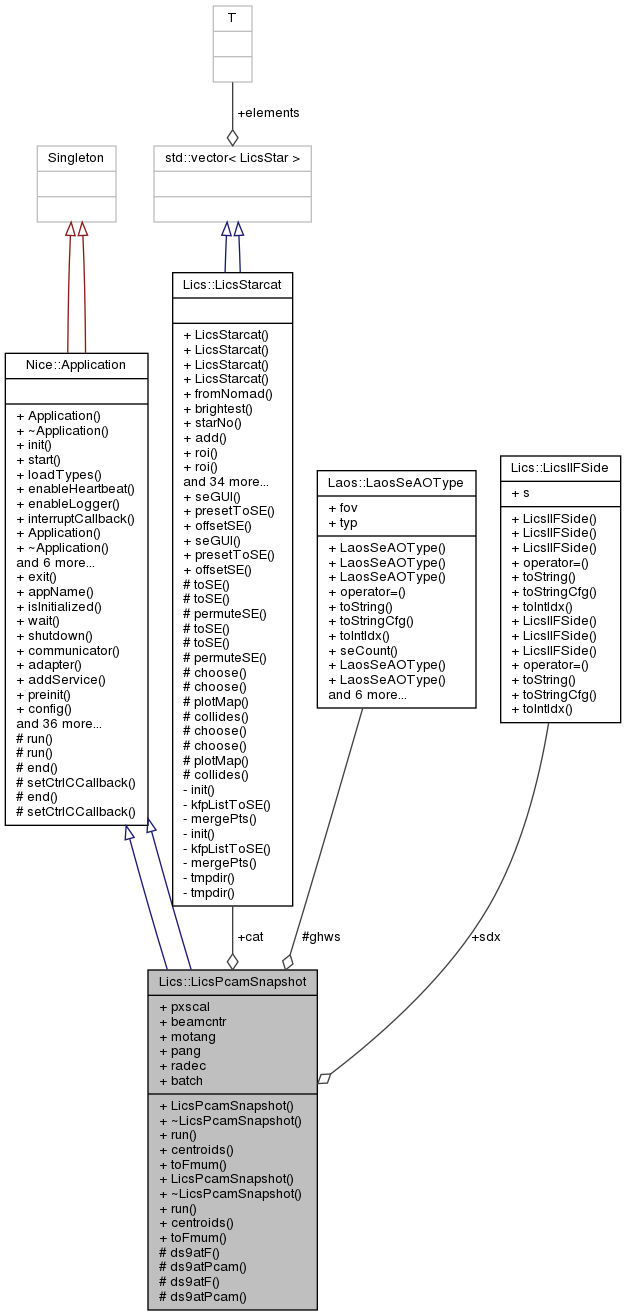
A one-time snapshot of an image from the buffer of the Patrol Camera. More...
#include <LicsPcamSnapshot.h>

Public Member Functions | |
| LicsPcamSnapshot (const Lics::LicsIIFSide &sxordx, const Laos::LaosSeAOType &ao, const std::string &catfil, const double mang, const double parang, const double ra, const double dec, bool bat) | |
| constructor specifiying one of the two sides. More... | |
| ~LicsPcamSnapshot () | |
| close the ICE interface. More... | |
| int | run (int argc, char *argv[]) |
| The function which will be called intermediately through Application::start() More... | |
| Nice::SeqPoint | centroids (Basda::Image< ushort > &img) |
| Extract star centroids from the image via sex(1). More... | |
| Nice::SeqPoint | toFmum (const Nice::SeqPoint pxlst) |
| Convert Pcam pixel coordinates to SE F coordinates. More... | |
| LicsPcamSnapshot (const Lics::LicsIIFSide &sxordx, const Laos::LaosSeAOType &ao, const std::string &catfil, const double mang, const double parang, const double ra, const double dec, bool bat) | |
| ~LicsPcamSnapshot () | |
| int | run (int argc, char *argv[]) |
| Nice::SeqPoint | centroids (Basda::Image< ushort > &img) |
| Nice::SeqPoint | toFmum (const Nice::SeqPoint pxlst) |
 Public Member Functions inherited from Nice::Application Public Member Functions inherited from Nice::Application | |
| Application () | |
| ~Application () | |
| int | init (int &, char *[]) |
| int | start (int, char *[]) |
| void | loadTypes () |
| void | enableHeartbeat () |
| void | enableLogger () |
| virtual void | interruptCallback (int _i) |
| Application () | |
| ~Application () | |
| int | init (int &, char *[]) |
| int | start (int, char *[]) |
| void | loadTypes () |
| void | enableHeartbeat () |
| void | enableLogger () |
| virtual void | interruptCallback (int _i) |
Public Attributes | |
| Lics::LicsIIFSide | sdx |
| Specifies SX or DX. More... | |
| float | pxscal |
| pixel scale [deg/pix] More... | |
| float | beamcntr [2] |
| The pixel coordinates of the beam center on the Patrol camera. More... | |
| Lics::LicsStarcat | cat |
| the star catalog provided on the command line More... | |
| double | motang |
| K-mirror motor angle [rad]. More... | |
| double | pang |
| parallactic angle [rad] More... | |
| double | radec [2] |
| right ascension and declination [deg] More... | |
| bool | batch |
| flag for batch-type (non-GUI) operation More... | |
Protected Member Functions | |
| void | ds9atF (Basda::Image< ushort > &img) const |
| Show the PCAM picture in SE coordinates with ds9(1). More... | |
| void | ds9atPcam (Basda::Image< ushort > &img) const |
| Show the PCAM picture plus the stars with ds9(1). More... | |
| void | ds9atF (Basda::Image< ushort > &img) const |
| void | ds9atPcam (Basda::Image< ushort > &img) const |
Protected Attributes | |
| Laos::LaosSeAOType | ghws |
| the type of focal plane. HWS or Pcam in this application const static Laos::LaosSeAOType ghws; More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from Nice::Application | |
| static void | exit (int) |
| static const char * | appName () |
| static bool | isInitialized () |
| static void | wait () |
| static void | shutdown (int _int=0) |
| static Ice::CommunicatorPtr | communicator () |
| static Ice::ObjectAdapterPtr | adapter (const std::string &="") |
| static const Ice::ObjectPrx & | addService (const std::string &_name, Ice::ObjectPtr &_object) |
| static JointPtr | preinit () |
| static JointPtr | config (const std::string &_node="") |
| static Nice::JointPtr | loadFile (const std::string &_filename) |
| static Nice::PrioThreadPoolPtr | threadpool () |
| static void | startHeartbeat () |
| static void | startLogger () |
| static void | distribute (const Nice::JointPtr &_seed, bool _recursive=true) |
| static std::string | fileByPath (const std::string _filename, bool _create=false) |
| static void | destroyOnInterrupt () |
| static void | shutdownOnInterrupt () |
| static void | ignoreInterrupt () |
| static void | callbackOnInterrupt () |
| static void | holdInterrupt () |
| static void | releaseInterrupt () |
| static bool | interrupted () |
| static void | exit (int) |
| static const char * | appName () |
| static bool | isInitialized () |
| static void | wait () |
| static void | shutdown (int _int=0) |
| static Ice::CommunicatorPtr | communicator () |
| static Ice::ObjectAdapterPtr | adapter (const std::string &="") |
| static const Ice::ObjectPrx & | addService (const std::string &_name, Ice::ObjectPtr &_object) |
| static JointPtr | preinit () |
| static JointPtr | config (const std::string &_node="") |
| static Nice::JointPtr | loadFile (const std::string &_filename) |
| static Nice::PrioThreadPoolPtr | threadpool () |
| static void | startHeartbeat () |
| static void | startLogger () |
| static void | distribute (const Nice::JointPtr &_seed, bool _recursive=true) |
| static std::string | fileByPath (const std::string _filename, bool _create=false) |
| static void | destroyOnInterrupt () |
| static void | shutdownOnInterrupt () |
| static void | ignoreInterrupt () |
| static void | callbackOnInterrupt () |
| static void | holdInterrupt () |
| static void | releaseInterrupt () |
| static bool | interrupted () |
| Static Protected Member Functions inherited from Nice::Application | |
| static int | end (int) |
| static void | setCtrlCCallback (IceUtil::CtrlCHandlerCallback) |
| static int | end (int) |
| static void | setCtrlCCallback (IceUtil::CtrlCHandlerCallback) |
Detailed Description
A one-time snapshot of an image from the buffer of the Patrol Camera.
- Since
- 2017-08-21
Constructor & Destructor Documentation
◆ LicsPcamSnapshot() [1/2]
| Lics::LicsPcamSnapshot::LicsPcamSnapshot | ( | const Lics::LicsIIFSide & | sxordx, |
| const Laos::LaosSeAOType & | ao, | ||
| const std::string & | catfil, | ||
| const double | mang, | ||
| const double | parang, | ||
| const double | ra, | ||
| const double | dec, | ||
| bool | bat | ||
| ) |
constructor specifiying one of the two sides.
- Parameters
-
sxordx Specifies SX or DX. catfil optional name of the star catalog file in the durrent file system mang K-mirror nominal angle in radians. parang parallactic angle in radians. ra right ascension in degrees dec declination in degrees
- Since
- 2018-08-21
◆ ~LicsPcamSnapshot() [1/2]
| Lics::LicsPcamSnapshot::~LicsPcamSnapshot | ( | ) |
close the ICE interface.
◆ LicsPcamSnapshot() [2/2]
| Lics::LicsPcamSnapshot::LicsPcamSnapshot | ( | const Lics::LicsIIFSide & | sxordx, |
| const Laos::LaosSeAOType & | ao, | ||
| const std::string & | catfil, | ||
| const double | mang, | ||
| const double | parang, | ||
| const double | ra, | ||
| const double | dec, | ||
| bool | bat | ||
| ) |
◆ ~LicsPcamSnapshot() [2/2]
| Lics::LicsPcamSnapshot::~LicsPcamSnapshot | ( | ) |
Member Function Documentation
◆ centroids() [1/2]
| Nice::SeqPoint Lics::LicsPcamSnapshot::centroids | ( | Basda::Image< ushort > & | img | ) |
Extract star centroids from the image via sex(1).
- Parameters
-
[in] img The reasonably recent Pcam image (of this side).
- Returns
- A list of pixel coordinates in the pcam image. The number of coordinates is freely defined by the noise threshold through the sex(1) configuration here, not related to the star catalogu defined elsewhere. The pixel coordintates are in the FITS-system, where the lower left coordinate is (1,1). The pixel sequence is sorted with the brightest stars first, the faintest last.
- Since
- 2017-08-22
◆ centroids() [2/2]
| Nice::SeqPoint Lics::LicsPcamSnapshot::centroids | ( | Basda::Image< ushort > & | img | ) |
◆ ds9atF() [1/2]
|
protected |
Show the PCAM picture in SE coordinates with ds9(1).
- Parameters
-
img The Basda image. The 2D array of numbers of the PCam.
The procedure pops up a ds9 window which shows the patrol camera image properly flipped (to account for the dichroic between Pcam and SE arms) and rotated (by the angle implicit in the measurements of 03/2017). It also shows the coordinate system of the SE motors in units of micrometers as used everywhere in the GUIs. It does shows (predicted) star positions of the catalog in small boxes.
- Since
- 2017-10-24
- Todo:
- work precession into the positions and counter-rotate the ra/dec to J2000.
- Parameters
-
img The Basda image. The 2D array of numbers of the PCam.
The procedure pops up a ds9 window which shows the patrol camera image properly flipped (to account for the dichroic between Pcam and SE arms) and rotated (by the angle implicit in the measurements of 03/2017). It also shows the coordinate system of the SE motors in units of micrometers as used everywhere in the GUIs. It does shows (predicted) star positions of the catalog in small boxes.
- Since
- 2017-10-24
- Todo:
- work precession into the positions and counter-rotate the ra/dec to J2000.
◆ ds9atF() [2/2]
|
protected |
◆ ds9atPcam() [1/2]
|
protected |
Show the PCAM picture plus the stars with ds9(1).
- Parameters
-
img The Basda image. The 2D array of numbers of the PCam.
The procedure pops up a ds9 window which shows the patrol camera image in its native orientation and the stars marked by squares.
- Since
- 2017-11-17
◆ ds9atPcam() [2/2]
|
protected |
◆ run() [1/2]
|
virtual |
Implements Nice::Application.
◆ run() [2/2]
|
virtual |
The function which will be called intermediately through Application::start()
First use case (if the star catalog is empty): The function tries to connect to laos.{sx|dx}.hws.pcam.ccd47-svr and to retrieve a single image on that specific side. It runs sex(1) through the image to extract the center coordinates of a set of stars (with a criterion that these must raise above the background by a factor of 2). These pixel coordinates within the patrcol camera are then converted with the affine mapping from experiments of Feb 2017 to micrometers in the HWS star enlarger plane. For each of these positions in the SE plane, we proceed with the same algorithm as in the GWS case:
- a list of SE arms (of size between none and 8) is collected that can reach that point.
- For all possible mixes of assigments of points to SE arms we check whether that assignment would lead to a SE overlap (defined by an overlap in the contour of the SE pairs once positioined). We accept assignments where no SE position pair collides. If needed, points are dropped to reduce the number of collisions until a collision-free set of assignments is found. From all assignments which manage to assign an equal number of points, those are prefereed with a minimum total protruding distance of the SE arms into the field (along y). Note that there is no preference given to dropping faint stars preferentially.
- The best assignment of (a possible subset) of points is sent as a map of SE numbers to micron (points) to the associated HWS SE GUI and at the same time the program calls the python preset program to move the SE to these positions. [At that point, the motor controllers may still detect collisions, due to two possible simplifications here: collisions with the SE's that are not assigned are not tested here, and the motor trajectory checker looks at the entire dynamical process of moving the SE arms from the current position set to the assigned ones.]
Second use case (if the star catalog contains stars):
- Try to retrieve a single image of the Pcam on the side.
- Re-display that image with ds9 by superimposing the stars (effectively equinox 2000 but with proper motions to the current epoch) in the image. The choice of the rotation/flip depends on the ghws setting (LINC_HWS for SE, LINC_PCAM for pcam)
- Returns
- An integer as a status value. 0 if successful.
- Since
- 2017-08-21
Implements Nice::Application.
◆ toFmum() [1/2]
| Nice::SeqPoint Lics::LicsPcamSnapshot::toFmum | ( | const Nice::SeqPoint | pxlst | ) |
Convert Pcam pixel coordinates to SE F coordinates.
- Parameters
-
[in] pxlst The list of pcam pixel coordinates.
- Returns
- A list of pixel coordinates in the HWS F plane (microns).
- Since
- 2017-08-24
◆ toFmum() [2/2]
| Nice::SeqPoint Lics::LicsPcamSnapshot::toFmum | ( | const Nice::SeqPoint | pxlst | ) |
Member Data Documentation
◆ batch
| bool Lics::LicsPcamSnapshot::batch |
flag for batch-type (non-GUI) operation
◆ beamcntr
| float Lics::LicsPcamSnapshot::beamcntr |
The pixel coordinates of the beam center on the Patrol camera.
◆ cat
| Lics::LicsStarcat Lics::LicsPcamSnapshot::cat |
the star catalog provided on the command line
◆ ghws
|
protected |
the type of focal plane. HWS or Pcam in this application const static Laos::LaosSeAOType ghws;
◆ motang
| double Lics::LicsPcamSnapshot::motang |
K-mirror motor angle [rad].
◆ pang
| double Lics::LicsPcamSnapshot::pang |
parallactic angle [rad]
◆ pxscal
| float Lics::LicsPcamSnapshot::pxscal |
pixel scale [deg/pix]
◆ radec
| double Lics::LicsPcamSnapshot::radec |
right ascension and declination [deg]
◆ sdx
| Lics::LicsIIFSide Lics::LicsPcamSnapshot::sdx |
Specifies SX or DX.
The documentation for this class was generated from the following files:
- ln/lics/src/starcat/LicsPcamSnapshot.h
- ln/lics/src/starcat/LicsPcamSnapshot.cc
