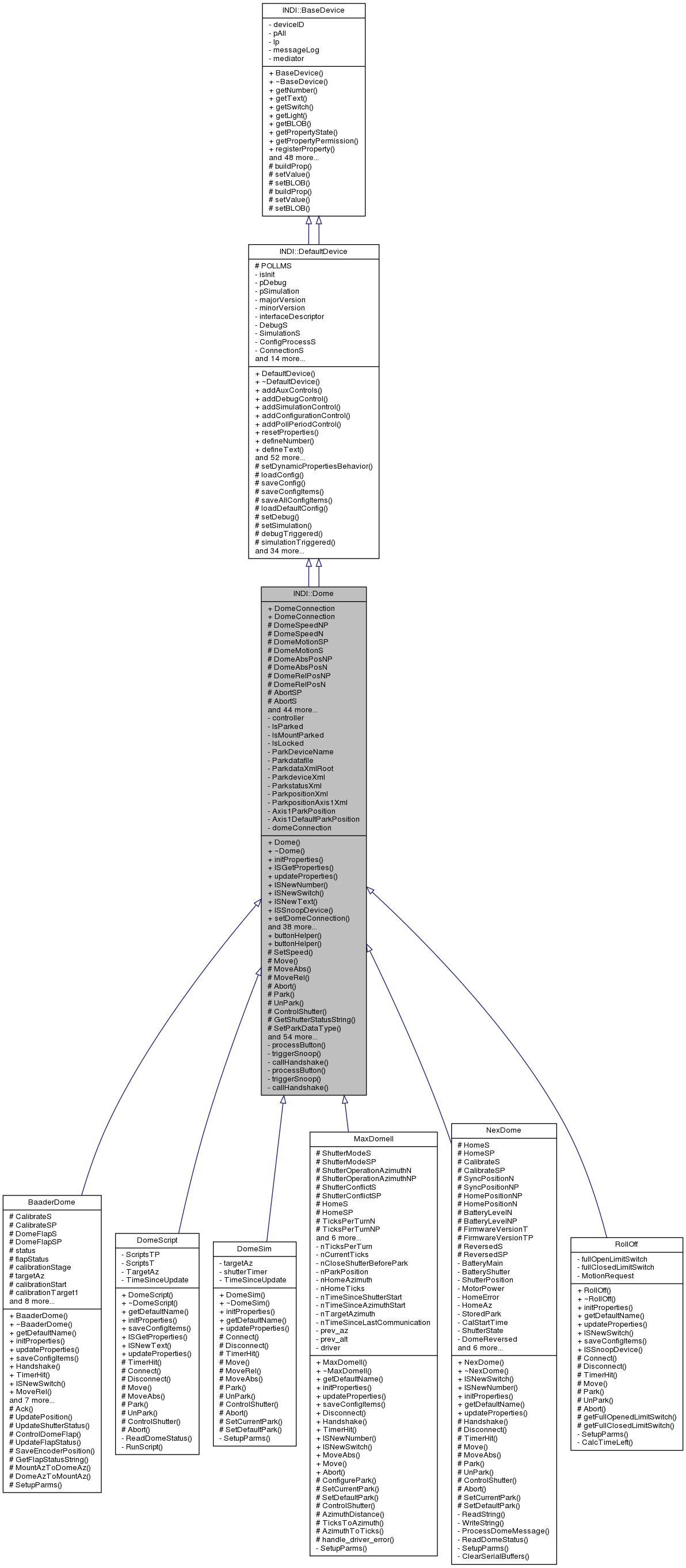
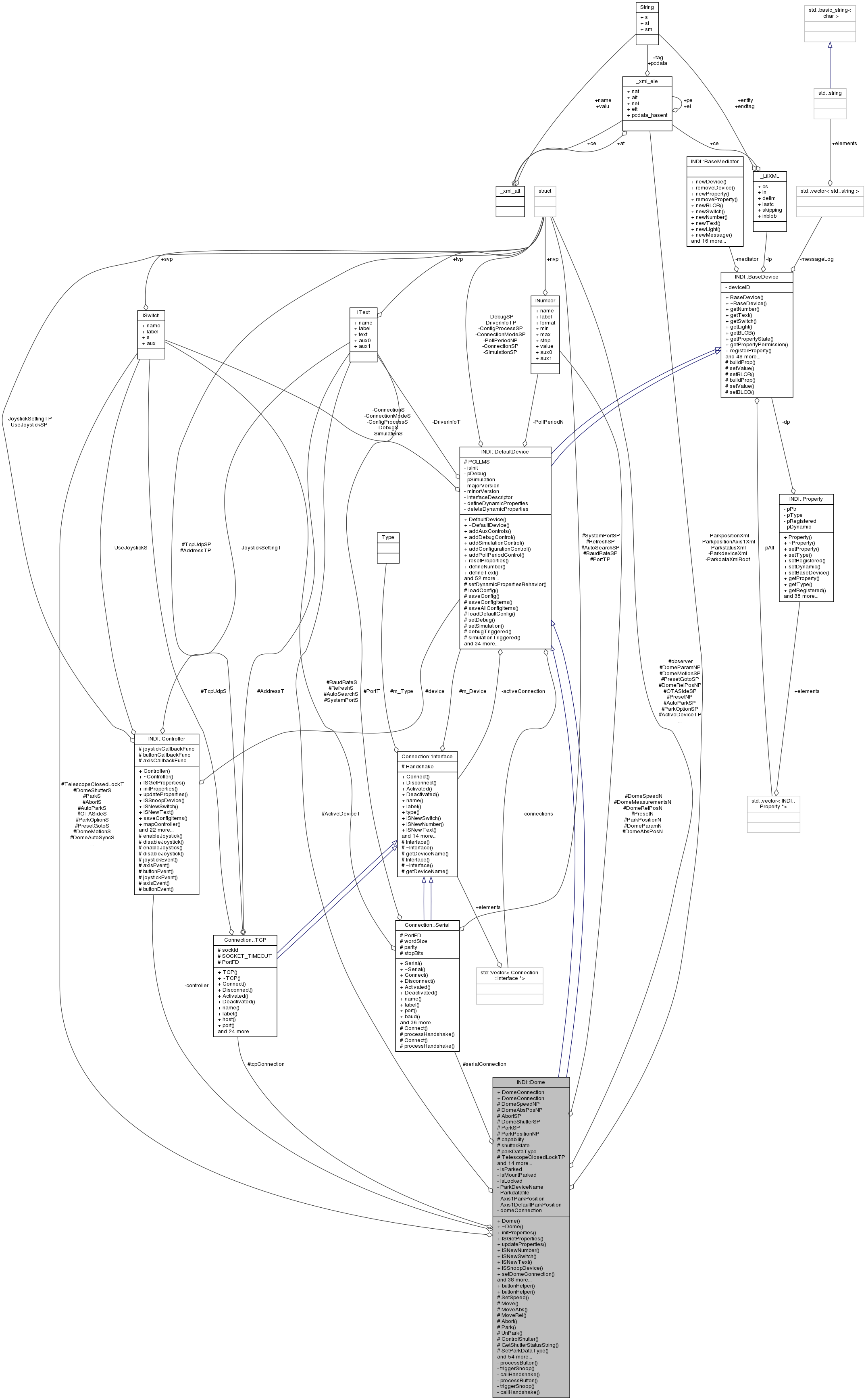
Class to provide general functionality of a Dome device.
More...
#include <indidome.h>
Public Member Functions | |
| Dome () | |
| virtual | ~Dome () |
| virtual bool | initProperties () |
| Initilize properties initial state and value. More... | |
| virtual void | ISGetProperties (const char *dev) |
| define the driver's properties to the client. More... | |
| virtual bool | updateProperties () |
| updateProperties is called whenever there is a change in the CONNECTION status of the driver. More... | |
| virtual bool | ISNewNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| Process the client newNumber command. More... | |
| virtual bool | ISNewSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| Process the client newSwitch command. More... | |
| virtual bool | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int n) |
| Process the client newSwitch command. More... | |
| virtual bool | ISSnoopDevice (XMLEle *root) |
| Process a snoop event from INDI server. More... | |
| void | setDomeConnection (const uint8_t &value) |
| setDomeConnection Set Dome connection mode. More... | |
| uint8_t | getDomeConnection () const |
| uint32_t | GetDomeCapability () const |
| GetDomeCapability returns the capability of the dome. More... | |
| void | SetDomeCapability (uint32_t cap) |
| SetDomeCapability set the dome capabilities. More... | |
| bool | CanAbort () |
| bool | CanAbsMove () |
| bool | CanRelMove () |
| bool | CanPark () |
| bool | HasShutter () |
| bool | HasVariableSpeed () |
| bool | isLocked () |
| isLocked, is the dome currently locked? More... | |
| DomeState | getDomeState () const |
| void | setDomeState (const DomeState &value) |
| IPState | getWeatherState () const |
| IPState | getMountState () const |
| Dome () | |
| virtual | ~Dome () |
| virtual bool | initProperties () |
| Initilize properties initial state and value. More... | |
| virtual void | ISGetProperties (const char *dev) |
| define the driver's properties to the client. More... | |
| virtual bool | updateProperties () |
| updateProperties is called whenever there is a change in the CONNECTION status of the driver. More... | |
| virtual bool | ISNewNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| Process the client newNumber command. More... | |
| virtual bool | ISNewSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| Process the client newSwitch command. More... | |
| virtual bool | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int n) |
| Process the client newSwitch command. More... | |
| virtual bool | ISSnoopDevice (XMLEle *root) |
| Process a snoop event from INDI server. More... | |
| void | setDomeConnection (const uint8_t &value) |
| setDomeConnection Set Dome connection mode. More... | |
| uint8_t | getDomeConnection () const |
| uint32_t | GetDomeCapability () const |
| GetDomeCapability returns the capability of the dome. More... | |
| void | SetDomeCapability (uint32_t cap) |
| SetDomeCapability set the dome capabilities. More... | |
| bool | CanAbort () |
| bool | CanAbsMove () |
| bool | CanRelMove () |
| bool | CanPark () |
| bool | HasShutter () |
| bool | HasVariableSpeed () |
| bool | isLocked () |
| isLocked, is the dome currently locked? More... | |
| DomeState | getDomeState () const |
| void | setDomeState (const DomeState &value) |
| IPState | getWeatherState () const |
| IPState | getMountState () const |
 Public Member Functions inherited from INDI::DefaultDevice Public Member Functions inherited from INDI::DefaultDevice | |
| DefaultDevice () | |
| virtual | ~DefaultDevice () |
| void | addAuxControls () |
| Add Debug, Simulation, and Configuration options to the driver. More... | |
| void | addDebugControl () |
| Add Debug control to the driver. More... | |
| void | addSimulationControl () |
| Add Simulation control to the driver. More... | |
| void | addConfigurationControl () |
| Add Configuration control to the driver. More... | |
| void | addPollPeriodControl () |
| Add Polling period control to the driver. More... | |
| void | resetProperties () |
| Set all properties to IDLE state. More... | |
| void | defineNumber (INumberVectorProperty *nvp) |
| Define number vector to client & register it. More... | |
| void | defineText (ITextVectorProperty *tvp) |
| Define text vector to client & register it. More... | |
| void | defineSwitch (ISwitchVectorProperty *svp) |
| Define switch vector to client & register it. More... | |
| void | defineLight (ILightVectorProperty *lvp) |
| Define light vector to client & register it. More... | |
| void | defineBLOB (IBLOBVectorProperty *bvp) |
| Define BLOB vector to client & register it. More... | |
| virtual bool | deleteProperty (const char *propertyName) |
| Delete a property and unregister it. More... | |
| virtual void | setConnected (bool status, IPState state=IPS_OK, const char *msg=nullptr) |
| Set connection switch status in the client. More... | |
| int | SetTimer (uint32_t ms) |
| Set a timer to call the function TimerHit after ms milliseconds. More... | |
| void | RemoveTimer (int id) |
| Remove timer added with SetTimer. More... | |
| virtual void | TimerHit () |
| Callback function to be called once SetTimer duration elapses. More... | |
| virtual const char * | getDriverExec () |
| virtual const char * | getDriverName () |
| void | setVersion (uint16_t vMajor, uint16_t vMinor) |
| Set driver version information to be defined in DRIVER_INFO property as vMajor.vMinor. More... | |
| uint16_t | getMajorVersion () |
| uint16_t | getMinorVersion () |
| virtual bool | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| Process the client newBLOB command. More... | |
| virtual uint16_t | getDriverInterface () |
| void | setDriverInterface (uint16_t value) |
| setInterface Set driver interface. More... | |
| DefaultDevice () | |
| virtual | ~DefaultDevice () |
| void | addAuxControls () |
| Add Debug, Simulation, and Configuration options to the driver. More... | |
| void | addDebugControl () |
| Add Debug control to the driver. More... | |
| void | addSimulationControl () |
| Add Simulation control to the driver. More... | |
| void | addConfigurationControl () |
| Add Configuration control to the driver. More... | |
| void | addPollPeriodControl () |
| Add Polling period control to the driver. More... | |
| void | resetProperties () |
| Set all properties to IDLE state. More... | |
| void | defineNumber (INumberVectorProperty *nvp) |
| Define number vector to client & register it. More... | |
| void | defineText (ITextVectorProperty *tvp) |
| Define text vector to client & register it. More... | |
| void | defineSwitch (ISwitchVectorProperty *svp) |
| Define switch vector to client & register it. More... | |
| void | defineLight (ILightVectorProperty *lvp) |
| Define light vector to client & register it. More... | |
| void | defineBLOB (IBLOBVectorProperty *bvp) |
| Define BLOB vector to client & register it. More... | |
| virtual bool | deleteProperty (const char *propertyName) |
| Delete a property and unregister it. More... | |
| virtual void | setConnected (bool status, IPState state=IPS_OK, const char *msg=nullptr) |
| Set connection switch status in the client. More... | |
| int | SetTimer (uint32_t ms) |
| Set a timer to call the function TimerHit after ms milliseconds. More... | |
| void | RemoveTimer (int id) |
| Remove timer added with SetTimer. More... | |
| virtual void | TimerHit () |
| Callback function to be called once SetTimer duration elapses. More... | |
| virtual const char * | getDriverExec () |
| virtual const char * | getDriverName () |
| void | setVersion (uint16_t vMajor, uint16_t vMinor) |
| Set driver version information to be defined in DRIVER_INFO property as vMajor.vMinor. More... | |
| uint16_t | getMajorVersion () |
| uint16_t | getMinorVersion () |
| virtual bool | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| Process the client newBLOB command. More... | |
| virtual uint16_t | getDriverInterface () |
| void | setDriverInterface (uint16_t value) |
| setInterface Set driver interface. More... | |
| Public Member Functions inherited from INDI::BaseDevice | |
| BaseDevice () | |
| virtual | ~BaseDevice () |
| INumberVectorProperty * | getNumber (const char *name) |
| ITextVectorProperty * | getText (const char *name) |
| ISwitchVectorProperty * | getSwitch (const char *name) |
| ILightVectorProperty * | getLight (const char *name) |
| IBLOBVectorProperty * | getBLOB (const char *name) |
| IPState | getPropertyState (const char *name) |
| IPerm | getPropertyPermission (const char *name) |
| void | registerProperty (void *p, INDI_PROPERTY_TYPE type) |
| int | removeProperty (const char *name, char *errmsg) |
| Remove a property. More... | |
| void * | getRawProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| Return a property and its type given its name. More... | |
| INDI::Property * | getProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| Return a property and its type given its name. More... | |
| std::vector< INDI::Property * > * | getProperties () |
| Return a list of all properties in the device. More... | |
| bool | buildSkeleton (const char *filename) |
| Build driver properties from a skeleton file. More... | |
| bool | isConnected () |
| void | setDeviceName (const char *dev) |
| Set the device name. More... | |
| const char * | getDeviceName () |
| void | addMessage (const std::string &msg) |
| Add message to the driver's message queue. More... | |
| void | checkMessage (XMLEle *root) |
| void | doMessage (XMLEle *msg) |
| std::string | messageQueue (int index) const |
| std::string | lastMessage () |
| void | setMediator (INDI::BaseMediator *med) |
| Set the driver's mediator to receive notification of news devices and updated property values. More... | |
| INDI::BaseMediator * | getMediator () |
| const char * | getDriverName () |
| const char * | getDriverExec () |
| const char * | getDriverVersion () |
| BaseDevice () | |
| virtual | ~BaseDevice () |
| INumberVectorProperty * | getNumber (const char *name) |
| ITextVectorProperty * | getText (const char *name) |
| ISwitchVectorProperty * | getSwitch (const char *name) |
| ILightVectorProperty * | getLight (const char *name) |
| IBLOBVectorProperty * | getBLOB (const char *name) |
| IPState | getPropertyState (const char *name) |
| IPerm | getPropertyPermission (const char *name) |
| void | registerProperty (void *p, INDI_PROPERTY_TYPE type) |
| int | removeProperty (const char *name, char *errmsg) |
| Remove a property. More... | |
| void * | getRawProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| Return a property and its type given its name. More... | |
| INDI::Property * | getProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| Return a property and its type given its name. More... | |
| std::vector< INDI::Property * > * | getProperties () |
| Return a list of all properties in the device. More... | |
| bool | buildSkeleton (const char *filename) |
| Build driver properties from a skeleton file. More... | |
| bool | isConnected () |
| void | setDeviceName (const char *dev) |
| Set the device name. More... | |
| const char * | getDeviceName () |
| void | addMessage (const std::string &msg) |
| Add message to the driver's message queue. More... | |
| void | checkMessage (XMLEle *root) |
| void | doMessage (XMLEle *msg) |
| std::string | messageQueue (int index) const |
| std::string | lastMessage () |
| void | setMediator (INDI::BaseMediator *med) |
| Set the driver's mediator to receive notification of news devices and updated property values. More... | |
| INDI::BaseMediator * | getMediator () |
| const char * | getDriverName () |
| const char * | getDriverExec () |
| const char * | getDriverVersion () |
Static Public Member Functions | |
| static void | buttonHelper (const char *button_n, ISState state, void *context) |
| static void | buttonHelper (const char *button_n, ISState state, void *context) |
Public Attributes | |
| enum INDI::Dome:: { ... } | DomeConnection |
| enum INDI::Dome:: { ... } | DomeConnection |
Protected Member Functions | |
| virtual bool | SetSpeed (double rpm) |
| SetSpeed Set Dome speed. More... | |
| virtual IPState | Move (DomeDirection dir, DomeMotionCommand operation) |
| Move the Dome in a particular direction. More... | |
| virtual IPState | MoveAbs (double az) |
| Move the Dome to an absolute azimuth. More... | |
| virtual IPState | MoveRel (double azDiff) |
| Move the Dome to an relative position. More... | |
| virtual bool | Abort () |
| Abort all dome motion. More... | |
| virtual IPState | Park () |
| Goto Park Position. More... | |
| virtual IPState | UnPark () |
| UnPark dome. More... | |
| virtual IPState | ControlShutter (ShutterOperation operation) |
| Open or Close shutter. More... | |
| const char * | GetShutterStatusString (ShutterStatus status) |
| getShutterStatusString More... | |
| void | SetParkDataType (DomeParkData type) |
| setParkDataType Sets the type of parking data stored in the park data file and presented to the user. More... | |
| bool | InitPark () |
| InitPark Loads parking data (stored in ~/.indi/ParkData.xml) that contains parking status and parking position. More... | |
| bool | isParked () |
| isParked is dome currently parked? More... | |
| void | SetParked (bool isparked) |
| SetParked Change the mount parking status. More... | |
| double | GetAxis1Park () |
| double | GetAxis1ParkDefault () |
| void | SetAxis1Park (double value) |
| SetRAPark Set current AZ parking position. More... | |
| void | SetAxis1ParkDefault (double steps) |
| SetAxis1Park Set default AZ parking position. More... | |
| virtual bool | SetCurrentPark () |
| SetCurrentPark Set current coordinates/encoders value as the desired parking position. More... | |
| virtual bool | SetDefaultPark () |
| SetDefaultPark Set default coordinates/encoders value as the desired parking position. More... | |
| char * | LoadParkData () |
| bool | WriteParkData () |
| bool | GetTargetAz (double &Az, double &Alt, double &minAz, double &maxAz) |
| GetTargetAz. More... | |
| bool | Intersection (point3D p1, point3D p2, double r, double &mu1, double &mu2) |
| Intersection Calculate the intersection of a ray and a sphere. More... | |
| bool | OpticalCenter (point3D MountCenter, double dOpticalAxis, double Lat, double Ah, point3D &OP) |
| OpticalCenter This function calculates the distance from the optical axis to the Dome center. More... | |
| bool | OpticalVector (double Az, double Alt, point3D &OV) |
| OpticalVector This function calculates a second point for determining the optical axis. More... | |
| bool | CheckHorizon (double HA, double dec, double lat) |
| CheckHorizon Returns true if telescope points above horizon. More... | |
| virtual bool | saveConfigItems (FILE *fp) |
| saveConfigItems Saves the Device Port and Dome Presets in the configuration file More... | |
| void | UpdateMountCoords () |
| updateCoords updates the horizontal coordinates (Az & Alt) of the mount from the snooped RA, DEC and observer's location. More... | |
| virtual void | UpdateAutoSync () |
| UpdateAutoSync This function calculates the target dome azimuth from the mount's target coordinates given the dome parameters. More... | |
| virtual bool | Handshake () |
| perform handshake with device to check communication More... | |
| double | Csc (double x) |
| double | Sec (double x) |
| virtual bool | SetSpeed (double rpm) |
| SetSpeed Set Dome speed. More... | |
| virtual IPState | Move (DomeDirection dir, DomeMotionCommand operation) |
| Move the Dome in a particular direction. More... | |
| virtual IPState | MoveAbs (double az) |
| Move the Dome to an absolute azimuth. More... | |
| virtual IPState | MoveRel (double azDiff) |
| Move the Dome to an relative position. More... | |
| virtual bool | Abort () |
| Abort all dome motion. More... | |
| virtual IPState | Park () |
| Goto Park Position. More... | |
| virtual IPState | UnPark () |
| UnPark dome. More... | |
| virtual IPState | ControlShutter (ShutterOperation operation) |
| Open or Close shutter. More... | |
| const char * | GetShutterStatusString (ShutterStatus status) |
| getShutterStatusString More... | |
| void | SetParkDataType (DomeParkData type) |
| setParkDataType Sets the type of parking data stored in the park data file and presented to the user. More... | |
| bool | InitPark () |
| InitPark Loads parking data (stored in ~/.indi/ParkData.xml) that contains parking status and parking position. More... | |
| bool | isParked () |
| isParked is dome currently parked? More... | |
| void | SetParked (bool isparked) |
| SetParked Change the mount parking status. More... | |
| double | GetAxis1Park () |
| double | GetAxis1ParkDefault () |
| void | SetAxis1Park (double value) |
| SetRAPark Set current AZ parking position. More... | |
| void | SetAxis1ParkDefault (double steps) |
| SetAxis1Park Set default AZ parking position. More... | |
| virtual bool | SetCurrentPark () |
| SetCurrentPark Set current coordinates/encoders value as the desired parking position. More... | |
| virtual bool | SetDefaultPark () |
| SetDefaultPark Set default coordinates/encoders value as the desired parking position. More... | |
| char * | LoadParkData () |
| bool | WriteParkData () |
| bool | GetTargetAz (double &Az, double &Alt, double &minAz, double &maxAz) |
| GetTargetAz. More... | |
| bool | Intersection (point3D p1, point3D p2, double r, double &mu1, double &mu2) |
| Intersection Calculate the intersection of a ray and a sphere. More... | |
| bool | OpticalCenter (point3D MountCenter, double dOpticalAxis, double Lat, double Ah, point3D &OP) |
| OpticalCenter This function calculates the distance from the optical axis to the Dome center. More... | |
| bool | OpticalVector (double Az, double Alt, point3D &OV) |
| OpticalVector This function calculates a second point for determining the optical axis. More... | |
| bool | CheckHorizon (double HA, double dec, double lat) |
| CheckHorizon Returns true if telescope points above horizon. More... | |
| virtual bool | saveConfigItems (FILE *fp) |
| saveConfigItems Saves the Device Port and Dome Presets in the configuration file More... | |
| void | UpdateMountCoords () |
| updateCoords updates the horizontal coordinates (Az & Alt) of the mount from the snooped RA, DEC and observer's location. More... | |
| virtual void | UpdateAutoSync () |
| UpdateAutoSync This function calculates the target dome azimuth from the mount's target coordinates given the dome parameters. More... | |
| virtual bool | Handshake () |
| perform handshake with device to check communication More... | |
| double | Csc (double x) |
| double | Sec (double x) |
| Protected Member Functions inherited from INDI::DefaultDevice | |
| void | setDynamicPropertiesBehavior (bool defineEnabled, bool deleteEnabled) |
| setDynamicPropertiesBehavior controls handling of dynamic properties. More... | |
| virtual bool | loadConfig (bool silent=false, const char *property=nullptr) |
| Load the last saved configuration file. More... | |
| virtual bool | saveConfig (bool silent=false, const char *property=nullptr) |
| Save the current properties in a configuration file. More... | |
| virtual bool | saveAllConfigItems (FILE *fp) |
| saveAllConfigItems Save all the drivers' properties in the configuration file More... | |
| virtual bool | loadDefaultConfig () |
| Load the default configuration file. More... | |
| void | setDebug (bool enable) |
| Toggle driver debug status A driver can be more verbose if Debug option is enabled by the client. More... | |
| void | setSimulation (bool enable) |
| Toggle driver simulation status A driver can run in simulation mode if Simulation option is enabled by the client. More... | |
| virtual void | debugTriggered (bool enable) |
| Inform driver that the debug option was triggered. More... | |
| virtual void | simulationTriggered (bool enable) |
| Inform driver that the simulation option was triggered. More... | |
| bool | isDebug () |
| bool | isSimulation () |
| virtual bool | Connect () |
| Connect to the device. More... | |
| virtual bool | Disconnect () |
| Disconnect from device. More... | |
| void | registerConnection (Connection::Interface *newConnection) |
| registerConnection Add new connection plugin to the existing connection pool. More... | |
| bool | unRegisterConnection (Connection::Interface *existingConnection) |
| unRegisterConnection Remove connection from existing pool More... | |
| Connection::Interface * | getActiveConnection () |
| void | setDefaultPollingPeriod (uint32_t period) |
| uint32_t | getPollingPeriod () |
| virtual const char * | getDefaultName ()=0 |
| void | setDynamicPropertiesBehavior (bool defineEnabled, bool deleteEnabled) |
| setDynamicPropertiesBehavior controls handling of dynamic properties. More... | |
| virtual bool | loadConfig (bool silent=false, const char *property=nullptr) |
| Load the last saved configuration file. More... | |
| virtual bool | saveConfig (bool silent=false, const char *property=nullptr) |
| Save the current properties in a configuration file. More... | |
| virtual bool | saveAllConfigItems (FILE *fp) |
| saveAllConfigItems Save all the drivers' properties in the configuration file More... | |
| virtual bool | loadDefaultConfig () |
| Load the default configuration file. More... | |
| void | setDebug (bool enable) |
| Toggle driver debug status A driver can be more verbose if Debug option is enabled by the client. More... | |
| void | setSimulation (bool enable) |
| Toggle driver simulation status A driver can run in simulation mode if Simulation option is enabled by the client. More... | |
| virtual void | debugTriggered (bool enable) |
| Inform driver that the debug option was triggered. More... | |
| virtual void | simulationTriggered (bool enable) |
| Inform driver that the simulation option was triggered. More... | |
| bool | isDebug () |
| bool | isSimulation () |
| virtual bool | Connect () |
| Connect to the device. More... | |
| virtual bool | Disconnect () |
| Disconnect from device. More... | |
| void | registerConnection (Connection::Interface *newConnection) |
| registerConnection Add new connection plugin to the existing connection pool. More... | |
| bool | unRegisterConnection (Connection::Interface *existingConnection) |
| unRegisterConnection Remove connection from existing pool More... | |
| Connection::Interface * | getActiveConnection () |
| void | setDefaultPollingPeriod (uint32_t period) |
| uint32_t | getPollingPeriod () |
| virtual const char * | getDefaultName ()=0 |
| Protected Member Functions inherited from INDI::BaseDevice | |
| int | buildProp (XMLEle *root, char *errmsg) |
| Build a property given the supplied XML element (defXXX) More... | |
| int | setValue (XMLEle *root, char *errmsg) |
| handle SetXXX commands from client More... | |
| int | setBLOB (IBLOBVectorProperty *pp, XMLEle *root, char *errmsg) |
| Parse and store BLOB in the respective vector. More... | |
| int | buildProp (XMLEle *root, char *errmsg) |
| Build a property given the supplied XML element (defXXX) More... | |
| int | setValue (XMLEle *root, char *errmsg) |
| handle SetXXX commands from client More... | |
| int | setBLOB (IBLOBVectorProperty *pp, XMLEle *root, char *errmsg) |
| Parse and store BLOB in the respective vector. More... | |
Private Member Functions | |
| void | processButton (const char *button_n, ISState state) |
| void | triggerSnoop (const char *driverName, const char *propertyName) |
| bool | callHandshake () |
| void | processButton (const char *button_n, ISState state) |
| void | triggerSnoop (const char *driverName, const char *propertyName) |
| bool | callHandshake () |
Private Attributes | |
| Controller * | controller = nullptr |
| bool | IsParked = false |
| bool | IsMountParked = false |
| bool | IsLocked = true |
| const char * | ParkDeviceName |
| const char * | Parkdatafile |
| XMLEle * | ParkdataXmlRoot |
| XMLEle * | ParkdeviceXml |
| XMLEle * | ParkstatusXml |
| XMLEle * | ParkpositionXml |
| XMLEle * | ParkpositionAxis1Xml |
| double | Axis1ParkPosition |
| double | Axis1DefaultParkPosition |
| uint8_t | domeConnection = CONNECTION_SERIAL | CONNECTION_TCP |
Detailed Description
Class to provide general functionality of a Dome device.
Both relative and absolute position domes are supported. Furthermore, if no position feedback is available from the dome, an open-loop control is possible with simple direction commands (Clockwise and counter clockwise).
Before using any of the dome functions, you must define the capabilities of the dome by calling SetDomeCapability() function. All positions are represented as degrees of azimuth.
Relative motion is specified in degrees as either positive (clock wise direction), or negative (counter clock-wise direction).
Slaving is used to synchronizes the dome's azimuth position with that of the mount. The mount's coordinates are snooped from the active mount that has its name specified in ACTIVE_TELESCOPE property in the ACTIVE_DEVICES vector. Dome motion begins when it receives TARGET_EOD_COORD property from the mount driver when the mount starts slewing to the desired target coordinates /em OR when the mount's current tracking position exceeds the AutoSync threshold. Therefore, slaving is performed while slewing and tracking. The user is required to fill in all required parameters before slaving can be used. The AutoSync threshold is the difference in degrees between the dome's azimuth angle and the mount's azimuth angle that should trigger a dome motion. By default, it is set to 0.5 degrees which would trigger dome motion due to any difference between the dome and mount azimuth angles that exceeds 0.5 degrees. For example, if the threshold is set to 5 degrees, the dome will only start moving to sync with the mount's azimuth angle once the difference in azimuth angles is equal or exceeds 5 degrees.
Custom parking position is available for absolute/relative position domes.
For roll-off observatories, parking state reflects whether the roof is closed or open.
Developers need to subclass INDI::Dome to implement any driver for Domes within INDI.
- Note
- The code used calculate dome target AZ and ZD is written by Ferran Casarramona, and adapted from code from Markus Wildi. The transformations are based on the paper Matrix Method for Coodinates Transformation written by Toshimi Taki (http://www.asahi-net.or.jp/~zs3t-tk).
Member Enumeration Documentation
◆ anonymous enum
| anonymous enum |
◆ anonymous enum
| anonymous enum |
◆ anonymous enum
| anonymous enum |
◆ anonymous enum
| anonymous enum |
◆ DomeDirection [1/2]
◆ DomeDirection [2/2]
◆ DomeMeasurements [1/2]
Measurements necessary for dome-slit synchronization.
All values are in meters. The displacements are measured from the true dome centre, and the dome is assumed spherical.
- Note
- : The mount centre is the point where RA and Dec. axis crosses, no matter the kind of mount. For example, for a fork mount this displacement is typically 0 if it's perfectly centred with RA axis.
| Enumerator | |
|---|---|
| DM_DOME_RADIUS | Dome RADIUS |
| DM_SHUTTER_WIDTH | Shutter width |
| DM_NORTH_DISPLACEMENT | Displacement to north of the mount center |
| DM_EAST_DISPLACEMENT | Displacement to east of the mount center |
| DM_UP_DISPLACEMENT | Up Displacement of the mount center |
| DM_OTA_OFFSET | Distance from the optical axis to the mount center |
| DM_DOME_RADIUS | Dome RADIUS |
| DM_SHUTTER_WIDTH | Shutter width |
| DM_NORTH_DISPLACEMENT | Displacement to north of the mount center |
| DM_EAST_DISPLACEMENT | Displacement to east of the mount center |
| DM_UP_DISPLACEMENT | Up Displacement of the mount center |
| DM_OTA_OFFSET | Distance from the optical axis to the mount center |
◆ DomeMeasurements [2/2]
| Enumerator | |
|---|---|
| DM_DOME_RADIUS | Dome RADIUS |
| DM_SHUTTER_WIDTH | Shutter width |
| DM_NORTH_DISPLACEMENT | Displacement to north of the mount center |
| DM_EAST_DISPLACEMENT | Displacement to east of the mount center |
| DM_UP_DISPLACEMENT | Up Displacement of the mount center |
| DM_OTA_OFFSET | Distance from the optical axis to the mount center |
| DM_DOME_RADIUS | Dome RADIUS |
| DM_SHUTTER_WIDTH | Shutter width |
| DM_NORTH_DISPLACEMENT | Displacement to north of the mount center |
| DM_EAST_DISPLACEMENT | Displacement to east of the mount center |
| DM_UP_DISPLACEMENT | Up Displacement of the mount center |
| DM_OTA_OFFSET | Distance from the optical axis to the mount center |
◆ DomeMotionCommand [1/2]
◆ DomeMotionCommand [2/2]
◆ DomeParkData [1/2]
Dome Parking data type enum
◆ DomeParkData [2/2]
Dome Parking data type enum
◆ DomeState [1/2]
| enum Dome::DomeState |
Dome status.
| Enumerator | |
|---|---|
| DOME_IDLE | Dome is idle |
| DOME_MOVING | Dome is in motion |
| DOME_SYNCED | Dome is synced |
| DOME_PARKING | Dome is parking |
| DOME_UNPARKING | Dome is unparking |
| DOME_PARKED | Dome is parked |
| DOME_UNPARKED | Dome is unparked |
| DOME_IDLE | Dome is idle |
| DOME_MOVING | Dome is in motion |
| DOME_SYNCED | Dome is synced |
| DOME_PARKING | Dome is parking |
| DOME_UNPARKING | Dome is unparking |
| DOME_PARKED | Dome is parked |
| DOME_UNPARKED | Dome is unparked |
◆ DomeState [2/2]
| Enumerator | |
|---|---|
| DOME_IDLE | Dome is idle |
| DOME_MOVING | Dome is in motion |
| DOME_SYNCED | Dome is synced |
| DOME_PARKING | Dome is parking |
| DOME_UNPARKING | Dome is unparking |
| DOME_PARKED | Dome is parked |
| DOME_UNPARKED | Dome is unparked |
| DOME_IDLE | Dome is idle |
| DOME_MOVING | Dome is in motion |
| DOME_SYNCED | Dome is synced |
| DOME_PARKING | Dome is parking |
| DOME_UNPARKING | Dome is unparking |
| DOME_PARKED | Dome is parked |
| DOME_UNPARKED | Dome is unparked |
◆ ShutterOperation [1/2]
◆ ShutterOperation [2/2]
◆ ShutterStatus [1/2]
| enum Dome::ShutterStatus |
Shutter Status.
◆ ShutterStatus [2/2]
Constructor & Destructor Documentation
◆ Dome() [1/2]
| Dome::Dome | ( | ) |
◆ ~Dome() [1/2]
|
virtual |
◆ Dome() [2/2]
| INDI::Dome::Dome | ( | ) |
◆ ~Dome() [2/2]
|
virtual |
Member Function Documentation
◆ Abort() [1/2]
|
protectedvirtual |
Abort all dome motion.
- Returns
- True if abort is successful, false otherwise.
Reimplemented in NexDome, BaaderDome, MaxDomeII, DomeSim, DomeScript, and RollOff.
◆ Abort() [2/2]
|
protectedvirtual |
Abort all dome motion.
- Returns
- True if abort is successful, false otherwise.
Reimplemented in NexDome, BaaderDome, MaxDomeII, DomeSim, DomeScript, and RollOff.
◆ buttonHelper() [1/2]
|
static |
◆ buttonHelper() [2/2]
◆ callHandshake() [1/2]
|
private |
◆ callHandshake() [2/2]
|
private |
◆ CanAbort() [1/2]
|
inline |
- Returns
- True if dome support aborting motion
◆ CanAbort() [2/2]
|
inline |
- Returns
- True if dome support aborting motion
◆ CanAbsMove() [1/2]
|
inline |
- Returns
- True if dome has absolute postion encoders.
◆ CanAbsMove() [2/2]
|
inline |
- Returns
- True if dome has absolute postion encoders.
◆ CanPark() [1/2]
|
inline |
- Returns
- True if dome can park.
◆ CanPark() [2/2]
|
inline |
- Returns
- True if dome can park.
◆ CanRelMove() [1/2]
|
inline |
- Returns
- True if dome has relative position encoders.
◆ CanRelMove() [2/2]
|
inline |
- Returns
- True if dome has relative position encoders.
◆ CheckHorizon() [1/2]
|
protected |
CheckHorizon Returns true if telescope points above horizon.
- Parameters
-
HA Hour angle dec Declination lat observer's latitude
- Returns
- True if telescope points above horizon, false otherwise.
◆ CheckHorizon() [2/2]
|
protected |
CheckHorizon Returns true if telescope points above horizon.
- Parameters
-
HA Hour angle dec Declination lat observer's latitude
- Returns
- True if telescope points above horizon, false otherwise.
◆ ControlShutter() [1/2]
|
protectedvirtual |
Open or Close shutter.
- Parameters
-
operation Either open or close the shutter.
- Returns
- Return IPS_OK if shutter operation is complete. Return IPS_BUSY if shutter operation is in progress. Return IPS_ALERT if there is an error.
Reimplemented in NexDome, MaxDomeII, BaaderDome, DomeSim, and DomeScript.
◆ ControlShutter() [2/2]
|
protectedvirtual |
Open or Close shutter.
- Parameters
-
operation Either open or close the shutter.
- Returns
- Return IPS_OK if shutter operation is complete. Return IPS_BUSY if shutter operation is in progress. Return IPS_ALERT if there is an error.
Reimplemented in NexDome, MaxDomeII, BaaderDome, DomeSim, and DomeScript.
◆ Csc() [1/2]
|
protected |
◆ Csc() [2/2]
|
protected |
◆ GetAxis1Park() [1/2]
|
protected |
- Returns
- Get current AZ parking position.
◆ GetAxis1Park() [2/2]
|
protected |
- Returns
- Get current AZ parking position.
◆ GetAxis1ParkDefault() [1/2]
|
protected |
- Returns
- Get default AZ parking position.
◆ GetAxis1ParkDefault() [2/2]
|
protected |
- Returns
- Get default AZ parking position.
◆ GetDomeCapability() [1/2]
|
inline |
GetDomeCapability returns the capability of the dome.
◆ GetDomeCapability() [2/2]
|
inline |
GetDomeCapability returns the capability of the dome.
◆ getDomeConnection() [1/2]
◆ getDomeConnection() [2/2]
◆ getDomeState() [1/2]
| DomeState INDI::Dome::getDomeState | ( | ) | const |
◆ getDomeState() [2/2]
| DomeState INDI::Dome::getDomeState | ( | ) | const |
◆ getMountState() [1/2]
| IPState INDI::Dome::getMountState | ( | ) | const |
◆ getMountState() [2/2]
| IPState Dome::getMountState | ( | ) | const |
◆ GetShutterStatusString() [1/2]
|
protected |
getShutterStatusString
- Parameters
-
status Status of shutter
- Returns
- Returns string representation of the shutter status
◆ GetShutterStatusString() [2/2]
|
protected |
getShutterStatusString
- Parameters
-
status Status of shutter
- Returns
- Returns string representation of the shutter status
◆ GetTargetAz() [1/2]
|
protected |
GetTargetAz.
- Parameters
-
Az Returns Azimuth required to the dome in order to center the shutter aperture with telescope Alt minAz Returns Minimum azimuth in order to avoid any dome interference to the full aperture of the telescope maxAz Returns Maximum azimuth in order to avoid any dome interference to the full aperture of the telescope
- Returns
- Returns false if it can't solve it due bad geometry of the observatory
◆ GetTargetAz() [2/2]
|
protected |
GetTargetAz.
- Parameters
-
Az Returns Azimuth required to the dome in order to center the shutter aperture with telescope Alt minAz Returns Minimum azimuth in order to avoid any dome interference to the full aperture of the telescope maxAz Returns Maximum azimuth in order to avoid any dome interference to the full aperture of the telescope
- Returns
- Returns false if it can't solve it due bad geometry of the observatory
◆ getWeatherState() [1/2]
| IPState INDI::Dome::getWeatherState | ( | ) | const |
◆ getWeatherState() [2/2]
| IPState Dome::getWeatherState | ( | ) | const |
◆ Handshake() [1/2]
|
protectedvirtual |
perform handshake with device to check communication
Reimplemented in NexDome, BaaderDome, and MaxDomeII.
◆ Handshake() [2/2]
|
protectedvirtual |
perform handshake with device to check communication
Reimplemented in NexDome, BaaderDome, and MaxDomeII.
◆ HasShutter() [1/2]
|
inline |
- Returns
- True if dome has controllable shutter door
◆ HasShutter() [2/2]
|
inline |
- Returns
- True if dome has controllable shutter door
◆ HasVariableSpeed() [1/2]
|
inline |
- Returns
- True if dome support multiple speeds
◆ HasVariableSpeed() [2/2]
|
inline |
- Returns
- True if dome support multiple speeds
◆ InitPark() [1/2]
|
protected |
InitPark Loads parking data (stored in ~/.indi/ParkData.xml) that contains parking status and parking position.
InitPark() should be called after successful connection to the dome on startup.
- Returns
- True if loading is successful and data is read, false otherwise. On success, you must call SetAzParkDefault() to set the default parking values. On failure, you must call SetAzParkDefault() to set the default parking values in addition to SetAzPark() to set the current parking position.
◆ InitPark() [2/2]
|
protected |
InitPark Loads parking data (stored in ~/.indi/ParkData.xml) that contains parking status and parking position.
InitPark() should be called after successful connection to the dome on startup.
- Returns
- True if loading is successful and data is read, false otherwise. On success, you must call SetAzParkDefault() to set the default parking values. On failure, you must call SetAzParkDefault() to set the default parking values in addition to SetAzPark() to set the current parking position.
◆ initProperties() [1/2]
|
virtual |
Initilize properties initial state and value.
The child class must implement this function.
- Returns
- True if initilization is successful, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, MaxDomeII, DomeSim, NexDome, DomeScript, and RollOff.
◆ initProperties() [2/2]
|
virtual |
Initilize properties initial state and value.
The child class must implement this function.
- Returns
- True if initilization is successful, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, MaxDomeII, DomeSim, NexDome, DomeScript, and RollOff.
◆ Intersection() [1/2]
Intersection Calculate the intersection of a ray and a sphere.
The line segment is defined from p1 to p2. The sphere is of radius r and centered at (0,0,0). From http://local.wasp.uwa.edu.au/~pbourke/geometry/sphereline/ There are potentially two points of intersection given by p := p1 + mu1 (p2 - p1) p := p1 + mu2 (p2 - p1)
- Parameters
-
p1 First point p2 Direction of the ray r RADIUS of sphere mu1 First point of potentional intersection. mu2 Second point of potentional intersection.
- Returns
- Returns FALSE if the ray doesn't intersect the sphere.
◆ Intersection() [2/2]
|
protected |
Intersection Calculate the intersection of a ray and a sphere.
The line segment is defined from p1 to p2. The sphere is of radius r and centered at (0,0,0). From http://local.wasp.uwa.edu.au/~pbourke/geometry/sphereline/ There are potentially two points of intersection given by p := p1 + mu1 (p2 - p1) p := p1 + mu2 (p2 - p1)
- Parameters
-
p1 First point p2 Direction of the ray r RADIUS of sphere mu1 First point of potentional intersection. mu2 Second point of potentional intersection.
- Returns
- Returns FALSE if the ray doesn't intersect the sphere.
◆ ISGetProperties() [1/2]
|
virtual |
define the driver's properties to the client.
Usually, only a minimum set of properties are defined to the client in this function if the device is in disconnected state. Those properties should be enough to enable the client to establish a connection to the device. In addition to CONNECT/DISCONNECT, such properties may include port name, IP address, etc. You should check if the device is already connected, and if this is true, then you must define the remainder of the the properties to the client in this function. Otherwise, the remainder of the driver's properties are defined to the client in updateProperties() function which is called when a client connects/disconnects from a device.
- Parameters
-
dev name of the device
- Note
- This function is called by the INDI framework, do not call it directly. See LX200 Generic driver for an example implementation
Reimplemented from INDI::DefaultDevice.
Reimplemented in DomeScript.
◆ ISGetProperties() [2/2]
|
virtual |
define the driver's properties to the client.
Usually, only a minimum set of properties are defined to the client in this function if the device is in disconnected state. Those properties should be enough to enable the client to establish a connection to the device. In addition to CONNECT/DISCONNECT, such properties may include port name, IP address, etc. You should check if the device is already connected, and if this is true, then you must define the remainder of the the properties to the client in this function. Otherwise, the remainder of the driver's properties are defined to the client in updateProperties() function which is called when a client connects/disconnects from a device.
- Parameters
-
dev name of the device
- Note
- This function is called by the INDI framework, do not call it directly. See LX200 Generic driver for an example implementation
Reimplemented from INDI::DefaultDevice.
Reimplemented in DomeScript.
◆ isLocked() [1/2]
| bool INDI::Dome::isLocked | ( | ) |
isLocked, is the dome currently locked?
- Returns
- True if lock status equals true, and TelescopeClosedLockTP is Telescope Locks.
◆ isLocked() [2/2]
| bool Dome::isLocked | ( | ) |
isLocked, is the dome currently locked?
- Returns
- True if lock status equals true, and TelescopeClosedLockTP is Telescope Locks.
◆ ISNewNumber() [1/2]
|
virtual |
Process the client newNumber command.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
◆ ISNewNumber() [2/2]
|
virtual |
Process the client newNumber command.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
◆ ISNewSwitch() [1/2]
|
virtual |
Process the client newSwitch command.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, MaxDomeII, NexDome, and RollOff.
◆ ISNewSwitch() [2/2]
|
virtual |
Process the client newSwitch command.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, MaxDomeII, NexDome, and RollOff.
◆ ISNewText() [1/2]
|
virtual |
Process the client newSwitch command.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in DomeScript.
◆ ISNewText() [2/2]
|
virtual |
Process the client newSwitch command.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in DomeScript.
◆ isParked() [1/2]
|
protected |
isParked is dome currently parked?
- Returns
- True if parked, false otherwise.
◆ isParked() [2/2]
|
protected |
isParked is dome currently parked?
- Returns
- True if parked, false otherwise.
◆ ISSnoopDevice() [1/2]
Process a snoop event from INDI server.
This function is called when a snooped property is updated in a snooped driver.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in RollOff.
◆ ISSnoopDevice() [2/2]
Process a snoop event from INDI server.
This function is called when a snooped property is updated in a snooped driver.
- Note
- This function is called by the INDI framework, do not call it directly.
- Returns
- True if any property was successfully processed, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in RollOff.
◆ LoadParkData() [1/2]
|
protected |
◆ LoadParkData() [2/2]
|
protected |
◆ Move() [1/2]
|
protectedvirtual |
◆ Move() [2/2]
|
protectedvirtual |
◆ MoveAbs() [1/2]
|
protectedvirtual |
Move the Dome to an absolute azimuth.
- Parameters
-
az The new position of the Dome.
- Returns
- Return IPS_OK if motion is completed and Dome reached requested position. Return IPS_BUSY if Dome started motion to requested position and is in progress. Return IPS_ALERT if there is an error.
Reimplemented in NexDome, BaaderDome, MaxDomeII, DomeSim, and DomeScript.
◆ MoveAbs() [2/2]
|
protectedvirtual |
Move the Dome to an absolute azimuth.
- Parameters
-
az The new position of the Dome.
- Returns
- Return IPS_OK if motion is completed and Dome reached requested position. Return IPS_BUSY if Dome started motion to requested position and is in progress. Return IPS_ALERT if there is an error.
Reimplemented in NexDome, BaaderDome, MaxDomeII, DomeSim, and DomeScript.
◆ MoveRel() [1/2]
|
protectedvirtual |
Move the Dome to an relative position.
- Parameters
-
azDiff The relative azimuth angle to move. Positive degree is clock-wise direction. Negative degrees is counter clock-wise direction.
- Returns
- Return IPS_OK if motion is completed and Dome reached requested position. Return IPS_BUSY if Dome started motion to requested position and is in progress. Return IPS_ALERT if there is an error.
Reimplemented in BaaderDome, and DomeSim.
◆ MoveRel() [2/2]
|
protectedvirtual |
Move the Dome to an relative position.
- Parameters
-
azDiff The relative azimuth angle to move. Positive degree is clock-wise direction. Negative degrees is counter clock-wise direction.
- Returns
- Return IPS_OK if motion is completed and Dome reached requested position. Return IPS_BUSY if Dome started motion to requested position and is in progress. Return IPS_ALERT if there is an error.
Reimplemented in BaaderDome, and DomeSim.
◆ OpticalCenter() [1/2]
|
protected |
OpticalCenter This function calculates the distance from the optical axis to the Dome center.
- Parameters
-
MountCenter Distance from the Dome center to the point where mount axis crosses dOpticalAxis Distance from the mount center to the optical axis. Lat Latitude Ah Hour Angle (in hours) OP a 3D point from the optical center to the Dome center.
- Returns
- false in case of error.
◆ OpticalCenter() [2/2]
|
protected |
OpticalCenter This function calculates the distance from the optical axis to the Dome center.
- Parameters
-
MountCenter Distance from the Dome center to the point where mount axis crosses dOpticalAxis Distance from the mount center to the optical axis. Lat Latitude Ah Hour Angle (in hours) OP a 3D point from the optical center to the Dome center.
- Returns
- false in case of error.
◆ OpticalVector() [1/2]
OpticalVector This function calculates a second point for determining the optical axis.
- Parameters
-
Az Azimuth Alt Altitude OV a 3D point that determines the optical line.
- Returns
- false in case of error.
◆ OpticalVector() [2/2]
OpticalVector This function calculates a second point for determining the optical axis.
- Parameters
-
Az Azimuth Alt Altitude OV a 3D point that determines the optical line.
- Returns
- false in case of error.
◆ Park() [1/2]
|
protectedvirtual |
Goto Park Position.
The park position is an absolute azimuth value.
- Returns
- Return IPS_OK if motion is completed and Dome reached park position. Return IPS_BUSY if Dome started motion to park requested position and is in progress. Return -IPS_ALERT if there is an error.
Reimplemented in NexDome, BaaderDome, DomeSim, DomeScript, and RollOff.
◆ Park() [2/2]
|
protectedvirtual |
Goto Park Position.
The park position is an absolute azimuth value.
- Returns
- Return IPS_OK if motion is completed and Dome reached park position. Return IPS_BUSY if Dome started motion to park requested position and is in progress. Return -IPS_ALERT if there is an error.
Reimplemented in NexDome, BaaderDome, DomeSim, DomeScript, and RollOff.
◆ processButton() [1/2]
◆ processButton() [2/2]
◆ saveConfigItems() [1/2]
|
protectedvirtual |
saveConfigItems Saves the Device Port and Dome Presets in the configuration file
- Parameters
-
fp pointer to configuration file
- Returns
- true if successful, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, MaxDomeII, RollOff, and DomeScript.
◆ saveConfigItems() [2/2]
|
protectedvirtual |
saveConfigItems Saves the Device Port and Dome Presets in the configuration file
- Parameters
-
fp pointer to configuration file
- Returns
- true if successful, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, MaxDomeII, RollOff, and DomeScript.
◆ Sec() [1/2]
|
protected |
◆ Sec() [2/2]
|
protected |
◆ SetAxis1Park() [1/2]
|
protected |
SetRAPark Set current AZ parking position.
The data park file (stored in ~/.indi/ParkData.xml) is updated in the process.
- Parameters
-
value current Axis 1 value (AZ either in angles or encoder values as specificed by the DomeParkData type).
◆ SetAxis1Park() [2/2]
|
protected |
SetRAPark Set current AZ parking position.
The data park file (stored in ~/.indi/ParkData.xml) is updated in the process.
- Parameters
-
value current Axis 1 value (AZ either in angles or encoder values as specificed by the DomeParkData type).
◆ SetAxis1ParkDefault() [1/2]
|
protected |
SetAxis1Park Set default AZ parking position.
- Parameters
-
value Default Axis 1 value (AZ either in angles or encoder values as specificed by the DomeParkData type).
◆ SetAxis1ParkDefault() [2/2]
|
protected |
SetAxis1Park Set default AZ parking position.
- Parameters
-
value Default Axis 1 value (AZ either in angles or encoder values as specificed by the DomeParkData type).
◆ SetCurrentPark() [1/2]
|
protectedvirtual |
SetCurrentPark Set current coordinates/encoders value as the desired parking position.
- Note
- This function performs no action unless subclassed by the child class if required.
Reimplemented in NexDome, BaaderDome, MaxDomeII, and DomeSim.
◆ SetCurrentPark() [2/2]
|
protectedvirtual |
SetCurrentPark Set current coordinates/encoders value as the desired parking position.
- Note
- This function performs no action unless subclassed by the child class if required.
Reimplemented in NexDome, BaaderDome, MaxDomeII, and DomeSim.
◆ SetDefaultPark() [1/2]
|
protectedvirtual |
SetDefaultPark Set default coordinates/encoders value as the desired parking position.
- Note
- This function performs no action unless subclassed by the child class if required.
Reimplemented in NexDome, BaaderDome, MaxDomeII, and DomeSim.
◆ SetDefaultPark() [2/2]
|
protectedvirtual |
SetDefaultPark Set default coordinates/encoders value as the desired parking position.
- Note
- This function performs no action unless subclassed by the child class if required.
Reimplemented in NexDome, BaaderDome, MaxDomeII, and DomeSim.
◆ SetDomeCapability() [1/2]
| void Dome::SetDomeCapability | ( | uint32_t | cap | ) |
SetDomeCapability set the dome capabilities.
All capabilities must be initialized.
- Parameters
-
cap pointer to dome capability
◆ SetDomeCapability() [2/2]
| void INDI::Dome::SetDomeCapability | ( | uint32_t | cap | ) |
SetDomeCapability set the dome capabilities.
All capabilities must be initialized.
- Parameters
-
cap pointer to dome capability
◆ setDomeConnection() [1/2]
setDomeConnection Set Dome connection mode.
Child class should call this in the constructor before Dome registers any connection interfaces
- Parameters
-
value ORed combination of DomeConnection values.
◆ setDomeConnection() [2/2]
setDomeConnection Set Dome connection mode.
Child class should call this in the constructor before Dome registers any connection interfaces
- Parameters
-
value ORed combination of DomeConnection values.
◆ setDomeState() [1/2]
◆ setDomeState() [2/2]
◆ SetParkDataType() [1/2]
|
protected |
setParkDataType Sets the type of parking data stored in the park data file and presented to the user.
- Parameters
-
type parking data type. If PARK_NONE then no properties will be presented to the user for custom parking position.
◆ SetParkDataType() [2/2]
|
protected |
setParkDataType Sets the type of parking data stored in the park data file and presented to the user.
- Parameters
-
type parking data type. If PARK_NONE then no properties will be presented to the user for custom parking position.
◆ SetParked() [1/2]
|
protected |
SetParked Change the mount parking status.
The data park file (stored in ~/.indi/ParkData.xml) is updated in the process.
- Parameters
-
isparked set to true if parked, false otherwise.
◆ SetParked() [2/2]
|
protected |
SetParked Change the mount parking status.
The data park file (stored in ~/.indi/ParkData.xml) is updated in the process.
- Parameters
-
isparked set to true if parked, false otherwise.
◆ SetSpeed() [1/2]
|
protectedvirtual |
◆ SetSpeed() [2/2]
|
protectedvirtual |
◆ triggerSnoop() [1/2]
◆ triggerSnoop() [2/2]
◆ UnPark() [1/2]
|
protectedvirtual |
UnPark dome.
The action of the Unpark command is dome specific, but it may include opening the shutter and moving to home position. When UnPark() is successful The observatory should be in a ready state to utilize the mount to perform observations.
- Returns
- Return IPS_OK if motion is completed and Dome is unparked. Return IPS_BUSY if Dome unparking is in progress. Return -IPS_ALERT if there is an error.
Reimplemented in NexDome, BaaderDome, DomeSim, DomeScript, and RollOff.
◆ UnPark() [2/2]
|
protectedvirtual |
UnPark dome.
The action of the Unpark command is dome specific, but it may include opening the shutter and moving to home position. When UnPark() is successful The observatory should be in a ready state to utilize the mount to perform observations.
- Returns
- Return IPS_OK if motion is completed and Dome is unparked. Return IPS_BUSY if Dome unparking is in progress. Return -IPS_ALERT if there is an error.
Reimplemented in NexDome, BaaderDome, DomeSim, DomeScript, and RollOff.
◆ UpdateAutoSync() [1/2]
|
protectedvirtual |
UpdateAutoSync This function calculates the target dome azimuth from the mount's target coordinates given the dome parameters.
If the difference between the dome's and mount's azimuth angles exceeds the AutoSync threshold, the dome will be commanded to sync to the mount azimuth position.
◆ UpdateAutoSync() [2/2]
|
protectedvirtual |
UpdateAutoSync This function calculates the target dome azimuth from the mount's target coordinates given the dome parameters.
If the difference between the dome's and mount's azimuth angles exceeds the AutoSync threshold, the dome will be commanded to sync to the mount azimuth position.
◆ UpdateMountCoords() [1/2]
|
protected |
updateCoords updates the horizontal coordinates (Az & Alt) of the mount from the snooped RA, DEC and observer's location.
◆ UpdateMountCoords() [2/2]
|
protected |
updateCoords updates the horizontal coordinates (Az & Alt) of the mount from the snooped RA, DEC and observer's location.
◆ updateProperties() [1/2]
|
virtual |
updateProperties is called whenever there is a change in the CONNECTION status of the driver.
This will enable the driver to react to changes of switching ON/OFF a device. For example, a driver may only define a set of properties after a device is connected, but not before.
- Returns
- True if update is successful, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, DomeSim, MaxDomeII, NexDome, DomeScript, and RollOff.
◆ updateProperties() [2/2]
|
virtual |
updateProperties is called whenever there is a change in the CONNECTION status of the driver.
This will enable the driver to react to changes of switching ON/OFF a device. For example, a driver may only define a set of properties after a device is connected, but not before.
- Returns
- True if update is successful, false otherwise.
Reimplemented from INDI::DefaultDevice.
Reimplemented in BaaderDome, DomeSim, MaxDomeII, NexDome, DomeScript, and RollOff.
◆ WriteParkData() [1/2]
|
protected |
◆ WriteParkData() [2/2]
|
protected |
Member Data Documentation
◆ AbortS
|
protected |
◆ AbortSP
|
protected |
◆ ActiveDeviceT
|
protected |
◆ ActiveDeviceTP
|
protected |
◆ AutoParkS
|
protected |
◆ AutoParkSP
|
protected |
◆ Axis1DefaultParkPosition
|
private |
◆ Axis1ParkPosition
|
private |
◆ capability
|
protected |
◆ controller
|
private |
◆ DomeAbsPosN
|
protected |
◆ DomeAbsPosNP
|
protected |
◆ DomeAutoSyncS
|
protected |
◆ DomeAutoSyncSP
|
protected |
◆ DomeConnection [1/2]
| enum { ... } INDI::Dome::DomeConnection |
◆ DomeConnection [2/2]
| enum { ... } INDI::Dome::DomeConnection |
◆ domeConnection
|
private |
◆ DomeMeasurementsN
|
protected |
◆ DomeMeasurementsNP
|
protected |
◆ DomeMotionS
|
protected |
◆ DomeMotionSP
|
protected |
◆ DomeParamN
|
protected |
◆ DomeParamNP
|
protected |
◆ DomeRelPosN
|
protected |
◆ DomeRelPosNP
|
protected |
◆ DomeShutterS
|
protected |
◆ DomeShutterSP
|
protected |
◆ DomeSpeedN
|
protected |
◆ DomeSpeedNP
|
protected |
◆ domeState
|
protected |
◆ HaveLatLong
◆ HaveRaDec
◆ IsLocked
◆ IsMountParked
◆ IsParked
◆ mountEquatorialCoords
|
protected |
◆ mountHoriztonalCoords
|
protected |
◆ mountState
|
protected |
◆ observer
|
protected |
◆ OTASideS
|
protected |
◆ OTASideSP
|
protected |
◆ Parkdatafile
|
private |
◆ parkDataType
|
protected |
◆ ParkdataXmlRoot
|
private |
◆ ParkDeviceName
|
private |
◆ ParkdeviceXml
|
private |
◆ ParkOptionS
|
protected |
◆ ParkOptionSP
|
protected |
◆ ParkpositionAxis1Xml
|
private |
◆ ParkPositionN
|
protected |
◆ ParkPositionNP
|
protected |
◆ ParkpositionXml
|
private |
◆ ParkS
|
protected |
◆ ParkSP
|
protected |
◆ ParkstatusXml
|
private |
◆ PortFD
|
protected |
◆ PresetGotoS
|
protected |
◆ PresetGotoSP
|
protected |
◆ PresetN
|
protected |
◆ PresetNP
|
protected |
◆ prev_alt
|
protected |
◆ prev_az
|
protected |
◆ prev_dec
|
protected |
◆ prev_ra
|
protected |
◆ serialConnection
|
protected |
◆ shutterState
|
protected |
◆ tcpConnection
|
protected |
◆ TelescopeClosedLockT
|
protected |
◆ TelescopeClosedLockTP
|
protected |
◆ weatherState
|
protected |
The documentation for this class was generated from the following files:
- /home/nirva/insroot/include/libindi/indidome.h
- ln/3rdparty/src/indilib/indi-1.7.4/libindi/libs/indibase/indidome.cpp
