|
| enum | MotorType { MOTOR_FOCUS,
MOTOR_ROTATOR
} |
| |
| enum | FirmwareVersion { VERSION_25012017,
VERSION_20122017
} |
| |
| enum | INTEGRA_HOMING_STATE { HOMING_IDLE,
HOMING_START,
HOMING_ABORT,
HOMING_COUNT
} |
| |
| enum | { CONNECTION_NONE = 1 << 0,
CONNECTION_SERIAL = 1 << 1,
CONNECTION_TCP = 1 << 2
} |
| |
| enum | { CONNECTION_NONE = 1 << 0,
CONNECTION_SERIAL = 1 << 1,
CONNECTION_TCP = 1 << 2
} |
| |
| enum | INDI_ERROR {
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4,
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4
} |
| |
| enum | DRIVER_INTERFACE {
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15),
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15)
} |
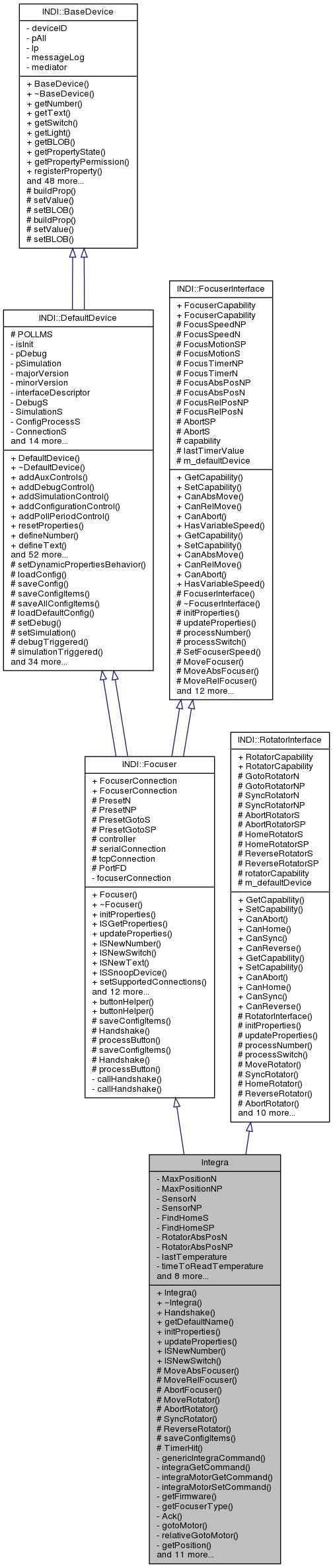
| | The DRIVER_INTERFACE enum defines the class of devices the driver implements. More...
|
| |
| enum | INDI_ERROR {
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4,
INDI_DEVICE_NOT_FOUND = -1,
INDI_PROPERTY_INVALID = -2,
INDI_PROPERTY_DUPLICATED = -3,
INDI_DISPATCH_ERROR = -4
} |
| |
| enum | DRIVER_INTERFACE {
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15),
GENERAL_INTERFACE = 0,
TELESCOPE_INTERFACE = (1 << 0),
CCD_INTERFACE = (1 << 1),
GUIDER_INTERFACE = (1 << 2),
FOCUSER_INTERFACE = (1 << 3),
FILTER_INTERFACE = (1 << 4),
DOME_INTERFACE = (1 << 5),
GPS_INTERFACE = (1 << 6),
WEATHER_INTERFACE = (1 << 7),
AO_INTERFACE = (1 << 8),
DUSTCAP_INTERFACE = (1 << 9),
LIGHTBOX_INTERFACE = (1 << 10),
DETECTOR_INTERFACE = (1 << 11),
ROTATOR_INTERFACE = (1 << 12),
SPECTROGRAPH_INTERFACE = (1 << 13),
AUX_INTERFACE = (1 << 15)
} |
| | The DRIVER_INTERFACE enum defines the class of devices the driver implements. More...
|
| |
| enum | FocusDirection { FOCUS_INWARD,
FOCUS_OUTWARD,
FOCUS_INWARD,
FOCUS_OUTWARD
} |
| |
| enum | { FOCUSER_CAN_ABS_MOVE = 1 << 0,
FOCUSER_CAN_REL_MOVE = 1 << 1,
FOCUSER_CAN_ABORT = 1 << 2,
FOCUSER_HAS_VARIABLE_SPEED = 1 << 3
} |
| |
| enum | FocusDirection { FOCUS_INWARD,
FOCUS_OUTWARD,
FOCUS_INWARD,
FOCUS_OUTWARD
} |
| |
| enum | { FOCUSER_CAN_ABS_MOVE = 1 << 0,
FOCUSER_CAN_REL_MOVE = 1 << 1,
FOCUSER_CAN_ABORT = 1 << 2,
FOCUSER_HAS_VARIABLE_SPEED = 1 << 3
} |
| |
| enum | { ROTATOR_CAN_ABORT = 1 << 0,
ROTATOR_CAN_HOME = 1 << 1,
ROTATOR_CAN_SYNC = 1 << 2,
ROTATOR_CAN_REVERSE = 1 << 3
} |
| |
| enum | { ROTATOR_CAN_ABORT = 1 << 0,
ROTATOR_CAN_HOME = 1 << 1,
ROTATOR_CAN_SYNC = 1 << 2,
ROTATOR_CAN_REVERSE = 1 << 3
} |
| |
|
| | Integra () |
| |
| virtual | ~Integra ()=default |
| |
| virtual bool | Handshake () |
| | perform handshake with device to check communication More...
|
| |
| const char * | getDefaultName () |
| |
| virtual bool | initProperties () |
| | Initilize properties initial state and value. More...
|
| |
| virtual bool | updateProperties () |
| | updateProperties is called whenever there is a change in the CONNECTION status of the driver. More...
|
| |
| virtual bool | ISNewNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| | Process the client newNumber command. More...
|
| |
| virtual bool | ISNewSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| | Process the client newSwitch command. More...
|
| |
| | Focuser () |
| |
| virtual | ~Focuser () |
| |
| virtual void | ISGetProperties (const char *dev) |
| | define the driver's properties to the client. More...
|
| |
| virtual bool | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int n) |
| | Process the client newSwitch command. More...
|
| |
| virtual bool | ISSnoopDevice (XMLEle *root) |
| | Process a snoop event from INDI server. More...
|
| |
| void | setSupportedConnections (const uint8_t &value) |
| | setConnection Set Focuser connection mode. More...
|
| |
| uint8_t | getSupportedConnections () const |
| |
| | Focuser () |
| |
| virtual | ~Focuser () |
| |
| virtual void | ISGetProperties (const char *dev) |
| | define the driver's properties to the client. More...
|
| |
| virtual bool | ISNewText (const char *dev, const char *name, char *texts[], char *names[], int n) |
| | Process the client newSwitch command. More...
|
| |
| virtual bool | ISSnoopDevice (XMLEle *root) |
| | Process a snoop event from INDI server. More...
|
| |
| void | setSupportedConnections (const uint8_t &value) |
| | setConnection Set Focuser connection mode. More...
|
| |
| uint8_t | getSupportedConnections () const |
| |
| | DefaultDevice () |
| |
| virtual | ~DefaultDevice () |
| |
| void | addAuxControls () |
| | Add Debug, Simulation, and Configuration options to the driver. More...
|
| |
| void | addDebugControl () |
| | Add Debug control to the driver. More...
|
| |
| void | addSimulationControl () |
| | Add Simulation control to the driver. More...
|
| |
| void | addConfigurationControl () |
| | Add Configuration control to the driver. More...
|
| |
| void | addPollPeriodControl () |
| | Add Polling period control to the driver. More...
|
| |
| void | resetProperties () |
| | Set all properties to IDLE state. More...
|
| |
| void | defineNumber (INumberVectorProperty *nvp) |
| | Define number vector to client & register it. More...
|
| |
| void | defineText (ITextVectorProperty *tvp) |
| | Define text vector to client & register it. More...
|
| |
| void | defineSwitch (ISwitchVectorProperty *svp) |
| | Define switch vector to client & register it. More...
|
| |
| void | defineLight (ILightVectorProperty *lvp) |
| | Define light vector to client & register it. More...
|
| |
| void | defineBLOB (IBLOBVectorProperty *bvp) |
| | Define BLOB vector to client & register it. More...
|
| |
| virtual bool | deleteProperty (const char *propertyName) |
| | Delete a property and unregister it. More...
|
| |
| virtual void | setConnected (bool status, IPState state=IPS_OK, const char *msg=nullptr) |
| | Set connection switch status in the client. More...
|
| |
| int | SetTimer (uint32_t ms) |
| | Set a timer to call the function TimerHit after ms milliseconds. More...
|
| |
| void | RemoveTimer (int id) |
| | Remove timer added with SetTimer. More...
|
| |
| virtual const char * | getDriverExec () |
| |
| virtual const char * | getDriverName () |
| |
| void | setVersion (uint16_t vMajor, uint16_t vMinor) |
| | Set driver version information to be defined in DRIVER_INFO property as vMajor.vMinor. More...
|
| |
| uint16_t | getMajorVersion () |
| |
| uint16_t | getMinorVersion () |
| |
| virtual bool | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| | Process the client newBLOB command. More...
|
| |
| virtual uint16_t | getDriverInterface () |
| |
| void | setDriverInterface (uint16_t value) |
| | setInterface Set driver interface. More...
|
| |
| | DefaultDevice () |
| |
| virtual | ~DefaultDevice () |
| |
| void | addAuxControls () |
| | Add Debug, Simulation, and Configuration options to the driver. More...
|
| |
| void | addDebugControl () |
| | Add Debug control to the driver. More...
|
| |
| void | addSimulationControl () |
| | Add Simulation control to the driver. More...
|
| |
| void | addConfigurationControl () |
| | Add Configuration control to the driver. More...
|
| |
| void | addPollPeriodControl () |
| | Add Polling period control to the driver. More...
|
| |
| void | resetProperties () |
| | Set all properties to IDLE state. More...
|
| |
| void | defineNumber (INumberVectorProperty *nvp) |
| | Define number vector to client & register it. More...
|
| |
| void | defineText (ITextVectorProperty *tvp) |
| | Define text vector to client & register it. More...
|
| |
| void | defineSwitch (ISwitchVectorProperty *svp) |
| | Define switch vector to client & register it. More...
|
| |
| void | defineLight (ILightVectorProperty *lvp) |
| | Define light vector to client & register it. More...
|
| |
| void | defineBLOB (IBLOBVectorProperty *bvp) |
| | Define BLOB vector to client & register it. More...
|
| |
| virtual bool | deleteProperty (const char *propertyName) |
| | Delete a property and unregister it. More...
|
| |
| virtual void | setConnected (bool status, IPState state=IPS_OK, const char *msg=nullptr) |
| | Set connection switch status in the client. More...
|
| |
| int | SetTimer (uint32_t ms) |
| | Set a timer to call the function TimerHit after ms milliseconds. More...
|
| |
| void | RemoveTimer (int id) |
| | Remove timer added with SetTimer. More...
|
| |
| virtual const char * | getDriverExec () |
| |
| virtual const char * | getDriverName () |
| |
| void | setVersion (uint16_t vMajor, uint16_t vMinor) |
| | Set driver version information to be defined in DRIVER_INFO property as vMajor.vMinor. More...
|
| |
| uint16_t | getMajorVersion () |
| |
| uint16_t | getMinorVersion () |
| |
| virtual bool | ISNewBLOB (const char *dev, const char *name, int sizes[], int blobsizes[], char *blobs[], char *formats[], char *names[], int n) |
| | Process the client newBLOB command. More...
|
| |
| virtual uint16_t | getDriverInterface () |
| |
| void | setDriverInterface (uint16_t value) |
| | setInterface Set driver interface. More...
|
| |
| | BaseDevice () |
| |
| virtual | ~BaseDevice () |
| |
| INumberVectorProperty * | getNumber (const char *name) |
| |
| ITextVectorProperty * | getText (const char *name) |
| |
| ISwitchVectorProperty * | getSwitch (const char *name) |
| |
| ILightVectorProperty * | getLight (const char *name) |
| |
| IBLOBVectorProperty * | getBLOB (const char *name) |
| |
| IPState | getPropertyState (const char *name) |
| |
| IPerm | getPropertyPermission (const char *name) |
| |
| void | registerProperty (void *p, INDI_PROPERTY_TYPE type) |
| |
| int | removeProperty (const char *name, char *errmsg) |
| | Remove a property. More...
|
| |
| void * | getRawProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| INDI::Property * | getProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| std::vector< INDI::Property * > * | getProperties () |
| | Return a list of all properties in the device. More...
|
| |
| bool | buildSkeleton (const char *filename) |
| | Build driver properties from a skeleton file. More...
|
| |
| bool | isConnected () |
| |
| void | setDeviceName (const char *dev) |
| | Set the device name. More...
|
| |
| const char * | getDeviceName () |
| |
| void | addMessage (const std::string &msg) |
| | Add message to the driver's message queue. More...
|
| |
| void | checkMessage (XMLEle *root) |
| |
| void | doMessage (XMLEle *msg) |
| |
| std::string | messageQueue (int index) const |
| |
| std::string | lastMessage () |
| |
| void | setMediator (INDI::BaseMediator *med) |
| | Set the driver's mediator to receive notification of news devices and updated property values. More...
|
| |
| INDI::BaseMediator * | getMediator () |
| |
| const char * | getDriverName () |
| |
| const char * | getDriverExec () |
| |
| const char * | getDriverVersion () |
| |
| | BaseDevice () |
| |
| virtual | ~BaseDevice () |
| |
| INumberVectorProperty * | getNumber (const char *name) |
| |
| ITextVectorProperty * | getText (const char *name) |
| |
| ISwitchVectorProperty * | getSwitch (const char *name) |
| |
| ILightVectorProperty * | getLight (const char *name) |
| |
| IBLOBVectorProperty * | getBLOB (const char *name) |
| |
| IPState | getPropertyState (const char *name) |
| |
| IPerm | getPropertyPermission (const char *name) |
| |
| void | registerProperty (void *p, INDI_PROPERTY_TYPE type) |
| |
| int | removeProperty (const char *name, char *errmsg) |
| | Remove a property. More...
|
| |
| void * | getRawProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| INDI::Property * | getProperty (const char *name, INDI_PROPERTY_TYPE type=INDI_UNKNOWN) |
| | Return a property and its type given its name. More...
|
| |
| std::vector< INDI::Property * > * | getProperties () |
| | Return a list of all properties in the device. More...
|
| |
| bool | buildSkeleton (const char *filename) |
| | Build driver properties from a skeleton file. More...
|
| |
| bool | isConnected () |
| |
| void | setDeviceName (const char *dev) |
| | Set the device name. More...
|
| |
| const char * | getDeviceName () |
| |
| void | addMessage (const std::string &msg) |
| | Add message to the driver's message queue. More...
|
| |
| void | checkMessage (XMLEle *root) |
| |
| void | doMessage (XMLEle *msg) |
| |
| std::string | messageQueue (int index) const |
| |
| std::string | lastMessage () |
| |
| void | setMediator (INDI::BaseMediator *med) |
| | Set the driver's mediator to receive notification of news devices and updated property values. More...
|
| |
| INDI::BaseMediator * | getMediator () |
| |
| const char * | getDriverName () |
| |
| const char * | getDriverExec () |
| |
| const char * | getDriverVersion () |
| |
| uint32_t | GetCapability () const |
| | GetFocuserCapability returns the capability of the focuser. More...
|
| |
| void | SetCapability (uint32_t cap) |
| | FI::SetCapability sets the focuser capabilities. More...
|
| |
| bool | CanAbsMove () |
| |
| bool | CanRelMove () |
| |
| bool | CanAbort () |
| |
| bool | HasVariableSpeed () |
| |
| uint32_t | GetCapability () const |
| | GetFocuserCapability returns the capability of the focuser. More...
|
| |
| void | SetCapability (uint32_t cap) |
| | FI::SetCapability sets the focuser capabilities. More...
|
| |
| bool | CanAbsMove () |
| |
| bool | CanRelMove () |
| |
| bool | CanAbort () |
| |
| bool | HasVariableSpeed () |
| |
| uint32_t | GetCapability () const |
| | GetRotatorCapability returns the capability of the Rotator. More...
|
| |
| void | SetCapability (uint32_t cap) |
| | SetRotatorCapability sets the Rotator capabilities. More...
|
| |
| bool | CanAbort () |
| |
| bool | CanHome () |
| |
| bool | CanSync () |
| |
| bool | CanReverse () |
| |
| uint32_t | GetCapability () const |
| | GetRotatorCapability returns the capability of the Rotator. More...
|
| |
| void | SetCapability (uint32_t cap) |
| | SetRotatorCapability sets the Rotator capabilities. More...
|
| |
| bool | CanAbort () |
| |
| bool | CanHome () |
| |
| bool | CanSync () |
| |
| bool | CanReverse () |
| |
|
| virtual IPState | MoveAbsFocuser (uint32_t targetTicks) |
| | MoveFocuser the focuser to an absolute position. More...
|
| |
| virtual IPState | MoveRelFocuser (FocusDirection dir, uint32_t ticks) |
| | MoveFocuser the focuser to an relative position. More...
|
| |
| virtual bool | AbortFocuser () |
| | AbortFocuser all focus motion. More...
|
| |
| virtual IPState | MoveRotator (double angle) |
| | MoveRotator Go to specific angle. More...
|
| |
| virtual bool | AbortRotator () |
| | AbortRotator Abort all motion. More...
|
| |
| virtual bool | SyncRotator (double angle) |
| | SyncRotator Set current angle as the supplied angle without moving the rotator. More...
|
| |
| virtual bool | ReverseRotator (bool enabled) |
| | ReverseRotator Reverse the direction of the rotator. More...
|
| |
| virtual bool | saveConfigItems (FILE *fp) |
| | saveConfigItems Saves the Device Port and Focuser Presets in the configuration file More...
|
| |
| virtual void | TimerHit () |
| | Callback function to be called once SetTimer duration elapses. More...
|
| |
| void | processButton (const char *button_n, ISState state) |
| |
| void | processButton (const char *button_n, ISState state) |
| |
| void | setDynamicPropertiesBehavior (bool defineEnabled, bool deleteEnabled) |
| | setDynamicPropertiesBehavior controls handling of dynamic properties. More...
|
| |
| virtual bool | loadConfig (bool silent=false, const char *property=nullptr) |
| | Load the last saved configuration file. More...
|
| |
| virtual bool | saveConfig (bool silent=false, const char *property=nullptr) |
| | Save the current properties in a configuration file. More...
|
| |
| virtual bool | saveAllConfigItems (FILE *fp) |
| | saveAllConfigItems Save all the drivers' properties in the configuration file More...
|
| |
| virtual bool | loadDefaultConfig () |
| | Load the default configuration file. More...
|
| |
| void | setDebug (bool enable) |
| | Toggle driver debug status A driver can be more verbose if Debug option is enabled by the client. More...
|
| |
| void | setSimulation (bool enable) |
| | Toggle driver simulation status A driver can run in simulation mode if Simulation option is enabled by the client. More...
|
| |
| virtual void | debugTriggered (bool enable) |
| | Inform driver that the debug option was triggered. More...
|
| |
| virtual void | simulationTriggered (bool enable) |
| | Inform driver that the simulation option was triggered. More...
|
| |
| bool | isDebug () |
| |
| bool | isSimulation () |
| |
| virtual bool | Connect () |
| | Connect to the device. More...
|
| |
| virtual bool | Disconnect () |
| | Disconnect from device. More...
|
| |
| void | registerConnection (Connection::Interface *newConnection) |
| | registerConnection Add new connection plugin to the existing connection pool. More...
|
| |
| bool | unRegisterConnection (Connection::Interface *existingConnection) |
| | unRegisterConnection Remove connection from existing pool More...
|
| |
| Connection::Interface * | getActiveConnection () |
| |
| void | setDefaultPollingPeriod (uint32_t period) |
| |
| uint32_t | getPollingPeriod () |
| |
| void | setDynamicPropertiesBehavior (bool defineEnabled, bool deleteEnabled) |
| | setDynamicPropertiesBehavior controls handling of dynamic properties. More...
|
| |
| virtual bool | loadConfig (bool silent=false, const char *property=nullptr) |
| | Load the last saved configuration file. More...
|
| |
| virtual bool | saveConfig (bool silent=false, const char *property=nullptr) |
| | Save the current properties in a configuration file. More...
|
| |
| virtual bool | saveAllConfigItems (FILE *fp) |
| | saveAllConfigItems Save all the drivers' properties in the configuration file More...
|
| |
| virtual bool | loadDefaultConfig () |
| | Load the default configuration file. More...
|
| |
| void | setDebug (bool enable) |
| | Toggle driver debug status A driver can be more verbose if Debug option is enabled by the client. More...
|
| |
| void | setSimulation (bool enable) |
| | Toggle driver simulation status A driver can run in simulation mode if Simulation option is enabled by the client. More...
|
| |
| virtual void | debugTriggered (bool enable) |
| | Inform driver that the debug option was triggered. More...
|
| |
| virtual void | simulationTriggered (bool enable) |
| | Inform driver that the simulation option was triggered. More...
|
| |
| bool | isDebug () |
| |
| bool | isSimulation () |
| |
| virtual bool | Connect () |
| | Connect to the device. More...
|
| |
| virtual bool | Disconnect () |
| | Disconnect from device. More...
|
| |
| void | registerConnection (Connection::Interface *newConnection) |
| | registerConnection Add new connection plugin to the existing connection pool. More...
|
| |
| bool | unRegisterConnection (Connection::Interface *existingConnection) |
| | unRegisterConnection Remove connection from existing pool More...
|
| |
| Connection::Interface * | getActiveConnection () |
| |
| void | setDefaultPollingPeriod (uint32_t period) |
| |
| uint32_t | getPollingPeriod () |
| |
| int | buildProp (XMLEle *root, char *errmsg) |
| | Build a property given the supplied XML element (defXXX) More...
|
| |
| int | setValue (XMLEle *root, char *errmsg) |
| | handle SetXXX commands from client More...
|
| |
| int | setBLOB (IBLOBVectorProperty *pp, XMLEle *root, char *errmsg) |
| | Parse and store BLOB in the respective vector. More...
|
| |
| int | buildProp (XMLEle *root, char *errmsg) |
| | Build a property given the supplied XML element (defXXX) More...
|
| |
| int | setValue (XMLEle *root, char *errmsg) |
| | handle SetXXX commands from client More...
|
| |
| int | setBLOB (IBLOBVectorProperty *pp, XMLEle *root, char *errmsg) |
| | Parse and store BLOB in the respective vector. More...
|
| |
| | FocuserInterface (DefaultDevice *defaultDevice) |
| |
| virtual | ~FocuserInterface ()=default |
| |
| void | initProperties (const char *groupName) |
| | Initilize focuser properties. More...
|
| |
| bool | updateProperties () |
| | updateProperties Define or Delete Rotator properties based on the connection status of the base device More...
|
| |
| bool | processNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| | Process focus number properties. More...
|
| |
| bool | processSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| | Process focus switch properties. More...
|
| |
| virtual bool | SetFocuserSpeed (int speed) |
| | SetFocuserSpeed Set Focuser speed. More...
|
| |
| virtual IPState | MoveFocuser (FocusDirection dir, int speed, uint16_t duration) |
| | MoveFocuser the focuser in a particular direction with a specific speed for a finite duration. More...
|
| |
| | FocuserInterface (DefaultDevice *defaultDevice) |
| |
| virtual | ~FocuserInterface ()=default |
| |
| void | initProperties (const char *groupName) |
| | Initilize focuser properties. More...
|
| |
| bool | updateProperties () |
| | updateProperties Define or Delete Rotator properties based on the connection status of the base device More...
|
| |
| bool | processNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| | Process focus number properties. More...
|
| |
| bool | processSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| | Process focus switch properties. More...
|
| |
| virtual bool | SetFocuserSpeed (int speed) |
| | SetFocuserSpeed Set Focuser speed. More...
|
| |
| virtual IPState | MoveFocuser (FocusDirection dir, int speed, uint16_t duration) |
| | MoveFocuser the focuser in a particular direction with a specific speed for a finite duration. More...
|
| |
| | RotatorInterface (DefaultDevice *defaultDevice) |
| |
| void | initProperties (const char *groupName) |
| | Initilize Rotator properties. More...
|
| |
| bool | updateProperties () |
| | updateProperties Define or Delete Rotator properties based on the connection status of the base device More...
|
| |
| bool | processNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| | Process Rotator number properties. More...
|
| |
| bool | processSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| | Process Rotator switch properties. More...
|
| |
| virtual IPState | HomeRotator () |
| | HomeRotator Go to home position. More...
|
| |
| | RotatorInterface (DefaultDevice *defaultDevice) |
| |
| void | initProperties (const char *groupName) |
| | Initilize Rotator properties. More...
|
| |
| bool | updateProperties () |
| | updateProperties Define or Delete Rotator properties based on the connection status of the base device More...
|
| |
| bool | processNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| | Process Rotator number properties. More...
|
| |
| bool | processSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| | Process Rotator switch properties. More...
|
| |
| virtual IPState | HomeRotator () |
| | HomeRotator Go to home position. More...
|
| |
 Public Member Functions inherited from INDI::Focuser
Public Member Functions inherited from INDI::Focuser