|
| | MoccaDevice (const Nice::JointPtr &_config) |
| | Constructor. More...
|
| |
| virtual | ~MoccaDevice () |
| |
| virtual void | moveToHome (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the home position. More...
|
| |
| virtual void | moveToHomeStart (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeSingle (const int _index, DeviceAsync &=s_async)=0 |
| |
| virtual void | moveToHomeSingleStart (int _motor, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeSingleWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToPositiveLimit (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the positive limit switch. More...
|
| |
| virtual void | moveToPositiveLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToPositiveLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToNegativeLimit (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the negative limit switch. More...
|
| |
| virtual void | moveToNegativeLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToNegativeLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToLimit (const Nice::NPoint &_limits, DeviceAsync &=s_async)=0 |
| | move all motors to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More...
|
| |
| virtual void | moveToLimitStart (const Nice::NPoint &_limit, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToLimitWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | stop ()=0 |
| | All motors of a device stop moving. More...
|
| |
| virtual void | abort ()=0 |
| | All motors of a device abort the current movement. More...
|
| |
| virtual Nice::Completion | getProgress ()=0 |
| |
| | MoccaDevice (const Nice::JointPtr &_config) |
| | Constructor. More...
|
| |
| virtual | ~MoccaDevice () |
| |
| virtual void | moveToHome (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the home position. More...
|
| |
| virtual void | moveToHomeStart (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeSingle (const int _index, DeviceAsync &=s_async)=0 |
| |
| virtual void | moveToHomeSingleStart (int _motor, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeSingleWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToPositiveLimit (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the positive limit switch. More...
|
| |
| virtual void | moveToPositiveLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToPositiveLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToNegativeLimit (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the negative limit switch. More...
|
| |
| virtual void | moveToNegativeLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToNegativeLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToLimit (const Nice::NPoint &_limits, DeviceAsync &=s_async)=0 |
| | move all motors to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More...
|
| |
| virtual void | moveToLimitStart (const Nice::NPoint &_limit, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToLimitWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | stop ()=0 |
| | All motors of a device stop moving. More...
|
| |
| virtual void | abort ()=0 |
| | All motors of a device abort the current movement. More...
|
| |
| virtual Nice::Completion | getProgress ()=0 |
| |
| | MoccaDevice (const Nice::JointPtr &_config) |
| | Constructor. More...
|
| |
| virtual | ~MoccaDevice () |
| |
| virtual void | moveToHome (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the home position. More...
|
| |
| virtual void | moveToHomeStart (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeSingle (const int _index, DeviceAsync &=s_async)=0 |
| |
| virtual void | moveToHomeSingleStart (int _motor, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToHomeSingleWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToPositiveLimit (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the positive limit switch. More...
|
| |
| virtual void | moveToPositiveLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToPositiveLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToNegativeLimit (DeviceAsync &=s_async)=0 |
| | All motors of a device move to the negative limit switch. More...
|
| |
| virtual void | moveToNegativeLimitStart (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToNegativeLimitWait (Basda::DeviceAsync &_async=Basda::Device::s_async)=0 |
| |
| virtual void | moveToLimit (const Nice::NPoint &_limits, DeviceAsync &=s_async)=0 |
| | move all motors to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More...
|
| |
| virtual void | moveToLimitStart (const Nice::NPoint &_limit, Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | moveToLimitWait (Basda::DeviceAsync &=Basda::Device::s_async)=0 |
| |
| virtual void | stop ()=0 |
| | All motors of a device stop moving. More...
|
| |
| virtual void | abort ()=0 |
| | All motors of a device abort the current movement. More...
|
| |
| virtual Nice::Completion | getProgress ()=0 |
| |
| | Device (const Nice::JointPtr &_config) |
| | constructor. This is an elementary (lazy) action which stores the name and gets configuration. More...
|
| |
| virtual | ~Device () |
| | destructor Does nothing More...
|
| |
| virtual void | setConfig (const Nice::JointPtr &_config) |
| | init with config tree ptr More...
|
| |
| Nice::JointPtr & | config () |
| | retrieve the property tree More...
|
| |
| std::string & | name () |
| | retrieve the name set at ctor time. More...
|
| |
| virtual void | open ()=0 |
| | open device More...
|
| |
| virtual void | close ()=0 |
| | close device More...
|
| |
| virtual void | reset (DeviceAsync &=s_async)=0 |
| | reset the device More...
|
| |
| virtual void | version ()=0 |
| | version More...
|
| |
| virtual void | init (DeviceAsync &=s_async)=0 |
| | init the device More...
|
| |
| virtual void | deinit (DeviceAsync &=s_async)=0 |
| | deinit the device More...
|
| |
| virtual void | activate (DeviceAsync &=s_async)=0 |
| | activate the device More...
|
| |
| virtual void | deactivate (DeviceAsync &=s_async)=0 |
| | deactivate the device More...
|
| |
| | Device (const Nice::JointPtr &_config) |
| | constructor. This is an elementary (lazy) action which stores the name and gets configuration. More...
|
| |
| virtual | ~Device () |
| | destructor Does nothing More...
|
| |
| virtual void | setConfig (const Nice::JointPtr &_config) |
| | init with config tree ptr More...
|
| |
| Nice::JointPtr & | config () |
| | retrieve the property tree More...
|
| |
| std::string & | name () |
| | retrieve the name set at ctor time. More...
|
| |
| virtual void | open ()=0 |
| | open device More...
|
| |
| virtual void | close ()=0 |
| | close device More...
|
| |
| virtual void | reset (DeviceAsync &=s_async)=0 |
| | reset the device More...
|
| |
| virtual void | version ()=0 |
| | version More...
|
| |
| virtual void | init (DeviceAsync &=s_async)=0 |
| | init the device More...
|
| |
| virtual void | deinit (DeviceAsync &=s_async)=0 |
| | deinit the device More...
|
| |
| virtual void | activate (DeviceAsync &=s_async)=0 |
| | activate the device More...
|
| |
| virtual void | deactivate (DeviceAsync &=s_async)=0 |
| | deactivate the device More...
|
| |
|
| enum | CMDS {
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT,
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT,
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT
} |
| |
| enum | CMDS {
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT,
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT,
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT
} |
| |
| enum | CMDS {
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT,
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT,
OPEN,
CLOSE,
RESET,
INIT,
DEINIT,
ACTIVATE,
DEACTIVATE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
STOP,
ABORT
} |
| |
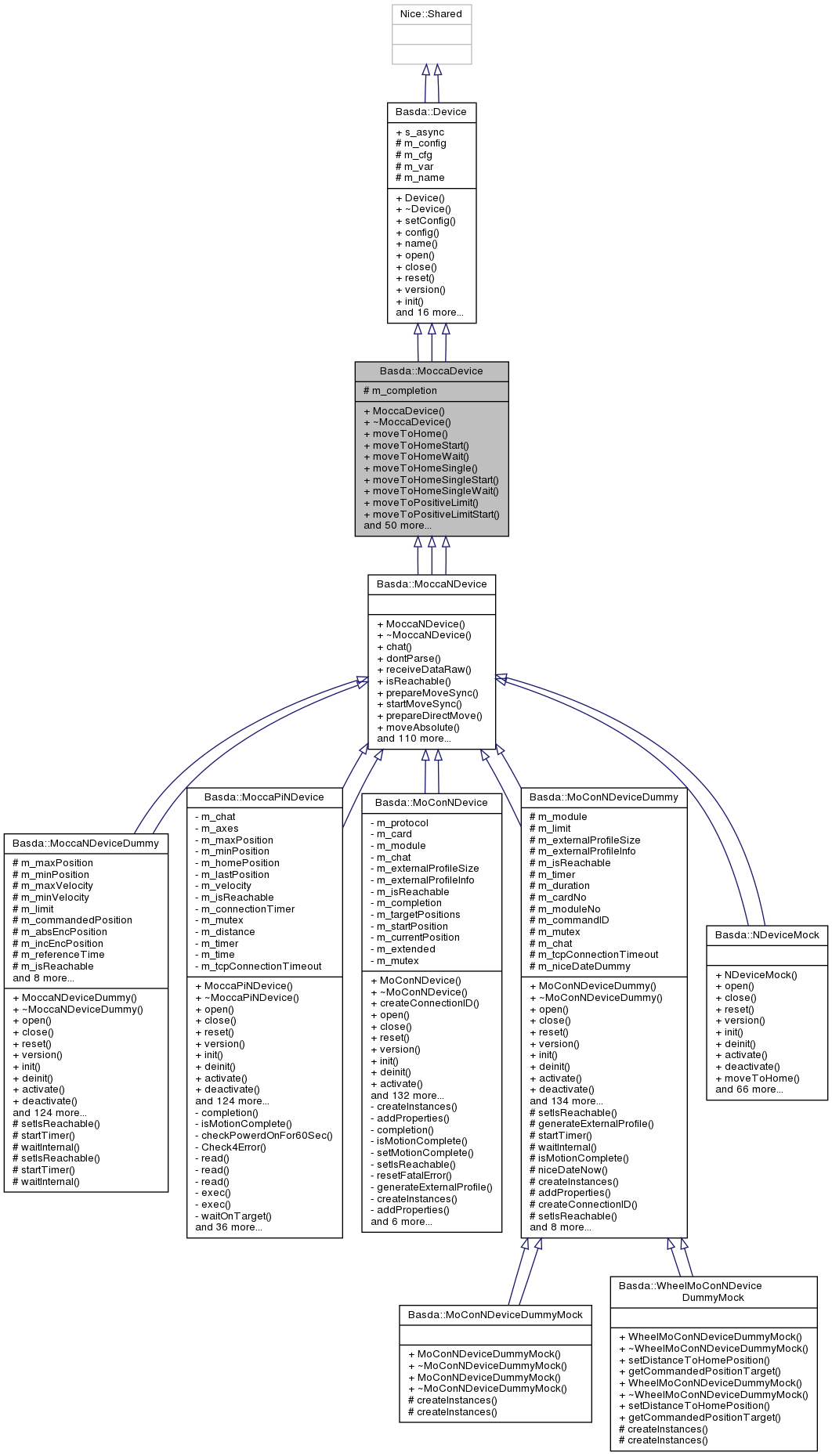
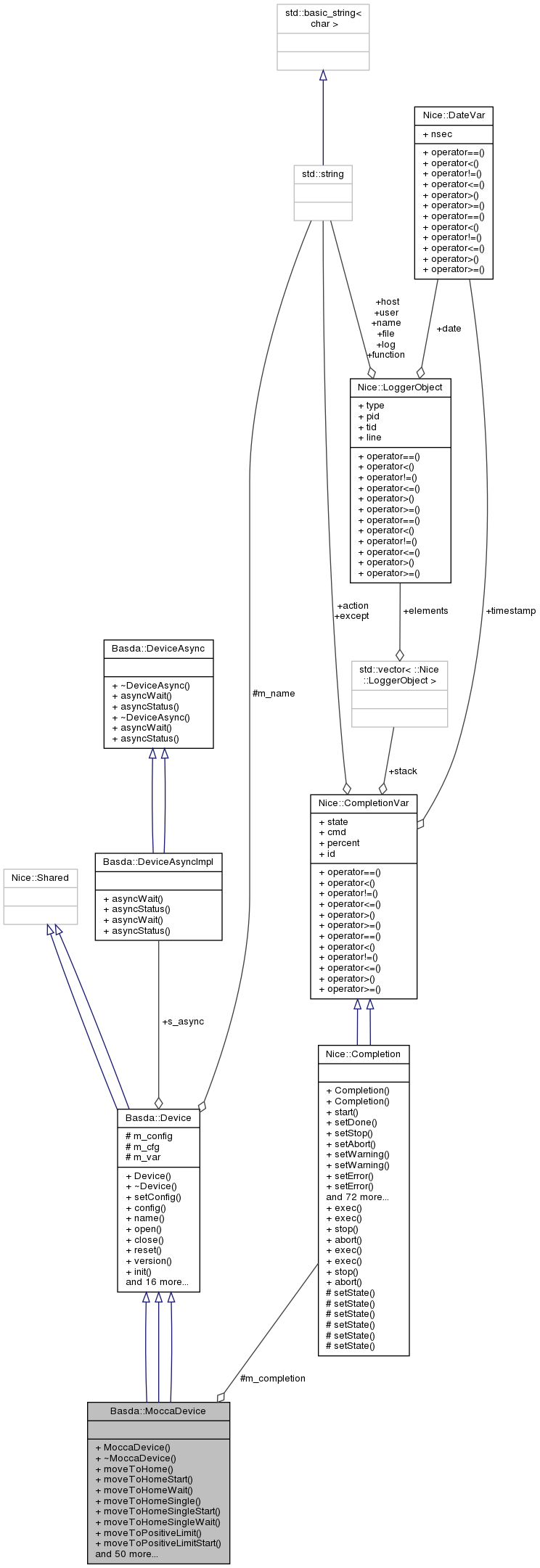
This is the generic MoCon device interface.
- Author
- Frank Kittmann
- Version
- 09.06.23
- Date
- 2009.06.23
 Public Member Functions inherited from Basda::Device
Public Member Functions inherited from Basda::Device