]
|
pure virtual |
All motors of a device move to the absolute position.
- Parameters
-
_positions a vector containing the absolute target position in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical). _async the call back object
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ moveAbsoluteStart() [1/3]
|
pure virtual |
◆ moveAbsoluteStart() [2/3]
|
pure virtual |
◆ moveAbsoluteStart() [3/3]
|
pure virtual |
◆ moveAbsoluteWait() [1/3]
|
pure virtual |
◆ moveAbsoluteWait() [2/3]
|
pure virtual |
◆ moveAbsoluteWait() [3/3]
|
pure virtual |
◆ moveRelative() [1/3]
|
pure virtual |
All motors of a device move to the relative position.
- Parameters
-
_positions a vector containing the relative target position in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical). _async the call back object
- Todo:
- change std::map<std::string, double> to Nice::NPoint
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ moveRelative() [2/3]
|
pure virtual |
All motors of a device move to the relative position.
- Parameters
-
_positions a vector containing the relative target position in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical). _async the call back object
- Todo:
- change std::map<std::string, double> to Nice::NPoint
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ moveRelative() [3/3]
|
pure virtual |
All motors of a device move to the relative position.
- Parameters
-
_positions a vector containing the relative target position in steps. The order of the points is corresponding to the order of the motor names in the property tree (alphabetical). _async the call back object
- Todo:
- change std::map<std::string, double> to Nice::NPoint
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ moveRelativeStart() [1/3]
|
pure virtual |
◆ moveRelativeStart() [2/3]
|
pure virtual |
◆ moveRelativeStart() [3/3]
|
pure virtual |
◆ moveRelativeWait() [1/3]
|
pure virtual |
◆ moveRelativeWait() [2/3]
|
pure virtual |
◆ moveRelativeWait() [3/3]
|
pure virtual |
◆ prepareDirectMove() [1/3]
|
pure virtual |
This method setup the acceleration anv velocity for a direct point to point move.
- Parameters
-
_acceleration _velocity _deceleration
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ prepareDirectMove() [2/3]
|
pure virtual |
This method setup the acceleration anv velocity for a direct point to point move.
- Parameters
-
_acceleration _velocity _deceleration
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ prepareDirectMove() [3/3]
|
pure virtual |
This method setup the acceleration anv velocity for a direct point to point move.
- Parameters
-
_acceleration _velocity _deceleration
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ prepareExternalProfile() [1/3]
|
pure virtual |
◆ prepareExternalProfile() [2/3]
|
pure virtual |
◆ prepareExternalProfile() [3/3]
|
pure virtual |
◆ prepareMoveSync() [1/3]
|
pure virtual |
◆ prepareMoveSync() [2/3]
|
pure virtual |
◆ prepareMoveSync() [3/3]
|
pure virtual |
◆ receiveDataRaw() [1/3]
|
pure virtual |
◆ receiveDataRaw() [2/3]
|
pure virtual |
◆ receiveDataRaw() [3/3]
|
pure virtual |
◆ setAccelerationSetting() [1/3]
|
pure virtual |
Set the acceleration configuration parameter of all motors.
- Parameters
-
_acceleration a vector with the acceleration of all motors. The order of the accelerations is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setAccelerationSetting() [2/3]
|
pure virtual |
Set the acceleration configuration parameter of all motors.
- Parameters
-
_acceleration a vector with the acceleration of all motors. The order of the accelerations is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setAccelerationSetting() [3/3]
|
pure virtual |
Set the acceleration configuration parameter of all motors.
- Parameters
-
_acceleration a vector with the acceleration of all motors. The order of the accelerations is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setCollision() [1/3]
|
pure virtual |
◆ setCollision() [2/3]
|
pure virtual |
◆ setCollision() [3/3]
|
pure virtual |
◆ setDecelerationSetting() [1/3]
|
pure virtual |
Set the deceleration configuration parameter of all motors.
- Parameters
-
_deceleration a vector with the deceleration of all motors. The order of the decelerations is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setDecelerationSetting() [2/3]
|
pure virtual |
Set the deceleration configuration parameter of all motors.
- Parameters
-
_deceleration a vector with the deceleration of all motors. The order of the decelerations is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setDecelerationSetting() [3/3]
|
pure virtual |
Set the deceleration configuration parameter of all motors.
- Parameters
-
_deceleration a vector with the deceleration of all motors. The order of the decelerations is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setJerkSetting() [1/3]
|
pure virtual |
Set the jerk configuration parameter of all motors.
- Parameters
-
_jerk a vector with the jerk of all motors. The order of the jerks is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setJerkSetting() [2/3]
|
pure virtual |
Set the jerk configuration parameter of all motors.
- Parameters
-
_jerk a vector with the jerk of all motors. The order of the jerks is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setJerkSetting() [3/3]
|
pure virtual |
Set the jerk configuration parameter of all motors.
- Parameters
-
_jerk a vector with the jerk of all motors. The order of the jerks is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setLinkTimeout() [1/3]
|
pure virtual |
◆ setLinkTimeout() [2/3]
|
pure virtual |
◆ setLinkTimeout() [3/3]
|
pure virtual |
◆ setPosition() [1/3]
|
pure virtual |
Change the absolute position of all motors.
The motor will not move, only the absolute position will be set.
- Parameters
-
_position a vector with the position of all motors
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ setPosition() [2/3]
|
pure virtual |
Change the absolute position of all motors.
The motor will not move, only the absolute position will be set.
- Parameters
-
_position a vector with the position of all motors
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ setPosition() [3/3]
|
pure virtual |
Change the absolute position of all motors.
The motor will not move, only the absolute position will be set.
- Parameters
-
_position a vector with the position of all motors
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, Basda::MoConNDeviceDummy, Basda::NDeviceMock, and Basda::NDeviceMock.
◆ setVelocitySetting() [1/3]
|
pure virtual |
Set the velocity configuration parameter of all motors.
- Parameters
-
_velocity a vector with the velocity of all motors. The order of the velocities is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setVelocitySetting() [2/3]
|
pure virtual |
Set the velocity configuration parameter of all motors.
- Parameters
-
_velocity a vector with the velocity of all motors. The order of the velocities is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ setVelocitySetting() [3/3]
|
pure virtual |
Set the velocity configuration parameter of all motors.
- Parameters
-
_velocity a vector with the velocity of all motors. The order of the velocities is corresponding to the order of the motor names in the property tree (alphabetical).
Implemented in Basda::MoConNDevice, Basda::MoConNDevice, Basda::MoccaPiNDevice, Basda::MoccaPiNDevice, Basda::MoccaNDeviceDummy, Basda::MoccaNDeviceDummy, Basda::MoConNDeviceDummy, and Basda::MoConNDeviceDummy.
◆ startExternalProfile() [1/6]
|
pure virtual |
◆ startExternalProfile() [2/6]
|
pure virtual |
◆ startExternalProfile() [3/6]
|
pure virtual |
◆ startExternalProfile() [4/6]
|
pure virtual |
◆ startExternalProfile() [5/6]
|
pure virtual |
◆ startExternalProfile() [6/6]
|
pure virtual |
◆ startMoveSync() [1/3]
|
pure virtual |
◆ startMoveSync() [2/3]
|
pure virtual |
◆ startMoveSync() [3/3]
|
pure virtual |
The documentation for this class was generated from the following file:
- /home/nirva/insroot/include/Basda/Mocca/NDevice.h
