#include <LaosDrotServiceWorkerInterface.h>

Static Public Attributes | |
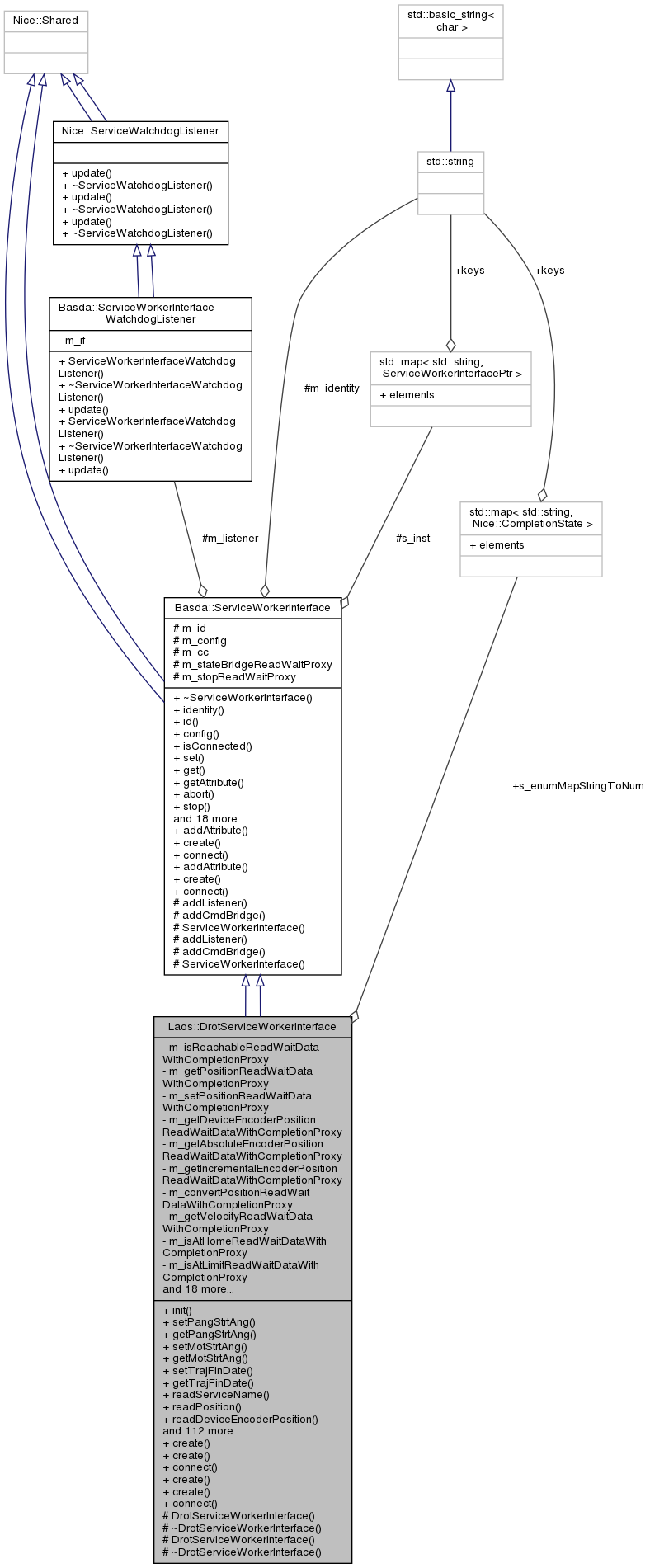
| static std::map< std::string, Nice::CompletionState > | s_enumMapStringToNum |
Protected Member Functions | |
| DrotServiceWorkerInterface (const Nice::JointPtr &, const Nice::AppConfigClientPtr &_cc=0) | |
| virtual | ~DrotServiceWorkerInterface () |
| DrotServiceWorkerInterface (const Nice::JointPtr &, const Nice::AppConfigClientPtr &_cc=0) | |
| virtual | ~DrotServiceWorkerInterface () |
 Protected Member Functions inherited from Basda::ServiceWorkerInterface Protected Member Functions inherited from Basda::ServiceWorkerInterface | |
| void | addListener () |
| template<typename BridgeType > | |
| IceUtil::Handle< BridgeType > | addCmdBridge (const std::string &_node) |
| ServiceWorkerInterface (const Nice::JointPtr &_config, const Nice::AppConfigClientPtr &_cc=0) | |
| void | addListener () |
| template<typename BridgeType > | |
| IceUtil::Handle< BridgeType > | addCmdBridge (const std::string &_node) |
| ServiceWorkerInterface (const Nice::JointPtr &_config, const Nice::AppConfigClientPtr &_cc=0) | |
Friends | |
| template<typename T > | |
| IceUtil::Handle< T > | Basda::getServiceWorkerInterfaceInstance (const Nice::JointPtr &, const std::string &) |
| template<typename T > | |
| IceUtil::Handle< T > | Basda::getServiceWorkerInterfaceInstance (const Nice::JointPtr &, const std::string &) |
Additional Inherited Members | |
| Protected Attributes inherited from Basda::ServiceWorkerInterface | |
| std::string | m_identity |
| Nice::I64 | m_id |
| Nice::JointPtr | m_config |
| Nice::AppConfigClientPtr | m_cc |
| ServiceWorkerInterfaceWatchdogListener * | m_listener |
| Nice::PropertyBridgeReadWaitProxyPtr | m_stateBridgeReadWaitProxy |
| Basda::ServiceWorkerReadWaitCompletionProxyPtr | m_stopReadWaitProxy |
| Static Protected Attributes inherited from Basda::ServiceWorkerInterface | |
| static std::map< std::string, ServiceWorkerInterfacePtr > | s_inst |
Member Typedef Documentation
◆ ChangeDerotationWithAbsoluteOffsetReadWaitDataWithCompletionProxyPtr [1/2]
◆ ChangeDerotationWithAbsoluteOffsetReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ ChangeDerotationWithRelativeOffsetReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ ChangeDerotationWithRelativeOffsetReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ ConvertPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ ConvertPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetAbsoluteEncoderPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetAbsoluteEncoderPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetDeviceEncoderPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetDeviceEncoderPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetIncrementalEncoderPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetIncrementalEncoderPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetKFPCoordinatesReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetKFPCoordinatesReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetLINCstationReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetLINCstationReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetNamedPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetNamedPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetParallacticAngleReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetParallacticAngleReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetPresetStarsReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetPresetStarsReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetRAReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetRAReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ GetVelocityReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ GetVelocityReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ IsAtHomeReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ IsAtHomeReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ IsAtLimitReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ IsAtLimitReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ IsMovingReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ IsMovingReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ IsReachableReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ IsReachableReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ IsSlewingReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ IsSlewingReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ MoveAbsoluteReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ MoveAbsoluteReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ MoveRelativeReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ MoveRelativeReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ MoveToHomeReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ MoveToHomeReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ MoveToLimitReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ MoveToLimitReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ MoveToNamedPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ MoveToNamedPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ RewindReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ RewindReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ SetPositionReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ SetPositionReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ StartDerotationHereReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ StartDerotationHereReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
◆ StartDerotationReadWaitDataWithCompletionProxyPtr [1/2]
|
private |
◆ StartDerotationReadWaitDataWithCompletionProxyPtr [2/2]
|
private |
Member Enumeration Documentation
◆ CMDS [1/2]
| Enumerator | |
|---|---|
| ISREACHABLE | |
| GETPOSITION | |
| SETPOSITION | |
| GETDEVICEENCODERPOSITION | |
| GETABSOLUTEENCODERPOSITION | |
| GETINCREMENTALENCODERPOSITION | |
| CONVERTPOSITION | |
| GETVELOCITY | |
| ISATHOME | |
| ISATLIMIT | |
| ISMOVING | |
| GETNAMEDPOSITION | |
| GETRA | |
| CHANGEDEROTATIONWITHABSOLUTEOFFSET | |
| CHANGEDEROTATIONWITHRELATIVEOFFSET | |
| GETKFPCOORDINATES | |
| GETPRESETSTARS | |
| GETLINCSTATION | |
| GETPARALLACTICANGLE | |
| ISSLEWING | |
| MOVERELATIVE | |
| MOVEABSOLUTE | |
| MOVETOHOME | |
| REWIND | |
| MOVETOLIMIT | |
| MOVETONAMEDPOSITION | |
| STARTDEROTATION | |
| STARTDEROTATIONHERE | |
| ISREACHABLE | |
| GETPOSITION | |
| SETPOSITION | |
| GETDEVICEENCODERPOSITION | |
| GETABSOLUTEENCODERPOSITION | |
| GETINCREMENTALENCODERPOSITION | |
| CONVERTPOSITION | |
| GETVELOCITY | |
| ISATHOME | |
| ISATLIMIT | |
| ISMOVING | |
| GETNAMEDPOSITION | |
| GETRA | |
| CHANGEDEROTATIONWITHABSOLUTEOFFSET | |
| CHANGEDEROTATIONWITHRELATIVEOFFSET | |
| GETKFPCOORDINATES | |
| GETPRESETSTARS | |
| GETLINCSTATION | |
| GETPARALLACTICANGLE | |
| ISSLEWING | |
| MOVERELATIVE | |
| MOVEABSOLUTE | |
| MOVETOHOME | |
| REWIND | |
| MOVETOLIMIT | |
| MOVETONAMEDPOSITION | |
| STARTDEROTATION | |
| STARTDEROTATIONHERE | |
◆ CMDS [2/2]
| Enumerator | |
|---|---|
| ISREACHABLE | |
| GETPOSITION | |
| SETPOSITION | |
| GETDEVICEENCODERPOSITION | |
| GETABSOLUTEENCODERPOSITION | |
| GETINCREMENTALENCODERPOSITION | |
| CONVERTPOSITION | |
| GETVELOCITY | |
| ISATHOME | |
| ISATLIMIT | |
| ISMOVING | |
| GETNAMEDPOSITION | |
| GETRA | |
| CHANGEDEROTATIONWITHABSOLUTEOFFSET | |
| CHANGEDEROTATIONWITHRELATIVEOFFSET | |
| GETKFPCOORDINATES | |
| GETPRESETSTARS | |
| GETLINCSTATION | |
| GETPARALLACTICANGLE | |
| ISSLEWING | |
| MOVERELATIVE | |
| MOVEABSOLUTE | |
| MOVETOHOME | |
| REWIND | |
| MOVETOLIMIT | |
| MOVETONAMEDPOSITION | |
| STARTDEROTATION | |
| STARTDEROTATIONHERE | |
| ISREACHABLE | |
| GETPOSITION | |
| SETPOSITION | |
| GETDEVICEENCODERPOSITION | |
| GETABSOLUTEENCODERPOSITION | |
| GETINCREMENTALENCODERPOSITION | |
| CONVERTPOSITION | |
| GETVELOCITY | |
| ISATHOME | |
| ISATLIMIT | |
| ISMOVING | |
| GETNAMEDPOSITION | |
| GETRA | |
| CHANGEDEROTATIONWITHABSOLUTEOFFSET | |
| CHANGEDEROTATIONWITHRELATIVEOFFSET | |
| GETKFPCOORDINATES | |
| GETPRESETSTARS | |
| GETLINCSTATION | |
| GETPARALLACTICANGLE | |
| ISSLEWING | |
| MOVERELATIVE | |
| MOVEABSOLUTE | |
| MOVETOHOME | |
| REWIND | |
| MOVETOLIMIT | |
| MOVETONAMEDPOSITION | |
| STARTDEROTATION | |
| STARTDEROTATIONHERE | |
Constructor & Destructor Documentation
◆ DrotServiceWorkerInterface() [1/2]
|
protected |
◆ ~DrotServiceWorkerInterface() [1/2]
|
protectedvirtual |
◆ DrotServiceWorkerInterface() [2/2]
|
protected |
◆ ~DrotServiceWorkerInterface() [2/2]
|
protectedvirtual |
Member Function Documentation
◆ changeDerotationWithAbsoluteOffset() [1/2]
| void Laos::DrotServiceWorkerInterface::changeDerotationWithAbsoluteOffset | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ changeDerotationWithAbsoluteOffset() [2/2]
| void Laos::DrotServiceWorkerInterface::changeDerotationWithAbsoluteOffset | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ changeDerotationWithRelativeOffset() [1/2]
| void Laos::DrotServiceWorkerInterface::changeDerotationWithRelativeOffset | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ changeDerotationWithRelativeOffset() [2/2]
| void Laos::DrotServiceWorkerInterface::changeDerotationWithRelativeOffset | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ connect() [1/2]
|
static |
◆ connect() [2/2]
|
static |
◆ convertPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::convertPosition | ( | double | _position, |
| bool | _absolute, | ||
| std::string | _unit_from, | ||
| std::string | _unit_to | ||
| ) |
◆ convertPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::convertPosition | ( | double | _position, |
| bool | _absolute, | ||
| std::string | _unit_from, | ||
| std::string | _unit_to | ||
| ) |
◆ create() [1/4]
|
static |
◆ create() [2/4]
|
static |
◆ create() [3/4]
|
static |
◆ create() [4/4]
|
static |
◆ getAbsoluteEncoderPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::getAbsoluteEncoderPosition | ( | ) |
◆ getAbsoluteEncoderPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::getAbsoluteEncoderPosition | ( | ) |
◆ getDeviceEncoderPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::getDeviceEncoderPosition | ( | std::string | _unit = "STEPS" | ) |
◆ getDeviceEncoderPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::getDeviceEncoderPosition | ( | std::string | _unit = "STEPS" | ) |
◆ getIncrementalEncoderPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::getIncrementalEncoderPosition | ( | ) |
◆ getIncrementalEncoderPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::getIncrementalEncoderPosition | ( | ) |
◆ getKFPCoordinates() [1/2]
| Nice::SeqPoint Laos::DrotServiceWorkerInterface::getKFPCoordinates | ( | ) |
◆ getKFPCoordinates() [2/2]
| Nice::SeqPoint Laos::DrotServiceWorkerInterface::getKFPCoordinates | ( | ) |
◆ getLINCstation() [1/2]
| std::string Laos::DrotServiceWorkerInterface::getLINCstation | ( | ) |
◆ getLINCstation() [2/2]
| std::string Laos::DrotServiceWorkerInterface::getLINCstation | ( | ) |
◆ getMotStrtAng() [1/2]
|
inline |
◆ getMotStrtAng() [2/2]
|
inline |
◆ getNamedPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::getNamedPosition | ( | int | _named_position | ) |
◆ getNamedPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::getNamedPosition | ( | int | _named_position | ) |
◆ getPangStrtAng() [1/2]
|
inline |
◆ getPangStrtAng() [2/2]
|
inline |
◆ getParallacticAngle() [1/2]
| double Laos::DrotServiceWorkerInterface::getParallacticAngle | ( | ) |
◆ getParallacticAngle() [2/2]
| double Laos::DrotServiceWorkerInterface::getParallacticAngle | ( | ) |
◆ getPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::getPosition | ( | std::string | _unit = "STEPS" | ) |
◆ getPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::getPosition | ( | std::string | _unit = "STEPS" | ) |
◆ getPresetStars() [1/2]
| lbto::SeqPos2 Laos::DrotServiceWorkerInterface::getPresetStars | ( | ) |
◆ getPresetStars() [2/2]
| lbto::SeqPos2 Laos::DrotServiceWorkerInterface::getPresetStars | ( | ) |
◆ getRA() [1/2]
| std::string Laos::DrotServiceWorkerInterface::getRA | ( | ) |
◆ getRA() [2/2]
| std::string Laos::DrotServiceWorkerInterface::getRA | ( | ) |
◆ getTrajFinDate() [1/2]
|
inline |
◆ getTrajFinDate() [2/2]
|
inline |
◆ getVelocity() [1/2]
| double Laos::DrotServiceWorkerInterface::getVelocity | ( | ) |
◆ getVelocity() [2/2]
| double Laos::DrotServiceWorkerInterface::getVelocity | ( | ) |
◆ init() [1/2]
| void Laos::DrotServiceWorkerInterface::init | ( | ) |
◆ init() [2/2]
| void Laos::DrotServiceWorkerInterface::init | ( | ) |
◆ isAtHome() [1/2]
| bool Laos::DrotServiceWorkerInterface::isAtHome | ( | ) |
◆ isAtHome() [2/2]
| bool Laos::DrotServiceWorkerInterface::isAtHome | ( | ) |
◆ isAtLimit() [1/2]
| bool Laos::DrotServiceWorkerInterface::isAtLimit | ( | ) |
◆ isAtLimit() [2/2]
| bool Laos::DrotServiceWorkerInterface::isAtLimit | ( | ) |
◆ isMoving() [1/2]
| bool Laos::DrotServiceWorkerInterface::isMoving | ( | ) |
◆ isMoving() [2/2]
| bool Laos::DrotServiceWorkerInterface::isMoving | ( | ) |
◆ isReachable() [1/2]
| bool Laos::DrotServiceWorkerInterface::isReachable | ( | ) |
◆ isReachable() [2/2]
| bool Laos::DrotServiceWorkerInterface::isReachable | ( | ) |
◆ isSlewing() [1/2]
| bool Laos::DrotServiceWorkerInterface::isSlewing | ( | ) |
◆ isSlewing() [2/2]
| bool Laos::DrotServiceWorkerInterface::isSlewing | ( | ) |
◆ moveAbsolute() [1/2]
| void Laos::DrotServiceWorkerInterface::moveAbsolute | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveAbsolute() [2/2]
| void Laos::DrotServiceWorkerInterface::moveAbsolute | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveAbsoluteCompletion() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveAbsoluteCompletion | ( | ) |
◆ moveAbsoluteCompletion() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveAbsoluteCompletion | ( | ) |
◆ moveAbsoluteStart() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveAbsoluteStart | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveAbsoluteStart() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveAbsoluteStart | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveAbsoluteWait() [1/2]
|
virtual |
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveAbsoluteWait() [2/2]
|
virtual |
- Note
- overridden
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveRelative() [1/2]
| void Laos::DrotServiceWorkerInterface::moveRelative | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveRelative() [2/2]
| void Laos::DrotServiceWorkerInterface::moveRelative | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveRelativeCompletion() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveRelativeCompletion | ( | ) |
◆ moveRelativeCompletion() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveRelativeCompletion | ( | ) |
◆ moveRelativeStart() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveRelativeStart | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveRelativeStart() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveRelativeStart | ( | double | _position, |
| std::string | _unit = "DEGREE" |
||
| ) |
◆ moveRelativeWait() [1/2]
|
virtual |
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveRelativeWait() [2/2]
|
virtual |
- Note
- overridden
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveToHome() [1/2]
| void Laos::DrotServiceWorkerInterface::moveToHome | ( | ) |
◆ moveToHome() [2/2]
| void Laos::DrotServiceWorkerInterface::moveToHome | ( | ) |
◆ moveToHomeCompletion() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToHomeCompletion | ( | ) |
◆ moveToHomeCompletion() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToHomeCompletion | ( | ) |
◆ moveToHomeStart() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToHomeStart | ( | ) |
◆ moveToHomeStart() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToHomeStart | ( | ) |
◆ moveToHomeWait() [1/2]
|
virtual |
- Note
- overridden
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveToHomeWait() [2/2]
|
virtual |
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveToLimit() [1/2]
| void Laos::DrotServiceWorkerInterface::moveToLimit | ( | double | _limit | ) |
◆ moveToLimit() [2/2]
| void Laos::DrotServiceWorkerInterface::moveToLimit | ( | double | _limit | ) |
◆ moveToLimitCompletion() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToLimitCompletion | ( | ) |
◆ moveToLimitCompletion() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToLimitCompletion | ( | ) |
◆ moveToLimitStart() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToLimitStart | ( | double | _limit | ) |
◆ moveToLimitStart() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToLimitStart | ( | double | _limit | ) |
◆ moveToLimitWait() [1/2]
|
virtual |
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveToLimitWait() [2/2]
|
virtual |
- Note
- overridden
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveToNamedPosition() [1/2]
| void Laos::DrotServiceWorkerInterface::moveToNamedPosition | ( | int | _named_position | ) |
◆ moveToNamedPosition() [2/2]
| void Laos::DrotServiceWorkerInterface::moveToNamedPosition | ( | int | _named_position | ) |
◆ moveToNamedPositionCompletion() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToNamedPositionCompletion | ( | ) |
◆ moveToNamedPositionCompletion() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToNamedPositionCompletion | ( | ) |
◆ moveToNamedPositionStart() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToNamedPositionStart | ( | int | _named_position | ) |
◆ moveToNamedPositionStart() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::moveToNamedPositionStart | ( | int | _named_position | ) |
◆ moveToNamedPositionWait() [1/2]
|
virtual |
- Note
- overridden
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ moveToNamedPositionWait() [2/2]
|
virtual |
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ readAbsoluteEncoderPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::readAbsoluteEncoderPosition | ( | ) |
◆ readAbsoluteEncoderPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::readAbsoluteEncoderPosition | ( | ) |
◆ readDeviceEncoderPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::readDeviceEncoderPosition | ( | ) |
◆ readDeviceEncoderPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::readDeviceEncoderPosition | ( | ) |
◆ readIncrementalEncoderPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::readIncrementalEncoderPosition | ( | ) |
◆ readIncrementalEncoderPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::readIncrementalEncoderPosition | ( | ) |
◆ readPosition() [1/2]
| double Laos::DrotServiceWorkerInterface::readPosition | ( | ) |
◆ readPosition() [2/2]
| double Laos::DrotServiceWorkerInterface::readPosition | ( | ) |
◆ readServiceName() [1/2]
| std::string Laos::DrotServiceWorkerInterface::readServiceName | ( | ) |
◆ readServiceName() [2/2]
| std::string Laos::DrotServiceWorkerInterface::readServiceName | ( | ) |
◆ rewind() [1/2]
| void Laos::DrotServiceWorkerInterface::rewind | ( | Nice::Time | _durat, |
| bool | _go, | ||
| Nice::Time | _delay | ||
| ) |
◆ rewind() [2/2]
| void Laos::DrotServiceWorkerInterface::rewind | ( | Nice::Time | _durat, |
| bool | _go, | ||
| Nice::Time | _delay | ||
| ) |
◆ setMotStrtAng() [1/2]
|
inline |
◆ setMotStrtAng() [2/2]
|
inline |
◆ setPangStrtAng() [1/2]
|
inline |
◆ setPangStrtAng() [2/2]
|
inline |
◆ setPosition() [1/2]
| void Laos::DrotServiceWorkerInterface::setPosition | ( | double | _position, |
| std::string | _unit = "STEPS" |
||
| ) |
◆ setPosition() [2/2]
| void Laos::DrotServiceWorkerInterface::setPosition | ( | double | _position, |
| std::string | _unit = "STEPS" |
||
| ) |
◆ setTrajFinDate() [1/2]
|
inline |
◆ setTrajFinDate() [2/2]
|
inline |
◆ startDerotation() [1/2]
| void Laos::DrotServiceWorkerInterface::startDerotation | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ startDerotation() [2/2]
| void Laos::DrotServiceWorkerInterface::startDerotation | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ startDerotationCompletion() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationCompletion | ( | ) |
◆ startDerotationCompletion() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationCompletion | ( | ) |
◆ startDerotationHere() [1/2]
| void Laos::DrotServiceWorkerInterface::startDerotationHere | ( | const Nice::Date & | _start_date | ) |
◆ startDerotationHere() [2/2]
| void Laos::DrotServiceWorkerInterface::startDerotationHere | ( | const Nice::Date & | _start_date | ) |
◆ startDerotationHereCompletion() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationHereCompletion | ( | ) |
◆ startDerotationHereCompletion() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationHereCompletion | ( | ) |
◆ startDerotationHereStart() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationHereStart | ( | const Nice::Date & | _start_date | ) |
◆ startDerotationHereStart() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationHereStart | ( | const Nice::Date & | _start_date | ) |
◆ startDerotationHereWait() [1/2]
|
virtual |
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ startDerotationHereWait() [2/2]
|
virtual |
- Note
- overridden
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ startDerotationStart() [1/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationStart | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ startDerotationStart() [2/2]
| Nice::Completion Laos::DrotServiceWorkerInterface::startDerotationStart | ( | const Nice::Date & | _start_date, |
| double | _position, | ||
| std::string | _unit = "DEGREE" |
||
| ) |
◆ startDerotationWait() [1/2]
|
virtual |
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
◆ startDerotationWait() [2/2]
|
virtual |
- Note
- overridden
Reimplemented in Laos::DrotServiceWorkerInterfacePy, and Laos::DrotServiceWorkerInterfacePy.
Friends And Related Function Documentation
◆ Basda::getServiceWorkerInterfaceInstance [1/2]
|
friend |
◆ Basda::getServiceWorkerInterfaceInstance [2/2]
|
friend |
Member Data Documentation
◆ m_changeDerotationWithAbsoluteOffsetReadWaitDataWithCompletionProxy
|
private |
◆ m_changeDerotationWithRelativeOffsetReadWaitDataWithCompletionProxy
|
private |
◆ m_convertPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_getAbsoluteEncoderPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_getDeviceEncoderPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_getIncrementalEncoderPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_getKFPCoordinatesReadWaitDataWithCompletionProxy
|
private |
◆ m_getLINCstationReadWaitDataWithCompletionProxy
|
private |
◆ m_getNamedPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_getParallacticAngleReadWaitDataWithCompletionProxy
|
private |
◆ m_getPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_getPresetStarsReadWaitDataWithCompletionProxy
|
private |
◆ m_getRAReadWaitDataWithCompletionProxy
|
private |
◆ m_getVelocityReadWaitDataWithCompletionProxy
|
private |
◆ m_isAtHomeReadWaitDataWithCompletionProxy
|
private |
◆ m_isAtLimitReadWaitDataWithCompletionProxy
|
private |
◆ m_isMovingReadWaitDataWithCompletionProxy
|
private |
◆ m_isReachableReadWaitDataWithCompletionProxy
|
private |
◆ m_isSlewingReadWaitDataWithCompletionProxy
|
private |
◆ m_moveAbsoluteReadWaitDataWithCompletionProxy
|
private |
◆ m_moveRelativeReadWaitDataWithCompletionProxy
|
private |
◆ m_moveToHomeReadWaitDataWithCompletionProxy
|
private |
◆ m_moveToLimitReadWaitDataWithCompletionProxy
|
private |
◆ m_moveToNamedPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_rewindReadWaitDataWithCompletionProxy
|
private |
◆ m_setPositionReadWaitDataWithCompletionProxy
|
private |
◆ m_startDerotationHereReadWaitDataWithCompletionProxy
|
private |
◆ m_startDerotationReadWaitDataWithCompletionProxy
|
private |
◆ s_enumMapStringToNum
|
static |
The documentation for this class was generated from the following files:
- /home/nirva/insroot/include/Laos/Drot/LaosDrotServiceWorkerInterface.h
- ln/laos-drot/src/Interface/Laos/Drot/LaosDrotServiceWorkerInterface.cc
