|
| | DomeSim () |
| |
| virtual | ~DomeSim ()=default |
| |
| virtual bool | initProperties () |
| | Initilize properties initial state and value. More...
|
| |
| const char * | getDefaultName () |
| |
| bool | updateProperties () |
| | updateProperties is called whenever there is a change in the CONNECTION status of the driver. More...
|
| |
| | Dome () |
| |
| virtual | ~Dome () |
| |
| virtual void | ISGetProperties (const char *dev) |
| | define the driver's properties to the client. More...
|
| |
| virtual bool | ISNewNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| | Process the client newNumber command. More...
|
| |
| virtual bool | ISNewSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| | Process the client newSwitch command. More...
|
| |
| virtual bool | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int n) |
| | Process the client newSwitch command. More...
|
| |
| virtual bool | ISSnoopDevice (XMLEle *root) |
| | Process a snoop event from INDI server. More...
|
| |
| void | setDomeConnection (const uint8_t &value) |
| | setDomeConnection Set Dome connection mode. More...
|
| |
| uint8_t | getDomeConnection () const |
| |
| uint32_t | GetDomeCapability () const |
| | GetDomeCapability returns the capability of the dome. More...
|
| |
| void | SetDomeCapability (uint32_t cap) |
| | SetDomeCapability set the dome capabilities. More...
|
| |
| bool | CanAbort () |
| |
| bool | CanAbsMove () |
| |
| bool | CanRelMove () |
| |
| bool | CanPark () |
| |
| bool | HasShutter () |
| |
| bool | HasVariableSpeed () |
| |
| bool | isLocked () |
| | isLocked, is the dome currently locked? More...
|
| |
| DomeState | getDomeState () const |
| |
| void | setDomeState (const DomeState &value) |
| |
| IPState | getWeatherState () const |
| |
| IPState | getMountState () const |
| |
| | Dome () |
| |
| virtual | ~Dome () |
| |
| virtual void | ISGetProperties (const char *dev) |
| | define the driver's properties to the client. More...
|
| |
| virtual bool | ISNewNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| | Process the client newNumber command. More...
|
| |
| virtual bool | ISNewSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| | Process the client newSwitch command. More...
|
| |
| virtual bool | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int n) |
| | Process the client newSwitch command. More...
|
| |
| virtual bool | ISSnoopDevice (XMLEle *root) |
| | Process a snoop event from INDI server. More...
|
| |
| void | setDomeConnection (const uint8_t &value) |
| | setDomeConnection Set Dome connection mode. More...
|
| |
| uint8_t | getDomeConnection () const |
| |
| uint32_t | GetDomeCapability () const |
| | GetDomeCapability returns the capability of the dome. More...
|
| |
| void | SetDomeCapability (uint32_t cap) |
| | SetDomeCapability set the dome capabilities. More...
|
| |
| bool | CanAbort () |
| |
| bool | CanAbsMove () |
| |
| bool | CanRelMove () |
| |
| bool | CanPark () |
| |
| bool | HasShutter () |
| |
| bool | HasVariableSpeed () |
| |
| bool | isLocked () |
| | isLocked, is the dome currently locked? More...
|
| |
| DomeState | getDomeState () const |
| |
| void | setDomeState (const DomeState &value) |
| |
| IPState | getWeatherState () const |
| |
| IPState | getMountState () const |
| |
| | DefaultDevice () |
| |
| virtual | ~DefaultDevice () |
| |
| void | addAuxControls () |
| | Add Debug, Simulation, and Configuration options to the driver. More...
|
| |
| void | addDebugControl () |
| | Add Debug control to the driver. More...
|
| |
| void | addSimulationControl () |
| | Add Simulation control to the driver. More...
|
| |
| void | addConfigurationControl () |
| | Add Configuration control to the driver. More...
|
| |
| void | addPollPeriodControl () |
| | Add Polling period control to the driver. More...
|
| |
| void | resetProperties () |
| | Set all properties to IDLE state. More...
|
| |
| void | defineNumber (INumberVectorProperty *nvp) |
| | Define number vector to client & register it. More...
|
| |
| void | defineText (ITextVectorProperty *tvp) |
| | Define text vector to client & register it. More...
|
| |
| void | defineSwitch (ISwitchVectorProperty *svp) |
| | Define switch vector to client & register it. More...
|
| |
| void | defineLight (ILightVectorProperty *lvp) |
| | Define light vector to client & register it. More...
|
| |
| void | defineBLOB (IBLOBVectorProperty *bvp) |
| | Define BLOB vector to client & register it. More...
|
| |
| virtual bool | deleteProperty (const char *propertyName) |
| | Delete a property and unregister it. More...
|
| |
| virtual void | setConnected (bool status, IPState state=IPS_OK, const char *msg=nullptr) |
| | Set connection switch status in the client. More...
|
| |
| int | SetTimer (uint32_t ms) |
| | Set a timer to call the function TimerHit after ms milliseconds. More...
|
| |
| void | RemoveTimer (int id) |
| | Remove timer added with SetTimer. More...
|
| |
| virtual const char * | getDriverExec () |
| |
| virtual const char * | getDriverName () |
| |
| void | setVersion (uint16_t vMajor, uint16_t vMinor) |
| | Set driver version information to be defined in DRIVER_INFO property as vMajor.vMinor. More...
|
| |
| uint16_t | getMajorVersion () |
| |
| uint16_t | getMinorVersion () |
| |
| virtual bool | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| | Process the client newBLOB command. More...
|
| |
| virtual uint16_t | getDriverInterface () |
| |
| void | setDriverInterface (uint16_t value) |
| | setInterface Set driver interface. More...
|
| |
| | DefaultDevice () |
| |
| virtual | ~DefaultDevice () |
| |
| void | addAuxControls () |
| | Add Debug, Simulation, and Configuration options to the driver. More...
|
| |
| void | addDebugControl () |
| | Add Debug control to the driver. More...
|
| |
| void | addSimulationControl () |
| | Add Simulation control to the driver. More...
|
| |
| void | addConfigurationControl () |
| | Add Configuration control to the driver. More...
|
| |
| void | addPollPeriodControl () |
| | Add Polling period control to the driver. More...
|
| |
| void | resetProperties () |
| | Set all properties to IDLE state. More...
|
| |
| void | defineNumber (INumberVectorProperty *nvp) |
| | Define number vector to client & register it. More...
|
| |
| void | defineText (ITextVectorProperty *tvp) |
| | Define text vector to client & register it. More...
|
| |
| void | defineSwitch (ISwitchVectorProperty *svp) |
| | Define switch vector to client & register it. More...
|
| |
| void | defineLight (ILightVectorProperty *lvp) |
| | Define light vector to client & register it. More...
|
| |
| void | defineBLOB (IBLOBVectorProperty *bvp) |
| | Define BLOB vector to client & register it. More...
|
| |
| virtual bool | deleteProperty (const char *propertyName) |
| | Delete a property and unregister it. More...
|
| |
| virtual void | setConnected (bool status, IPState state=IPS_OK, const char *msg=nullptr) |
| | Set connection switch status in the client. More...
|
| |
| int | SetTimer (uint32_t ms) |
| | Set a timer to call the function TimerHit after ms milliseconds. More...
|
| |
| void | RemoveTimer (int id) |
| | Remove timer added with SetTimer. More...
|
| |
| virtual const char * | getDriverExec () |
| |
| virtual const char * | getDriverName () |
| |
| void | setVersion (uint16_t vMajor, uint16_t vMinor) |
| | Set driver version information to be defined in DRIVER_INFO property as vMajor.vMinor. More...
|
| |
| uint16_t | getMajorVersion () |
| |
| uint16_t | getMinorVersion () |
| |
| virtual bool | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| | Process the client newBLOB command. More...
|
| |
| virtual uint16_t | getDriverInterface () |
| |
| void | setDriverInterface (uint16_t value) |
| | setInterface Set driver interface. More...
|
| |
| | BaseDevice () |
| |
| virtual | ~BaseDevice () |
| |
| INumberVectorProperty * | getNumber (const char *name) |
| |
| ITextVectorProperty * | getText (const char *name) |
| |
| ISwitchVectorProperty * | getSwitch (const char *name) |
| |
| ILightVectorProperty * | getLight (const char *name) |
| |
| IBLOBVectorProperty * | getBLOB (const char *name) |
| |
| IPState | getPropertyState (const char *name) |
| |
| IPerm | getPropertyPermission (const char *name) |
| |
| void | registerProperty (void *p, INDI_PROPERTY_TYPE type) |
| |
| int | removeProperty (const char *name, char *errmsg) |
| | Remove a property. More...
|
| |
| void * | getRawProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| INDI::Property * | getProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| std::vector< INDI::Property * > * | getProperties () |
| | Return a list of all properties in the device. More...
|
| |
| bool | buildSkeleton (const char *filename) |
| | Build driver properties from a skeleton file. More...
|
| |
| bool | isConnected () |
| |
| void | setDeviceName (const char *dev) |
| | Set the device name. More...
|
| |
| const char * | getDeviceName () |
| |
| void | addMessage (const std::string &msg) |
| | Add message to the driver's message queue. More...
|
| |
| void | checkMessage (XMLEle *root) |
| |
| void | doMessage (XMLEle *msg) |
| |
| std::string | messageQueue (int index) const |
| |
| std::string | lastMessage () |
| |
| void | setMediator (INDI::BaseMediator *med) |
| | Set the driver's mediator to receive notification of news devices and updated property values. More...
|
| |
| INDI::BaseMediator * | getMediator () |
| |
| const char * | getDriverName () |
| |
| const char * | getDriverExec () |
| |
| const char * | getDriverVersion () |
| |
| | BaseDevice () |
| |
| virtual | ~BaseDevice () |
| |
| INumberVectorProperty * | getNumber (const char *name) |
| |
| ITextVectorProperty * | getText (const char *name) |
| |
| ISwitchVectorProperty * | getSwitch (const char *name) |
| |
| ILightVectorProperty * | getLight (const char *name) |
| |
| IBLOBVectorProperty * | getBLOB (const char *name) |
| |
| IPState | getPropertyState (const char *name) |
| |
| IPerm | getPropertyPermission (const char *name) |
| |
| void | registerProperty (void *p, INDI_PROPERTY_TYPE type) |
| |
| int | removeProperty (const char *name, char *errmsg) |
| | Remove a property. More...
|
| |
| void * | getRawProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| INDI::Property * | getProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| std::vector< INDI::Property * > * | getProperties () |
| | Return a list of all properties in the device. More...
|
| |
| bool | buildSkeleton (const char *filename) |
| | Build driver properties from a skeleton file. More...
|
| |
| bool | isConnected () |
| |
| void | setDeviceName (const char *dev) |
| | Set the device name. More...
|
| |
| const char * | getDeviceName () |
| |
| void | addMessage (const std::string &msg) |
| | Add message to the driver's message queue. More...
|
| |
| void | checkMessage (XMLEle *root) |
| |
| void | doMessage (XMLEle *msg) |
| |
| std::string | messageQueue (int index) const |
| |
| std::string | lastMessage () |
| |
| void | setMediator (INDI::BaseMediator *med) |
| | Set the driver's mediator to receive notification of news devices and updated property values. More...
|
| |
| INDI::BaseMediator * | getMediator () |
| |
| const char * | getDriverName () |
| |
| const char * | getDriverExec () |
| |
| const char * | getDriverVersion () |
| |
|
| bool | Connect () |
| | Connect to the device. More...
|
| |
| bool | Disconnect () |
| | Disconnect from device. More...
|
| |
| void | TimerHit () |
| | Callback function to be called once SetTimer duration elapses. More...
|
| |
| virtual IPState | Move (DomeDirection dir, DomeMotionCommand operation) |
| | Move the Dome in a particular direction. More...
|
| |
| virtual IPState | MoveRel (double azDiff) |
| | Move the Dome to an relative position. More...
|
| |
| virtual IPState | MoveAbs (double az) |
| | Move the Dome to an absolute azimuth. More...
|
| |
| virtual IPState | Park () |
| | Goto Park Position. More...
|
| |
| virtual IPState | UnPark () |
| | UnPark dome. More...
|
| |
| virtual IPState | ControlShutter (ShutterOperation operation) |
| | Open or Close shutter. More...
|
| |
| virtual bool | Abort () |
| | Abort all dome motion. More...
|
| |
| virtual bool | SetCurrentPark () |
| | SetCurrentPark Set current coordinates/encoders value as the desired parking position. More...
|
| |
| virtual bool | SetDefaultPark () |
| | SetDefaultPark Set default coordinates/encoders value as the desired parking position. More...
|
| |
| virtual bool | SetSpeed (double rpm) |
| | SetSpeed Set Dome speed. More...
|
| |
| const char * | GetShutterStatusString (ShutterStatus status) |
| | getShutterStatusString More...
|
| |
| void | SetParkDataType (DomeParkData type) |
| | setParkDataType Sets the type of parking data stored in the park data file and presented to the user. More...
|
| |
| bool | InitPark () |
| | InitPark Loads parking data (stored in ~/.indi/ParkData.xml) that contains parking status and parking position. More...
|
| |
| bool | isParked () |
| | isParked is dome currently parked? More...
|
| |
| void | SetParked (bool isparked) |
| | SetParked Change the mount parking status. More...
|
| |
| double | GetAxis1Park () |
| |
| double | GetAxis1ParkDefault () |
| |
| void | SetAxis1Park (double value) |
| | SetRAPark Set current AZ parking position. More...
|
| |
| void | SetAxis1ParkDefault (double steps) |
| | SetAxis1Park Set default AZ parking position. More...
|
| |
| char * | LoadParkData () |
| |
| bool | WriteParkData () |
| |
| bool | GetTargetAz (double &Az, double &Alt, double &minAz, double &maxAz) |
| | GetTargetAz. More...
|
| |
| bool | Intersection (point3D p1, point3D p2, double r, double &mu1, double &mu2) |
| | Intersection Calculate the intersection of a ray and a sphere. More...
|
| |
| bool | OpticalCenter (point3D MountCenter, double dOpticalAxis, double Lat, double Ah, point3D &OP) |
| | OpticalCenter This function calculates the distance from the optical axis to the Dome center. More...
|
| |
| bool | OpticalVector (double Az, double Alt, point3D &OV) |
| | OpticalVector This function calculates a second point for determining the optical axis. More...
|
| |
| bool | CheckHorizon (double HA, double dec, double lat) |
| | CheckHorizon Returns true if telescope points above horizon. More...
|
| |
| virtual bool | saveConfigItems (FILE *fp) |
| | saveConfigItems Saves the Device Port and Dome Presets in the configuration file More...
|
| |
| void | UpdateMountCoords () |
| | updateCoords updates the horizontal coordinates (Az & Alt) of the mount from the snooped RA, DEC and observer's location. More...
|
| |
| virtual void | UpdateAutoSync () |
| | UpdateAutoSync This function calculates the target dome azimuth from the mount's target coordinates given the dome parameters. More...
|
| |
| virtual bool | Handshake () |
| | perform handshake with device to check communication More...
|
| |
| double | Csc (double x) |
| |
| double | Sec (double x) |
| |
| virtual bool | SetSpeed (double rpm) |
| | SetSpeed Set Dome speed. More...
|
| |
| const char * | GetShutterStatusString (ShutterStatus status) |
| | getShutterStatusString More...
|
| |
| void | SetParkDataType (DomeParkData type) |
| | setParkDataType Sets the type of parking data stored in the park data file and presented to the user. More...
|
| |
| bool | InitPark () |
| | InitPark Loads parking data (stored in ~/.indi/ParkData.xml) that contains parking status and parking position. More...
|
| |
| bool | isParked () |
| | isParked is dome currently parked? More...
|
| |
| void | SetParked (bool isparked) |
| | SetParked Change the mount parking status. More...
|
| |
| double | GetAxis1Park () |
| |
| double | GetAxis1ParkDefault () |
| |
| void | SetAxis1Park (double value) |
| | SetRAPark Set current AZ parking position. More...
|
| |
| void | SetAxis1ParkDefault (double steps) |
| | SetAxis1Park Set default AZ parking position. More...
|
| |
| char * | LoadParkData () |
| |
| bool | WriteParkData () |
| |
| bool | GetTargetAz (double &Az, double &Alt, double &minAz, double &maxAz) |
| | GetTargetAz. More...
|
| |
| bool | Intersection (point3D p1, point3D p2, double r, double &mu1, double &mu2) |
| | Intersection Calculate the intersection of a ray and a sphere. More...
|
| |
| bool | OpticalCenter (point3D MountCenter, double dOpticalAxis, double Lat, double Ah, point3D &OP) |
| | OpticalCenter This function calculates the distance from the optical axis to the Dome center. More...
|
| |
| bool | OpticalVector (double Az, double Alt, point3D &OV) |
| | OpticalVector This function calculates a second point for determining the optical axis. More...
|
| |
| bool | CheckHorizon (double HA, double dec, double lat) |
| | CheckHorizon Returns true if telescope points above horizon. More...
|
| |
| virtual bool | saveConfigItems (FILE *fp) |
| | saveConfigItems Saves the Device Port and Dome Presets in the configuration file More...
|
| |
| void | UpdateMountCoords () |
| | updateCoords updates the horizontal coordinates (Az & Alt) of the mount from the snooped RA, DEC and observer's location. More...
|
| |
| virtual void | UpdateAutoSync () |
| | UpdateAutoSync This function calculates the target dome azimuth from the mount's target coordinates given the dome parameters. More...
|
| |
| virtual bool | Handshake () |
| | perform handshake with device to check communication More...
|
| |
| double | Csc (double x) |
| |
| double | Sec (double x) |
| |
| void | setDynamicPropertiesBehavior (bool defineEnabled, bool deleteEnabled) |
| | setDynamicPropertiesBehavior controls handling of dynamic properties. More...
|
| |
| virtual bool | loadConfig (bool silent=false, const char *property=nullptr) |
| | Load the last saved configuration file. More...
|
| |
| virtual bool | saveConfig (bool silent=false, const char *property=nullptr) |
| | Save the current properties in a configuration file. More...
|
| |
| virtual bool | saveAllConfigItems (FILE *fp) |
| | saveAllConfigItems Save all the drivers' properties in the configuration file More...
|
| |
| virtual bool | loadDefaultConfig () |
| | Load the default configuration file. More...
|
| |
| void | setDebug (bool enable) |
| | Toggle driver debug status A driver can be more verbose if Debug option is enabled by the client. More...
|
| |
| void | setSimulation (bool enable) |
| | Toggle driver simulation status A driver can run in simulation mode if Simulation option is enabled by the client. More...
|
| |
| virtual void | debugTriggered (bool enable) |
| | Inform driver that the debug option was triggered. More...
|
| |
| virtual void | simulationTriggered (bool enable) |
| | Inform driver that the simulation option was triggered. More...
|
| |
| bool | isDebug () |
| |
| bool | isSimulation () |
| |
| void | registerConnection (Connection::Interface *newConnection) |
| | registerConnection Add new connection plugin to the existing connection pool. More...
|
| |
| bool | unRegisterConnection (Connection::Interface *existingConnection) |
| | unRegisterConnection Remove connection from existing pool More...
|
| |
| Connection::Interface * | getActiveConnection () |
| |
| void | setDefaultPollingPeriod (uint32_t period) |
| |
| uint32_t | getPollingPeriod () |
| |
| void | setDynamicPropertiesBehavior (bool defineEnabled, bool deleteEnabled) |
| | setDynamicPropertiesBehavior controls handling of dynamic properties. More...
|
| |
| virtual bool | loadConfig (bool silent=false, const char *property=nullptr) |
| | Load the last saved configuration file. More...
|
| |
| virtual bool | saveConfig (bool silent=false, const char *property=nullptr) |
| | Save the current properties in a configuration file. More...
|
| |
| virtual bool | saveAllConfigItems (FILE *fp) |
| | saveAllConfigItems Save all the drivers' properties in the configuration file More...
|
| |
| virtual bool | loadDefaultConfig () |
| | Load the default configuration file. More...
|
| |
| void | setDebug (bool enable) |
| | Toggle driver debug status A driver can be more verbose if Debug option is enabled by the client. More...
|
| |
| void | setSimulation (bool enable) |
| | Toggle driver simulation status A driver can run in simulation mode if Simulation option is enabled by the client. More...
|
| |
| virtual void | debugTriggered (bool enable) |
| | Inform driver that the debug option was triggered. More...
|
| |
| virtual void | simulationTriggered (bool enable) |
| | Inform driver that the simulation option was triggered. More...
|
| |
| bool | isDebug () |
| |
| bool | isSimulation () |
| |
| void | registerConnection (Connection::Interface *newConnection) |
| | registerConnection Add new connection plugin to the existing connection pool. More...
|
| |
| bool | unRegisterConnection (Connection::Interface *existingConnection) |
| | unRegisterConnection Remove connection from existing pool More...
|
| |
| Connection::Interface * | getActiveConnection () |
| |
| void | setDefaultPollingPeriod (uint32_t period) |
| |
| uint32_t | getPollingPeriod () |
| |
| int | buildProp (XMLEle *root, char *errmsg) |
| | Build a property given the supplied XML element (defXXX) More...
|
| |
| int | setValue (XMLEle *root, char *errmsg) |
| | handle SetXXX commands from client More...
|
| |
| int | setBLOB (IBLOBVectorProperty *pp, XMLEle *root, char *errmsg) |
| | Parse and store BLOB in the respective vector. More...
|
| |
| int | buildProp (XMLEle *root, char *errmsg) |
| | Build a property given the supplied XML element (defXXX) More...
|
| |
| int | setValue (XMLEle *root, char *errmsg) |
| | handle SetXXX commands from client More...
|
| |
| int | setBLOB (IBLOBVectorProperty *pp, XMLEle *root, char *errmsg) |
| | Parse and store BLOB in the respective vector. More...
|
| |
|
| enum | DomeMeasurements {
DM_DOME_RADIUS,
DM_SHUTTER_WIDTH,
DM_NORTH_DISPLACEMENT,
DM_EAST_DISPLACEMENT,
DM_UP_DISPLACEMENT,
DM_OTA_OFFSET,
DM_DOME_RADIUS,
DM_SHUTTER_WIDTH,
DM_NORTH_DISPLACEMENT,
DM_EAST_DISPLACEMENT,
DM_UP_DISPLACEMENT,
DM_OTA_OFFSET
} |
| | Measurements necessary for dome-slit synchronization. More...
|
| |
| enum | DomeDirection { DOME_CW,
DOME_CCW,
DOME_CW,
DOME_CCW
} |
| |
| enum | DomeMotionCommand { MOTION_START,
MOTION_STOP,
MOTION_START,
MOTION_STOP
} |
| |
| enum | DomeParkData {
PARK_NONE,
PARK_AZ,
PARK_AZ_ENCODER,
PARK_NONE,
PARK_AZ,
PARK_AZ_ENCODER
} |
| |
| enum | ShutterOperation { SHUTTER_OPEN,
SHUTTER_CLOSE,
SHUTTER_OPEN,
SHUTTER_CLOSE
} |
| | Shutter operation command. More...
|
| |
| enum | DomeState {
DOME_IDLE,
DOME_MOVING,
DOME_SYNCED,
DOME_PARKING,
DOME_UNPARKING,
DOME_PARKED,
DOME_UNPARKED,
DOME_IDLE,
DOME_MOVING,
DOME_SYNCED,
DOME_PARKING,
DOME_UNPARKING,
DOME_PARKED,
DOME_UNPARKED
} |
| | Dome status. More...
|
| |
| enum | ShutterStatus {
SHUTTER_OPENED,
SHUTTER_CLOSED,
SHUTTER_MOVING,
SHUTTER_UNKNOWN,
SHUTTER_OPENED,
SHUTTER_CLOSED,
SHUTTER_MOVING,
SHUTTER_UNKNOWN
} |
| | Shutter Status. More...
|
| |
| enum | {
DOME_CAN_ABORT = 1 << 0,
DOME_CAN_ABS_MOVE = 1 << 1,
DOME_CAN_REL_MOVE,
DOME_CAN_PARK = 1 << 3,
DOME_HAS_SHUTTER = 1 << 4,
DOME_HAS_VARIABLE_SPEED = 1 << 5
} |
| |
| enum | { CONNECTION_NONE = 1 << 0,
CONNECTION_SERIAL = 1 << 1,
CONNECTION_TCP = 1 << 2
} |
| |
| enum | DomeMeasurements {
DM_DOME_RADIUS,
DM_SHUTTER_WIDTH,
DM_NORTH_DISPLACEMENT,
DM_EAST_DISPLACEMENT,
DM_UP_DISPLACEMENT,
DM_OTA_OFFSET,
DM_DOME_RADIUS,
DM_SHUTTER_WIDTH,
DM_NORTH_DISPLACEMENT,
DM_EAST_DISPLACEMENT,
DM_UP_DISPLACEMENT,
DM_OTA_OFFSET
} |
| |
| enum | DomeDirection { DOME_CW,
DOME_CCW,
DOME_CW,
DOME_CCW
} |
| |
| enum | DomeMotionCommand { MOTION_START,
MOTION_STOP,
MOTION_START,
MOTION_STOP
} |
| |
| enum | DomeParkData {
PARK_NONE,
PARK_AZ,
PARK_AZ_ENCODER,
PARK_NONE,
PARK_AZ,
PARK_AZ_ENCODER
} |
| |
| enum | ShutterOperation { SHUTTER_OPEN,
SHUTTER_CLOSE,
SHUTTER_OPEN,
SHUTTER_CLOSE
} |
| |
| enum | DomeState {
DOME_IDLE,
DOME_MOVING,
DOME_SYNCED,
DOME_PARKING,
DOME_UNPARKING,
DOME_PARKED,
DOME_UNPARKED,
DOME_IDLE,
DOME_MOVING,
DOME_SYNCED,
DOME_PARKING,
DOME_UNPARKING,
DOME_PARKED,
DOME_UNPARKED
} |
| |
| enum | ShutterStatus {
SHUTTER_OPENED,
SHUTTER_CLOSED,
SHUTTER_MOVING,
SHUTTER_UNKNOWN,
SHUTTER_OPENED,
SHUTTER_CLOSED,
SHUTTER_MOVING,
SHUTTER_UNKNOWN
} |
| |
| enum | {
DOME_CAN_ABORT = 1 << 0,
DOME_CAN_ABS_MOVE = 1 << 1,
DOME_CAN_REL_MOVE,
DOME_CAN_PARK = 1 << 3,
DOME_HAS_SHUTTER = 1 << 4,
DOME_HAS_VARIABLE_SPEED = 1 << 5
} |
| |
| enum | { CONNECTION_NONE = 1 << 0,
CONNECTION_SERIAL = 1 << 1,
CONNECTION_TCP = 1 << 2
} |
| |
| enum | INDI_ERROR {
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4,
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4
} |
| |
| enum | DRIVER_INTERFACE {
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15),
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15)
} |
| | The DRIVER_INTERFACE enum defines the class of devices the driver implements. More...
|
| |
| enum | INDI_ERROR {
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4,
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4
} |
| |
| enum | DRIVER_INTERFACE {
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15),
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15)
} |
| | The DRIVER_INTERFACE enum defines the class of devices the driver implements. More...
|
| |
| static void | buttonHelper (const char *button_n, ISState state, void *context) |
| |
| static void | buttonHelper (const char *button_n, ISState state, void *context) |
| |
| enum INDI::Dome:: { ... } | DomeConnection |
| |
| enum INDI::Dome:: { ... } | DomeConnection |
| |
| INumberVectorProperty | DomeSpeedNP |
| |
| INumber | DomeSpeedN [1] |
| |
| ISwitchVectorProperty | DomeMotionSP |
| |
| ISwitch | DomeMotionS [2] |
| |
| INumberVectorProperty | DomeAbsPosNP |
| |
| INumber | DomeAbsPosN [1] |
| |
| INumberVectorProperty | DomeRelPosNP |
| |
| INumber | DomeRelPosN [1] |
| |
| ISwitchVectorProperty | AbortSP |
| |
| ISwitch | AbortS [1] |
| |
| INumberVectorProperty | DomeParamNP |
| |
| INumber | DomeParamN [1] |
| |
| ISwitchVectorProperty | DomeShutterSP |
| |
| ISwitch | DomeShutterS [2] |
| |
| ISwitchVectorProperty | ParkSP |
| |
| ISwitch | ParkS [2] |
| |
| INumber | ParkPositionN [1] |
| |
| INumberVectorProperty | ParkPositionNP |
| |
| ISwitch | ParkOptionS [3] |
| |
| ISwitchVectorProperty | ParkOptionSP |
| |
| ISwitch | AutoParkS [2] |
| |
| ISwitchVectorProperty | AutoParkSP |
| |
| uint32_t | capability |
| |
| ShutterStatus | shutterState |
| |
| DomeParkData | parkDataType |
| |
| ITextVectorProperty | ActiveDeviceTP |
| |
| IText | ActiveDeviceT [2] {} |
| |
| ISwitchVectorProperty | TelescopeClosedLockTP |
| |
| ISwitch | TelescopeClosedLockT [2] |
| |
| INumber | PresetN [3] |
| |
| INumberVectorProperty | PresetNP |
| |
| ISwitch | PresetGotoS [3] |
| |
| ISwitchVectorProperty | PresetGotoSP |
| |
| INumber | DomeMeasurementsN [6] |
| |
| INumberVectorProperty | DomeMeasurementsNP |
| |
| ISwitchVectorProperty | OTASideSP |
| |
| ISwitch | OTASideS [2] |
| |
| ISwitchVectorProperty | DomeAutoSyncSP |
| |
| ISwitch | DomeAutoSyncS [2] |
| |
| double | prev_az |
| |
| double | prev_alt |
| |
| double | prev_ra |
| |
| double | prev_dec |
| |
| int | PortFD = -1 |
| |
| Connection::Serial * | serialConnection = NULL |
| |
| Connection::TCP * | tcpConnection = NULL |
| |
| DomeState | domeState |
| |
| IPState | mountState |
| |
| IPState | weatherState |
| |
| struct ln_lnlat_posn | observer |
| |
| bool | HaveLatLong = false |
| |
| struct ln_hrz_posn | mountHoriztonalCoords |
| |
| struct ln_equ_posn | mountEquatorialCoords |
| |
| bool | HaveRaDec = false |
| |
| uint32_t | POLLMS = 1000 |
| | Period in milliseconds to call TimerHit(). Default 1000 ms. More...
|
| |
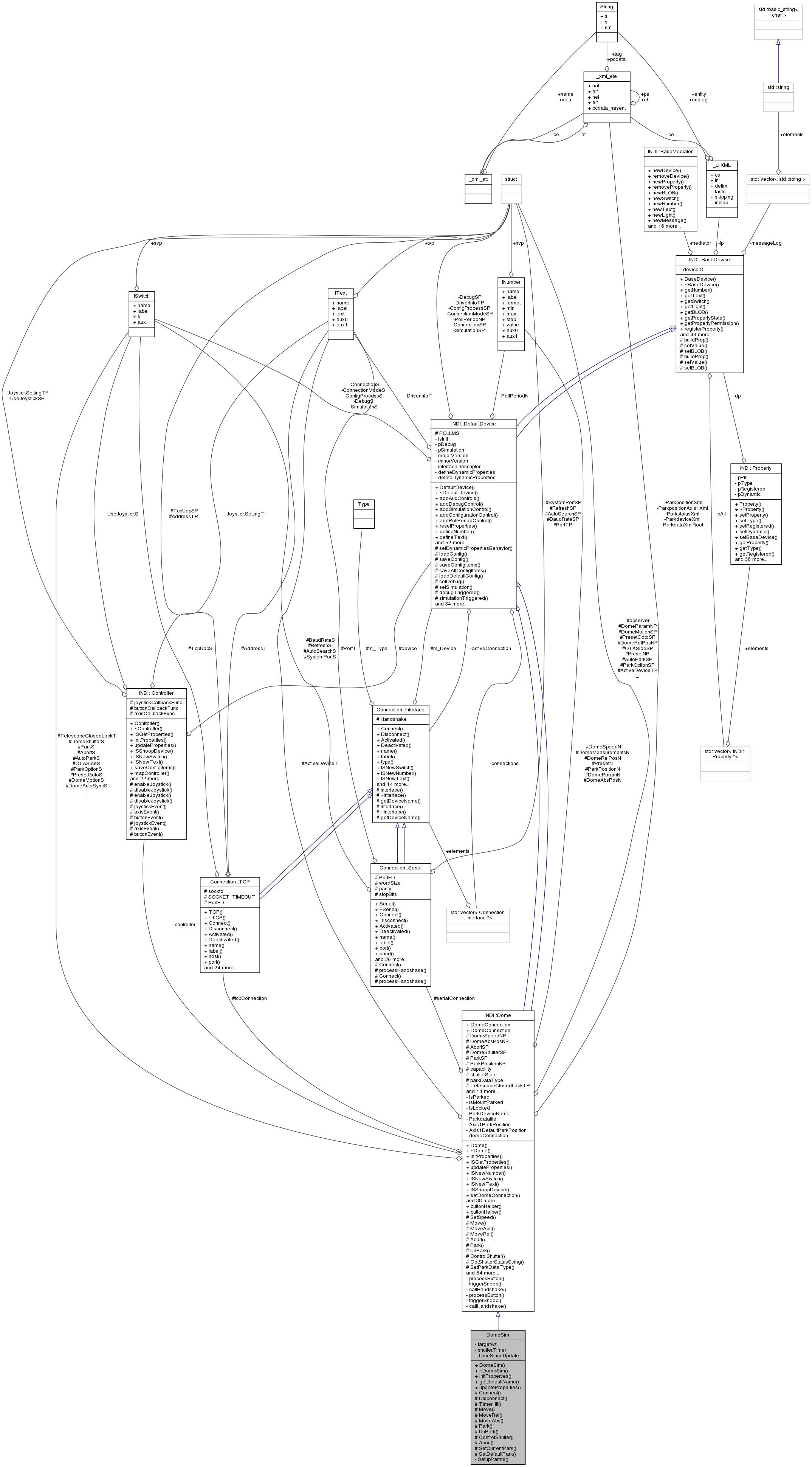
The DomeSim class provides an absolute position dome that supports parking, unparking, and slaving.
The driver can support custom parking positions and includes shutter control. It can be used to simulate dome slaving.
The dome parameters must be set before slaving is enabled. Furthermore, the dome listens to changes in the TARGET_EOD_COORS of the mount driver in order to make the decision to move to a new target location.
All the mathematical models are taken care of in the base INDI::Dome class.

 Public Member Functions inherited from INDI::Dome
Public Member Functions inherited from INDI::Dome