This is the implementation of the MoCon card commands. More...
#include <Card.h>

Classes | |
| struct | MoConCardEvent |
| This is the implementation of the handler for the incoming events and function errors. More... | |
Public Member Functions | |
| MoConCard (std::string _name, Nice::JointPtr _config, MPIACoreProtocolPtr _protocol) | |
| Constructor. More... | |
| ~MoConCard () | |
| Destructor. More... | |
| void | lockCard () |
| This method lock the card for an exclusive access for one client. More... | |
| void | unlockCard () |
| This method unlock the card. More... | |
| void | setMultiUpdateSettings (const int _modules) |
| This method define which motor have to be move synchronously when the method moveMultiUpdate() is called. More... | |
| void | moveMultiUpdate () |
| This command starts the motors synchronously. More... | |
| void | setDigitalOutBit (const unsigned int _selectID, const unsigned int _bit) |
| This methods sets a bit on the digital out bus. More... | |
| void | setDigitalOutByte (const unsigned int _selectID, const unsigned int _byte) |
| This methods sets a byte on the digital out bus. More... | |
| void | setDigitalOutWord (const unsigned int _selectID, const unsigned int _word) |
| This methods sets a word on the digital out bus. More... | |
| void | setDigitalOutLong (const unsigned int _selectID, const unsigned int _long) |
| This methods defines all bits on the digital bus. More... | |
| unsigned int | getDigitalInBit (const unsigned int _selectID) |
| This methods reads a bit from the digital bus. More... | |
| unsigned int | getDigitalInByte (const unsigned int _selectID) |
| This methods reads a byte from the digital bus. More... | |
| unsigned int | getDigitalInWord (const unsigned int _selectID) |
| This methods reads a word from the digital bus. More... | |
| unsigned int | getDigitalInLong (const unsigned int _selectID) |
| This methods reads all bits from the digital bus. More... | |
| void | setTimeTraceSampleRate (const unsigned int _sampleRate) |
| This methods sets the sample rate of the time based trace. More... | |
| void | setTimeTraceNumberOfSamples (const unsigned int _numberOfSamples) |
| This methods sets the number of samples of the time based trace. More... | |
| void | setTimeTraceSampleMode (const Basda::ValueTraceSampleMode::Constant _mode) |
| This methods sets the sample mode of the time based trace. More... | |
| void | timeTraceStart () |
| This methods starts the time based trace. More... | |
| void | timeTraceStop () |
| This methods stops the time based trace. More... | |
| void | clearTimeTraceBuffer () |
| This methods clear and freed the data buffer of the time based trace. More... | |
| int | getTraceInfo (Nice::JointPtr _config) |
| This method returns the current status of the time based trace. More... | |
| void | setEventTraceSampleRate (const unsigned int _sampleRate) |
| This methods sets the sample rate of the event based trace. More... | |
| void | eventTraceStart () |
| This methods starts the event based trace. More... | |
| void | eventTraceStop () |
| This methods stops the event based trace. More... | |
| MoConCard (std::string _name, Nice::JointPtr _config, MPIACoreProtocolPtr _protocol) | |
| Constructor. More... | |
| ~MoConCard () | |
| Destructor. More... | |
| void | lockCard () |
| This method lock the card for an exclusive access for one client. More... | |
| void | unlockCard () |
| This method unlock the card. More... | |
| void | setMultiUpdateSettings (const int _modules) |
| This method define which motor have to be move synchronously when the method moveMultiUpdate() is called. More... | |
| void | moveMultiUpdate () |
| This command starts the motors synchronously. More... | |
| void | setDigitalOutBit (const unsigned int _selectID, const unsigned int _bit) |
| This methods sets a bit on the digital out bus. More... | |
| void | setDigitalOutByte (const unsigned int _selectID, const unsigned int _byte) |
| This methods sets a byte on the digital out bus. More... | |
| void | setDigitalOutWord (const unsigned int _selectID, const unsigned int _word) |
| This methods sets a word on the digital out bus. More... | |
| void | setDigitalOutLong (const unsigned int _selectID, const unsigned int _long) |
| This methods defines all bits on the digital bus. More... | |
| unsigned int | getDigitalInBit (const unsigned int _selectID) |
| This methods reads a bit from the digital bus. More... | |
| unsigned int | getDigitalInByte (const unsigned int _selectID) |
| This methods reads a byte from the digital bus. More... | |
| unsigned int | getDigitalInWord (const unsigned int _selectID) |
| This methods reads a word from the digital bus. More... | |
| unsigned int | getDigitalInLong (const unsigned int _selectID) |
| This methods reads all bits from the digital bus. More... | |
| void | setTimeTraceSampleRate (const unsigned int _sampleRate) |
| This methods sets the sample rate of the time based trace. More... | |
| void | setTimeTraceNumberOfSamples (const unsigned int _numberOfSamples) |
| This methods sets the number of samples of the time based trace. More... | |
| void | setTimeTraceSampleMode (const Basda::ValueTraceSampleMode::Constant _mode) |
| This methods sets the sample mode of the time based trace. More... | |
| void | timeTraceStart () |
| This methods starts the time based trace. More... | |
| void | timeTraceStop () |
| This methods stops the time based trace. More... | |
| void | clearTimeTraceBuffer () |
| This methods clear and freed the data buffer of the time based trace. More... | |
| int | getTraceInfo (Nice::JointPtr _config) |
| This method returns the current status of the time based trace. More... | |
| void | setEventTraceSampleRate (const unsigned int _sampleRate) |
| This methods sets the sample rate of the event based trace. More... | |
| void | eventTraceStart () |
| This methods starts the event based trace. More... | |
| void | eventTraceStop () |
| This methods stops the event based trace. More... | |
 Public Member Functions inherited from Basda::MPIACoreCard Public Member Functions inherited from Basda::MPIACoreCard | |
| MPIACoreCard (std::string _name, Nice::JointPtr _config, Basda::MPIACoreProtocolPtr _protocol) | |
| Constructor. More... | |
| ~MPIACoreCard () | |
| Destructor. More... | |
| std::string | version () |
| The methods returns the current version string of the MPIA in-house electronic. More... | |
| std::vector< unsigned int > | getRegistration () |
| The methods returns all registered module and card that are registered at the MPIA in-house electronic. More... | |
| void | reset () |
| Resets the MPIA in-house electronic software and hardware. More... | |
| void | setXonXoff (const ValueSwitch::Constant _enable) |
| Enables/disables the XOnXOff protocol. More... | |
| bool | getXonXoff () |
| Returns the status of the XOnXOff protocol. More... | |
| void | setSerialRate (const ValueSerialRate::Constant _baudRate) |
| Sets the baud rate of the serial interface. More... | |
| unsigned int | getSerialRate () |
| Returns the current baud rate. More... | |
| void | setCANRate (const ValueCanRate::Constant _canRate) |
| Sets the CAN rate of the CAN bus. More... | |
| unsigned int | getCANRate () |
| Returns the current CAN rate. More... | |
| void | setEventFlag (const ValueSwitch::Constant _eventMode) |
| Sets the event message flag. More... | |
| bool | getEventFlag () |
| Returns the current event message flags. More... | |
| void | setInfoFlag (const ValueSwitch::Constant _infoMode) |
| Sets the event message flag. More... | |
| bool | getInfoFlag () |
| Returns the current event message flags. More... | |
| void | setIPAddress (const std::string _ip) |
| Sets the IP address of the MPIA in-house electronic. More... | |
| std::string | getIPAddress () |
| Returns the current IP address. More... | |
| void | setGateAddress (const std::string _gate) |
| Sets the gate address of the MPIA in-house electronic. More... | |
| std::string | getGateAddress () |
| Returns the current gate address. More... | |
| void | setMaskAddress (const std::string _mask) |
| Sets the mask address of the MPIA in-house electronic. More... | |
| std::string | getMaskAddress () |
| Returns the current mask address. More... | |
| void | setLinkTimeout (const unsigned int _timeout) |
| Sets the Ethernet connection timeout. More... | |
| int | getLinkTimeout () |
| Returns the Ethernet connection timeout. More... | |
| void | waitForEvent () |
| Waits until an event is received in a certain time (timeout). More... | |
| std::string | getFatalError () |
| Returns the fatal error message. More... | |
| void | resetFatalError () |
| Resets the fatal error. More... | |
| MPIACoreCard (std::string _name, Nice::JointPtr _config, Basda::MPIACoreProtocolPtr _protocol) | |
| Constructor. More... | |
| ~MPIACoreCard () | |
| Destructor. More... | |
| std::string | version () |
| The methods returns the current version string of the MPIA in-house electronic. More... | |
| std::vector< unsigned int > | getRegistration () |
| The methods returns all registered module and card that are registered at the MPIA in-house electronic. More... | |
| void | reset () |
| Resets the MPIA in-house electronic software and hardware. More... | |
| void | setXonXoff (const ValueSwitch::Constant _enable) |
| Enables/disables the XOnXOff protocol. More... | |
| bool | getXonXoff () |
| Returns the status of the XOnXOff protocol. More... | |
| void | setSerialRate (const ValueSerialRate::Constant _baudRate) |
| Sets the baud rate of the serial interface. More... | |
| unsigned int | getSerialRate () |
| Returns the current baud rate. More... | |
| void | setCANRate (const ValueCanRate::Constant _canRate) |
| Sets the CAN rate of the CAN bus. More... | |
| unsigned int | getCANRate () |
| Returns the current CAN rate. More... | |
| void | setEventFlag (const ValueSwitch::Constant _eventMode) |
| Sets the event message flag. More... | |
| bool | getEventFlag () |
| Returns the current event message flags. More... | |
| void | setInfoFlag (const ValueSwitch::Constant _infoMode) |
| Sets the event message flag. More... | |
| bool | getInfoFlag () |
| Returns the current event message flags. More... | |
| void | setIPAddress (const std::string _ip) |
| Sets the IP address of the MPIA in-house electronic. More... | |
| std::string | getIPAddress () |
| Returns the current IP address. More... | |
| void | setGateAddress (const std::string _gate) |
| Sets the gate address of the MPIA in-house electronic. More... | |
| std::string | getGateAddress () |
| Returns the current gate address. More... | |
| void | setMaskAddress (const std::string _mask) |
| Sets the mask address of the MPIA in-house electronic. More... | |
| std::string | getMaskAddress () |
| Returns the current mask address. More... | |
| void | setLinkTimeout (const unsigned int _timeout) |
| Sets the Ethernet connection timeout. More... | |
| int | getLinkTimeout () |
| Returns the Ethernet connection timeout. More... | |
| void | waitForEvent () |
| Waits until an event is received in a certain time (timeout). More... | |
| std::string | getFatalError () |
| Returns the fatal error message. More... | |
| void | resetFatalError () |
| Resets the fatal error. More... | |
Private Member Functions | |
| void | addInternalProperties () |
| This method add some internal properties like command properties or status properties. More... | |
| void | getMotorControllerErrorNr () |
| This methods returns the motor controller error number. More... | |
| void | addInternalProperties () |
| This method add some internal properties like command properties or status properties. More... | |
| void | getMotorControllerErrorNr () |
| This methods returns the motor controller error number. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from Basda::MPIACore | |
| MPIACore (std::string _name, Nice::JointPtr _config, const MPIACoreProtocolPtr _protocol) | |
| ~MPIACore () | |
| template<typename Type > | |
| Type | checkAttribute (const std::string &_node, const std::string &_attributeName, const Type &_default) |
| template<typename RT > | |
| std::vector< RT > | getVector (const std::string &_str) |
| This is a generic method to convert a data string to a vector. More... | |
| std::string | name () |
| MPIACore (std::string _name, Nice::JointPtr _config, const MPIACoreProtocolPtr _protocol) | |
| ~MPIACore () | |
| template<typename Type > | |
| Type | checkAttribute (const std::string &_node, const std::string &_attributeName, const Type &_default) |
| template<typename RT > | |
| std::vector< RT > | getVector (const std::string &_str) |
| This is a generic method to convert a data string to a vector. More... | |
| std::string | name () |
| Static Protected Member Functions inherited from Basda::MPIACore | |
| template<typename RT > | |
| static RT | getValue (const std::string &_str) |
| This is a generic method to convert a data string to a number. More... | |
| template<typename RT > | |
| static RT | getValue (const std::string &_str) |
| This is a generic method to convert a data string to a number. More... | |
| Protected Attributes inherited from Basda::MPIACore | |
| std::string | m_name |
| std::string | m_address |
| member of the connection address More... | |
| unsigned int | m_cardNo |
| member of the card number More... | |
| unsigned int | m_moduleNo |
| member of the module number More... | |
| HandlerPtr | m_handler |
| MPIACoreProtocolPtr | m_protocol |
| member of the protocol to communicate with the MPIA in-house electronic. More... | |
| Nice::JointPtr | m_config |
| member of the root of the configuration tree More... | |
| bool | m_warning |
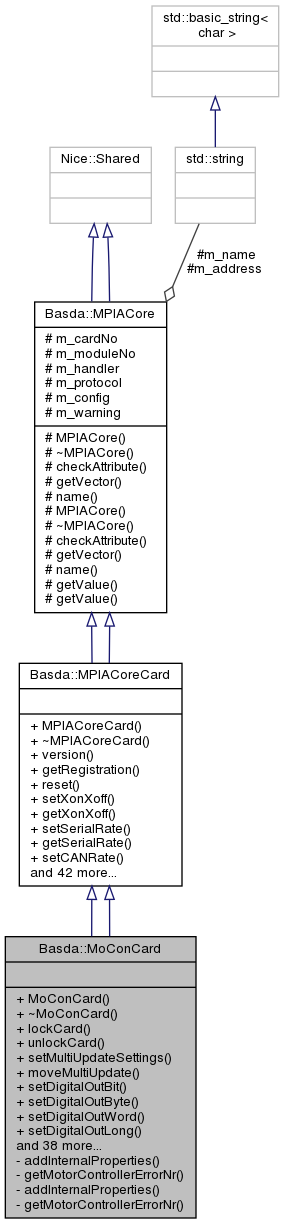
Detailed Description
This is the implementation of the MoCon card commands.
The MPIA electronic rack can keep up to 8 motor controller cards, which can control up to 8 motors each. This class extends the MPIACoreCard class with the functionality of the motor controller card.
Different services can run using the different modules at the same card. In order to configure the motor controller a set of commands have to be called in a certain order. Thereby must be sure that no other service can interrupt the current programming and the execution of the programmed command. Hence this the card has to be locked first for an exclusive access and unlocked when the programming and the execution is done.
- Version
- 09.06.29
- Date
- 2009.06.29
Constructor & Destructor Documentation
◆ MoConCard() [1/2]
| Basda::MoConCard::MoConCard | ( | std::string | _name, |
| Nice::JointPtr | _config, | ||
| Basda::MPIACoreProtocolPtr | _protocol | ||
| ) |
Constructor.
◆ ~MoConCard() [1/2]
|
inline |
Destructor.
◆ MoConCard() [2/2]
| Basda::MoConCard::MoConCard | ( | std::string | _name, |
| Nice::JointPtr | _config, | ||
| MPIACoreProtocolPtr | _protocol | ||
| ) |
Constructor.
◆ ~MoConCard() [2/2]
|
inline |
Destructor.
Member Function Documentation
◆ addInternalProperties() [1/2]
|
private |
This method add some internal properties like command properties or status properties.
◆ addInternalProperties() [2/2]
|
private |
This method add some internal properties like command properties or status properties.
◆ clearTimeTraceBuffer() [1/2]
| void Basda::MoConCard::clearTimeTraceBuffer | ( | ) |
This methods clear and freed the data buffer of the time based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ clearTimeTraceBuffer() [2/2]
| void Basda::MoConCard::clearTimeTraceBuffer | ( | ) |
This methods clear and freed the data buffer of the time based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ eventTraceStart() [1/2]
| void Basda::MoConCard::eventTraceStart | ( | ) |
This methods starts the event based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ eventTraceStart() [2/2]
| void Basda::MoConCard::eventTraceStart | ( | ) |
This methods starts the event based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ eventTraceStop() [1/2]
| void Basda::MoConCard::eventTraceStop | ( | ) |
This methods stops the event based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ eventTraceStop() [2/2]
| void Basda::MoConCard::eventTraceStop | ( | ) |
This methods stops the event based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInBit() [1/2]
| unsigned int Basda::MoConCard::getDigitalInBit | ( | const unsigned int | _selectID | ) |
This methods reads a bit from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads a bit from that 32 bit input bus.
- Parameters
-
_selectID the bit to read (0..31)
- Returns
- the read bit
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInBit() [2/2]
| unsigned int Basda::MoConCard::getDigitalInBit | ( | const unsigned int | _selectID | ) |
This methods reads a bit from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads a bit from that 32 bit input bus.
- Parameters
-
_selectID the bit to read (0..31)
- Returns
- the read bit
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInByte() [1/2]
| unsigned int Basda::MoConCard::getDigitalInByte | ( | const unsigned int | _selectID | ) |
This methods reads a byte from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads a byte from that 32 bit input bus.
- Parameters
-
_selectID the byte to read (0..3)
- Returns
- the read byte
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInByte() [2/2]
| unsigned int Basda::MoConCard::getDigitalInByte | ( | const unsigned int | _selectID | ) |
This methods reads a byte from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads a byte from that 32 bit input bus.
- Parameters
-
_selectID the byte to read (0..3)
- Returns
- the read byte
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInLong() [1/2]
| unsigned int Basda::MoConCard::getDigitalInLong | ( | const unsigned int | _selectID | ) |
This methods reads all bits from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads all bits from that 32 bit input bus.
- Parameters
-
_selectID have to be 0 to read all bits of that 32 bit input bus
- Returns
- all bits of the bus
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInLong() [2/2]
| unsigned int Basda::MoConCard::getDigitalInLong | ( | const unsigned int | _selectID | ) |
This methods reads all bits from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads all bits from that 32 bit input bus.
- Parameters
-
_selectID have to be 0 to read all bits of that 32 bit input bus
- Returns
- all bits of the bus
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInWord() [1/2]
| unsigned int Basda::MoConCard::getDigitalInWord | ( | const unsigned int | _selectID | ) |
This methods reads a word from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads a word from that 32 bit input bus.
- Parameters
-
_selectID the word to read (0..1)
- Returns
- the read word
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getDigitalInWord() [2/2]
| unsigned int Basda::MoConCard::getDigitalInWord | ( | const unsigned int | _selectID | ) |
This methods reads a word from the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit input bus, which can be freely programmed. In total is it a 32 bit input bus. This method reads a word from that 32 bit input bus.
- Parameters
-
_selectID the word to read (0..1)
- Returns
- the read word
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getMotorControllerErrorNr() [1/2]
|
private |
This methods returns the motor controller error number.
In some cases the motor controller returns a Basda::MoCon::CheckSumException. This method read the error code from the MoCon and stored in the property
- VAR.MC.ERROR
It reads the error on the MoCon and throws an exception, because it is still not defined how to handle that exception.
This method don't need to be locked, because this method is private and will be called from the internal methods only.
- Exceptions
-
Basda::MoCon::CheckSumException
- See also
- Basda::MoCon::CheckSumException
◆ getMotorControllerErrorNr() [2/2]
|
private |
This methods returns the motor controller error number.
In some cases the motor controller returns a Basda::MoCon::CheckSumException. This method read the error code from the MoCon and stored in the property
- VAR.MC.ERROR
It reads the error on the MoCon and throws an exception, because it is still not defined how to handle that exception.
This method don't need to be locked, because this method is private and will be called from the internal methods only.
- Exceptions
-
Basda::MoCon::CheckSumException
- See also
- Basda::MoCon::CheckSumException
◆ getTraceInfo() [1/2]
| int Basda::MoConCard::getTraceInfo | ( | Nice::JointPtr | _config | ) |
This method returns the current status of the time based trace.
It returns the selected sample mode (SAMPLE_MODE), the status if the trace is still running (TRACING), the status if a buffer overflow (WRAP) was detected and the number of already logged data (TRACED_VALUES). All these data will be written back in the VAR property folder.
The received data will be stored in the following properties:
- VAR.TRACE.INFO.SAMPLE_MODE
- VAR.TRACE.INFO.TRACING
- VAR.TRACE.INFO.WRAP
- VAR.TRACE.INFO.TRACED_VALUES
- Parameters
-
_config the root of the configuration tree of the calling device to sort the response correctly
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ getTraceInfo() [2/2]
| int Basda::MoConCard::getTraceInfo | ( | Nice::JointPtr | _config | ) |
This method returns the current status of the time based trace.
It returns the selected sample mode (SAMPLE_MODE), the status if the trace is still running (TRACING), the status if a buffer overflow (WRAP) was detected and the number of already logged data (TRACED_VALUES). All these data will be written back in the VAR property folder.
The received data will be stored in the following properties:
- VAR.TRACE.INFO.SAMPLE_MODE
- VAR.TRACE.INFO.TRACING
- VAR.TRACE.INFO.WRAP
- VAR.TRACE.INFO.TRACED_VALUES
- Parameters
-
_config the root of the configuration tree of the calling device to sort the response correctly
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ lockCard() [1/2]
| void Basda::MoConCard::lockCard | ( | ) |
This method lock the card for an exclusive access for one client.
All methods will be lock till the client with the exclusive access unlock this object.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ lockCard() [2/2]
| void Basda::MoConCard::lockCard | ( | ) |
This method lock the card for an exclusive access for one client.
All methods will be lock till the client with the exclusive access unlock this object.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ moveMultiUpdate() [1/2]
| void Basda::MoConCard::moveMultiUpdate | ( | ) |
This command starts the motors synchronously.
After the motors are marked for synchronous moving and the move command is selected, this method will start the movement of all motors at the same time.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- moveMultiUpdate
- Basda::MoConModule::moveToAbsolutePosition
- Basda::MoConModule::moveToReleativePosition
- Basda::MoConModule::moveToHome
◆ moveMultiUpdate() [2/2]
| void Basda::MoConCard::moveMultiUpdate | ( | ) |
This command starts the motors synchronously.
After the motors are marked for synchronous moving and the move command is selected, this method will start the movement of all motors at the same time.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- moveMultiUpdate
- Basda::MoConModule::moveToAbsolutePosition
- Basda::MoConModule::moveToReleativePosition
- Basda::MoConModule::moveToHome
◆ setDigitalOutBit() [1/2]
This methods sets a bit on the digital out bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit output bus, which can be freely programmed. In total is it a 32 bit output bus. This method sets a bit on that 32 bit output bus.
- Parameters
-
_selectID number (0..31) which bit has to be set _bit set the bit to 0x0 - low or 0x1 - high
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setDigitalOutBit() [2/2]
This methods sets a bit on the digital out bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit output bus, which can be freely programmed. In total is it a 32 bit output bus. This method sets a bit on that 32 bit output bus.
- Parameters
-
_selectID number (0..31) which bit has to be set _bit set the bit to 0x0 - low or 0x1 - high
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setDigitalOutByte() [1/2]
This methods sets a byte on the digital out bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 output bit bus, which can be freely programmed. In total is it a 32 output bit bus. This method sets a byte on that 32 bit output bus.
- Parameters
-
_selectID number (0..3) which byte has to be set _byte set the byte (0x0..0xFF)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setDigitalOutByte() [2/2]
This methods sets a byte on the digital out bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 output bit bus, which can be freely programmed. In total is it a 32 output bit bus. This method sets a byte on that 32 bit output bus.
- Parameters
-
_selectID number (0..3) which byte has to be set _byte set the byte (0x0..0xFF)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setDigitalOutLong() [1/2]
This methods defines all bits on the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit output bus, which can be freely programmed. In total is it a 32 bit output bus. This method sets all bits on that 32 bit output bus.
- Parameters
-
_selectID have to be 0 to set all bits in that 32 bit bus _long set the long (0x0..0xFFFFFFFF)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setDigitalOutLong() [2/2]
This methods defines all bits on the digital bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 bit output bus, which can be freely programmed. In total is it a 32 bit output bus. This method sets all bits on that 32 bit output bus.
- Parameters
-
_selectID have to be 0 to set all bits in that 32 bit bus _long set the long (0x0..0xFFFFFFFF)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setDigitalOutWord() [1/2]
This methods sets a word on the digital out bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 output bit bus, which can be freely programmed. In total is it a 32 output bit bus. This method sets a word on that 32 bit output bus.
- Parameters
-
_selectID number (0..1) which word has to be set _word set the word (0x0..0xFFFF)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setDigitalOutWord() [2/2]
This methods sets a word on the digital out bus.
The motor controller card has 2 microcontroller that controlling the motor devices. The first 4 motors are driven by one chipset, the last 4 motors are driven by the second chipset. Each chipset has a 16 output bit bus, which can be freely programmed. In total is it a 32 output bit bus. This method sets a word on that 32 bit output bus.
- Parameters
-
_selectID number (0..1) which word has to be set _word set the word (0x0..0xFFFF)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setEventTraceSampleRate() [1/2]
| void Basda::MoConCard::setEventTraceSampleRate | ( | const unsigned int | _sampleRate | ) |
This methods sets the sample rate of the event based trace.
The sample rate defines every which motor controller clock cycle a value has to be logged.
- Note
- Do not choose the value too less. The module needs time to send the logged value toward the clients.
- Parameters
-
_sampleRate the sample rate (1..65000)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- eventTraceStart, eventTraceStop, getTraceInfo
◆ setEventTraceSampleRate() [2/2]
| void Basda::MoConCard::setEventTraceSampleRate | ( | const unsigned int | _sampleRate | ) |
This methods sets the sample rate of the event based trace.
The sample rate defines every which motor controller clock cycle a value has to be logged.
- Note
- Do not choose the value too less. The module needs time to send the logged value toward the clients.
- Parameters
-
_sampleRate the sample rate (1..65000)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- eventTraceStart, eventTraceStop, getTraceInfo
◆ setMultiUpdateSettings() [1/2]
| void Basda::MoConCard::setMultiUpdateSettings | ( | const int | _modules | ) |
This method define which motor have to be move synchronously when the method moveMultiUpdate() is called.
Motors on the same card can be moved synchronously after these are marked. After that it has to be defined which move command has to be executed when the method moveMultiUpdate() is called.
- Parameters
-
_modules a byte where every bit marks its corresponding motor. (bit 0: motor 1, ... bit 7: motor 8)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- moveMultiUpdate
- Basda::MoConModule::moveToAbsolutePosition
- Basda::MoConModule::moveToReleativePosition
- Basda::MoConModule::moveToHome
◆ setMultiUpdateSettings() [2/2]
| void Basda::MoConCard::setMultiUpdateSettings | ( | const int | _modules | ) |
This method define which motor have to be move synchronously when the method moveMultiUpdate() is called.
Motors on the same card can be moved synchronously after these are marked. After that it has to be defined which move command has to be executed when the method moveMultiUpdate() is called.
- Parameters
-
_modules a byte where every bit marks its corresponding motor. (bit 0: motor 1, ... bit 7: motor 8)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- moveMultiUpdate
- Basda::MoConModule::moveToAbsolutePosition
- Basda::MoConModule::moveToReleativePosition
- Basda::MoConModule::moveToHome
◆ setTimeTraceNumberOfSamples() [1/2]
| void Basda::MoConCard::setTimeTraceNumberOfSamples | ( | const unsigned int | _numberOfSamples | ) |
This methods sets the number of samples of the time based trace.
Number of samples defines how many values have to be logged of each selected sample type.
- Parameters
-
_numberOfSamples the number of samples
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setTimeTraceNumberOfSamples() [2/2]
| void Basda::MoConCard::setTimeTraceNumberOfSamples | ( | const unsigned int | _numberOfSamples | ) |
This methods sets the number of samples of the time based trace.
Number of samples defines how many values have to be logged of each selected sample type.
- Parameters
-
_numberOfSamples the number of samples
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setTimeTraceSampleMode() [1/2]
| void Basda::MoConCard::setTimeTraceSampleMode | ( | const Basda::ValueTraceSampleMode::Constant | _mode | ) |
This methods sets the sample mode of the time based trace.
The Sample Mode defines whether the trace should continue with tracing from the beginning of the buffer after the end is reached (Rolling_Buffer) or whether the trace should stop (One_Time). Is the sample mode Rolling_Buffer is selected the trace will stop when the stop method is called.
- Parameters
-
_mode the sample mode
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- setTimeTraceSampleRate
- setTimeTraceNumberOfSamples
- timeTraceStart
- timeTraceStop
- clearTimeTraceBuffer
- getTraceInfo
- MPIA/Core/MoCon/CommandIDs.h
◆ setTimeTraceSampleMode() [2/2]
| void Basda::MoConCard::setTimeTraceSampleMode | ( | const Basda::ValueTraceSampleMode::Constant | _mode | ) |
This methods sets the sample mode of the time based trace.
The Sample Mode defines whether the trace should continue with tracing from the beginning of the buffer after the end is reached (Rolling_Buffer) or whether the trace should stop (One_Time). Is the sample mode Rolling_Buffer is selected the trace will stop when the stop method is called.
- Parameters
-
_mode the sample mode
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
- See also
- setTimeTraceSampleRate
- setTimeTraceNumberOfSamples
- timeTraceStart
- timeTraceStop
- clearTimeTraceBuffer
- getTraceInfo
- MPIA/Core/MoCon/CommandIDs.h
◆ setTimeTraceSampleRate() [1/2]
| void Basda::MoConCard::setTimeTraceSampleRate | ( | const unsigned int | _sampleRate | ) |
This methods sets the sample rate of the time based trace.
The sample rate defines every which motor controller clock cycle a value has to be logged.
- Parameters
-
_sampleRate the sample rate (1..65000)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ setTimeTraceSampleRate() [2/2]
| void Basda::MoConCard::setTimeTraceSampleRate | ( | const unsigned int | _sampleRate | ) |
This methods sets the sample rate of the time based trace.
The sample rate defines every which motor controller clock cycle a value has to be logged.
- Parameters
-
_sampleRate the sample rate (1..65000)
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ timeTraceStart() [1/2]
| void Basda::MoConCard::timeTraceStart | ( | ) |
This methods starts the time based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ timeTraceStart() [2/2]
| void Basda::MoConCard::timeTraceStart | ( | ) |
This methods starts the time based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ timeTraceStop() [1/2]
| void Basda::MoConCard::timeTraceStop | ( | ) |
This methods stops the time based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ timeTraceStop() [2/2]
| void Basda::MoConCard::timeTraceStop | ( | ) |
This methods stops the time based trace.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ unlockCard() [1/2]
| void Basda::MoConCard::unlockCard | ( | ) |
This method unlock the card.
All methods will be unlocked. This can be done only by that client which has exclusive access.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
◆ unlockCard() [2/2]
| void Basda::MoConCard::unlockCard | ( | ) |
This method unlock the card.
All methods will be unlocked. This can be done only by that client which has exclusive access.
- Exceptions
-
Basda::MPIA::ModuleIsInUseException
The documentation for this class was generated from the following files:
