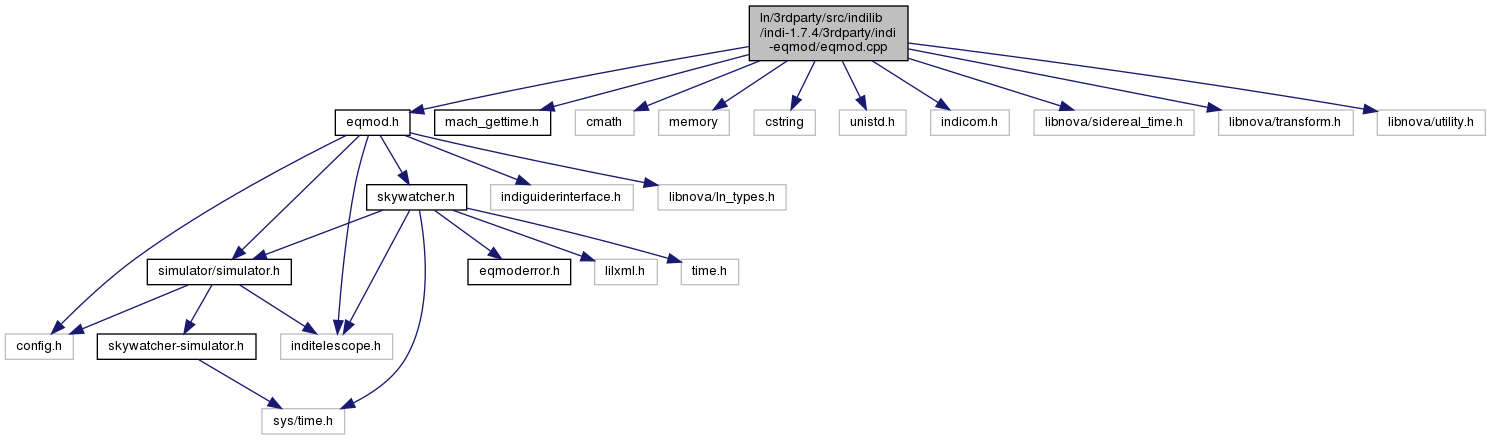
#include "eqmod.h"#include "mach_gettime.h"#include <cmath>#include <memory>#include <cstring>#include <unistd.h>#include <indicom.h>#include <libnova/sidereal_time.h>#include <libnova/transform.h>#include <libnova/utility.h>
Include dependency graph for eqmod.cpp:
Macros | |
| #define | DEVICE_NAME "EQMod Mount" |
| #define | GOTO_RATE 2 /* slew rate, degrees/s */ |
| #define | SLEW_RATE 0.5 /* slew rate, degrees/s */ |
| #define | FINE_SLEW_RATE 0.1 /* slew rate, degrees/s */ |
| #define | SID_RATE 0.004178 /* sidereal rate, degrees/s */ |
| #define | GOTO_LIMIT 5 /* Move at GOTO_RATE until distance from target is GOTO_LIMIT degrees */ |
| #define | SLEW_LIMIT 2 /* Move at SLEW_LIMIT until distance from target is SLEW_LIMIT degrees */ |
| #define | FINE_SLEW_LIMIT 0.5 /* Move at FINE_SLEW_RATE until distance from target is FINE_SLEW_LIMIT degrees */ |
| #define | GOTO_ITERATIVE_LIMIT 5 /* Max GOTO Iterations */ |
| #define | RAGOTORESOLUTION 5 /* GOTO Resolution in arcsecs */ |
| #define | DEGOTORESOLUTION 5 /* GOTO Resolution in arcsecs */ |
| #define | SLEWMODES 11 |
| #define | RA_AXIS 0 |
| #define | DEC_AXIS 1 |
| #define | GUIDE_NORTH 0 |
| #define | GUIDE_SOUTH 1 |
| #define | GUIDE_WEST 0 |
| #define | GUIDE_EAST 1 |
Functions | |
| std::unique_ptr< EQMod > | eqmod (new EQMod()) |
| void | ISGetProperties (const char *dev) |
| Get Device Properties. More... | |
| void | ISNewSwitch (const char *dev, const char *name, ISState *states, char *names[], int num) |
| Update the value of an existing switch vector property. More... | |
| void | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int num) |
| Update the value of an existing text vector property. More... | |
| void | ISNewNumber (const char *dev, const char *name, double values[], char *names[], int num) |
| void | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| Update data of an existing blob vector property. More... | |
| void | ISSnoopDevice (XMLEle *root) |
| Function defined by Drivers that is called when another Driver it is snooping (by having previously called IDSnoopDevice()) sent any INDI message. More... | |
Variables | |
| double | slewspeeds [SLEWMODES - 1] = { 1.0, 2.0, 4.0, 8.0, 32.0, 64.0, 128.0, 600.0, 700.0, 800.0 } |
| double | defaultspeed = 64.0 |
| int | DBG_SCOPE_STATUS |
| int | DBG_COMM |
| int | DBG_MOUNT |
Macro Definition Documentation
◆ DEC_AXIS
| #define DEC_AXIS 1 |
◆ DEGOTORESOLUTION
| #define DEGOTORESOLUTION 5 /* GOTO Resolution in arcsecs */ |
◆ DEVICE_NAME
| #define DEVICE_NAME "EQMod Mount" |
◆ FINE_SLEW_LIMIT
| #define FINE_SLEW_LIMIT 0.5 /* Move at FINE_SLEW_RATE until distance from target is FINE_SLEW_LIMIT degrees */ |
◆ FINE_SLEW_RATE
| #define FINE_SLEW_RATE 0.1 /* slew rate, degrees/s */ |
◆ GOTO_ITERATIVE_LIMIT
| #define GOTO_ITERATIVE_LIMIT 5 /* Max GOTO Iterations */ |
◆ GOTO_LIMIT
◆ GOTO_RATE
| #define GOTO_RATE 2 /* slew rate, degrees/s */ |
◆ GUIDE_EAST
| #define GUIDE_EAST 1 |
◆ GUIDE_NORTH
| #define GUIDE_NORTH 0 |
◆ GUIDE_SOUTH
| #define GUIDE_SOUTH 1 |
◆ GUIDE_WEST
| #define GUIDE_WEST 0 |
◆ RA_AXIS
| #define RA_AXIS 0 |
◆ RAGOTORESOLUTION
| #define RAGOTORESOLUTION 5 /* GOTO Resolution in arcsecs */ |
◆ SID_RATE
| #define SID_RATE 0.004178 /* sidereal rate, degrees/s */ |
◆ SLEW_LIMIT
| #define SLEW_LIMIT 2 /* Move at SLEW_LIMIT until distance from target is SLEW_LIMIT degrees */ |
◆ SLEW_RATE
| #define SLEW_RATE 0.5 /* slew rate, degrees/s */ |
◆ SLEWMODES
| #define SLEWMODES 11 |
Function Documentation
◆ eqmod()
| std::unique_ptr<EQMod> eqmod | ( | new | EQMod() | ) |
◆ ISNewNumber()
Variable Documentation
◆ DBG_COMM
| int DBG_COMM |
◆ DBG_MOUNT
| int DBG_MOUNT |
◆ DBG_SCOPE_STATUS
| int DBG_SCOPE_STATUS |
◆ defaultspeed
| double defaultspeed = 64.0 |
◆ slewspeeds
| double slewspeeds[SLEWMODES - 1] = { 1.0, 2.0, 4.0, 8.0, 32.0, 64.0, 128.0, 600.0, 700.0, 800.0 } |
