#include <indirotatorinterface.h>
Public Types | |
| enum | { ROTATOR_CAN_ABORT = 1 << 0, ROTATOR_CAN_HOME = 1 << 1, ROTATOR_CAN_SYNC = 1 << 2, ROTATOR_CAN_REVERSE = 1 << 3 } |
| enum | { ROTATOR_CAN_ABORT = 1 << 0, ROTATOR_CAN_HOME = 1 << 1, ROTATOR_CAN_SYNC = 1 << 2, ROTATOR_CAN_REVERSE = 1 << 3 } |
Public Member Functions | |
| uint32_t | GetCapability () const |
| GetRotatorCapability returns the capability of the Rotator. More... | |
| void | SetCapability (uint32_t cap) |
| SetRotatorCapability sets the Rotator capabilities. More... | |
| bool | CanAbort () |
| bool | CanHome () |
| bool | CanSync () |
| bool | CanReverse () |
| uint32_t | GetCapability () const |
| GetRotatorCapability returns the capability of the Rotator. More... | |
| void | SetCapability (uint32_t cap) |
| SetRotatorCapability sets the Rotator capabilities. More... | |
| bool | CanAbort () |
| bool | CanHome () |
| bool | CanSync () |
| bool | CanReverse () |
Public Attributes | |
| enum INDI::RotatorInterface:: { ... } | RotatorCapability |
| enum INDI::RotatorInterface:: { ... } | RotatorCapability |
Protected Types | |
| enum | { REVERSE_ENABLED, REVERSE_DISABLED } |
| enum | { REVERSE_ENABLED, REVERSE_DISABLED } |
Protected Member Functions | |
| RotatorInterface (DefaultDevice *defaultDevice) | |
| void | initProperties (const char *groupName) |
| Initilize Rotator properties. More... | |
| bool | updateProperties () |
| updateProperties Define or Delete Rotator properties based on the connection status of the base device More... | |
| bool | processNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| Process Rotator number properties. More... | |
| bool | processSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| Process Rotator switch properties. More... | |
| virtual IPState | MoveRotator (double angle)=0 |
| MoveRotator Go to specific angle. More... | |
| virtual bool | SyncRotator (double angle) |
| SyncRotator Set current angle as the supplied angle without moving the rotator. More... | |
| virtual IPState | HomeRotator () |
| HomeRotator Go to home position. More... | |
| virtual bool | ReverseRotator (bool enabled) |
| ReverseRotator Reverse the direction of the rotator. More... | |
| virtual bool | AbortRotator () |
| AbortRotator Abort all motion. More... | |
| RotatorInterface (DefaultDevice *defaultDevice) | |
| void | initProperties (const char *groupName) |
| Initilize Rotator properties. More... | |
| bool | updateProperties () |
| updateProperties Define or Delete Rotator properties based on the connection status of the base device More... | |
| bool | processNumber (const char *dev, const char *name, double values[], char *names[], int n) |
| Process Rotator number properties. More... | |
| bool | processSwitch (const char *dev, const char *name, ISState *states, char *names[], int n) |
| Process Rotator switch properties. More... | |
| virtual IPState | MoveRotator (double angle)=0 |
| MoveRotator Go to specific angle. More... | |
| virtual bool | SyncRotator (double angle) |
| SyncRotator Set current angle as the supplied angle without moving the rotator. More... | |
| virtual IPState | HomeRotator () |
| HomeRotator Go to home position. More... | |
| virtual bool | ReverseRotator (bool enabled) |
| ReverseRotator Reverse the direction of the rotator. More... | |
| virtual bool | AbortRotator () |
| AbortRotator Abort all motion. More... | |
Protected Attributes | |
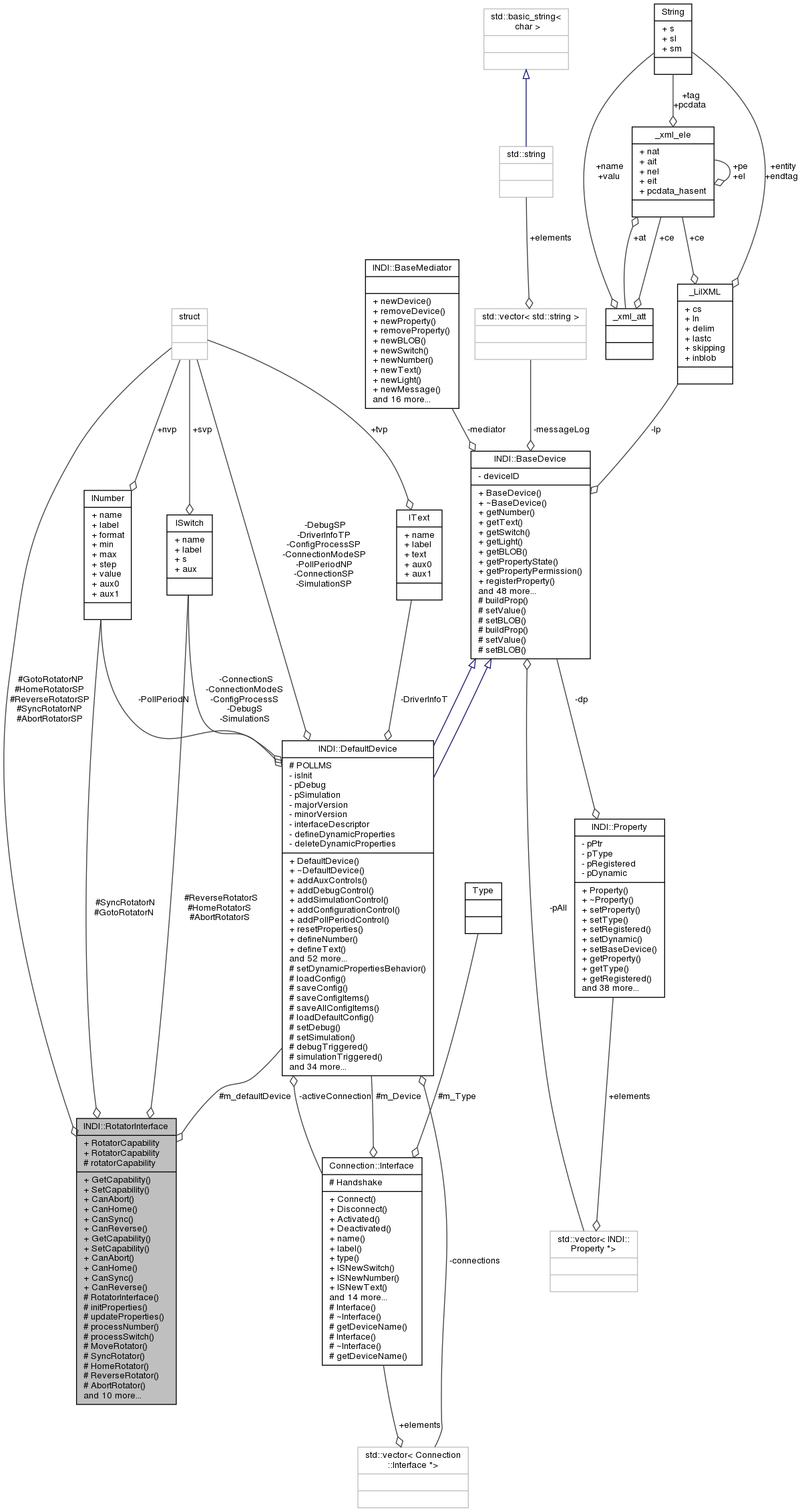
| INumber | GotoRotatorN [1] |
| INumberVectorProperty | GotoRotatorNP |
| INumber | SyncRotatorN [1] |
| INumberVectorProperty | SyncRotatorNP |
| ISwitch | AbortRotatorS [1] |
| ISwitchVectorProperty | AbortRotatorSP |
| ISwitch | HomeRotatorS [1] |
| ISwitchVectorProperty | HomeRotatorSP |
| ISwitch | ReverseRotatorS [2] |
| ISwitchVectorProperty | ReverseRotatorSP |
| uint32_t | rotatorCapability = 0 |
| DefaultDevice * | m_defaultDevice { nullptr } |
Member Enumeration Documentation
◆ anonymous enum
| anonymous enum |
◆ anonymous enum
◆ anonymous enum
| anonymous enum |
◆ anonymous enum
Constructor & Destructor Documentation
◆ RotatorInterface() [1/2]
|
explicitprotected |
◆ RotatorInterface() [2/2]
|
explicitprotected |
Member Function Documentation
◆ AbortRotator() [1/2]
|
protectedvirtual |
AbortRotator Abort all motion.
- Returns
- True if successful, false otherwise.
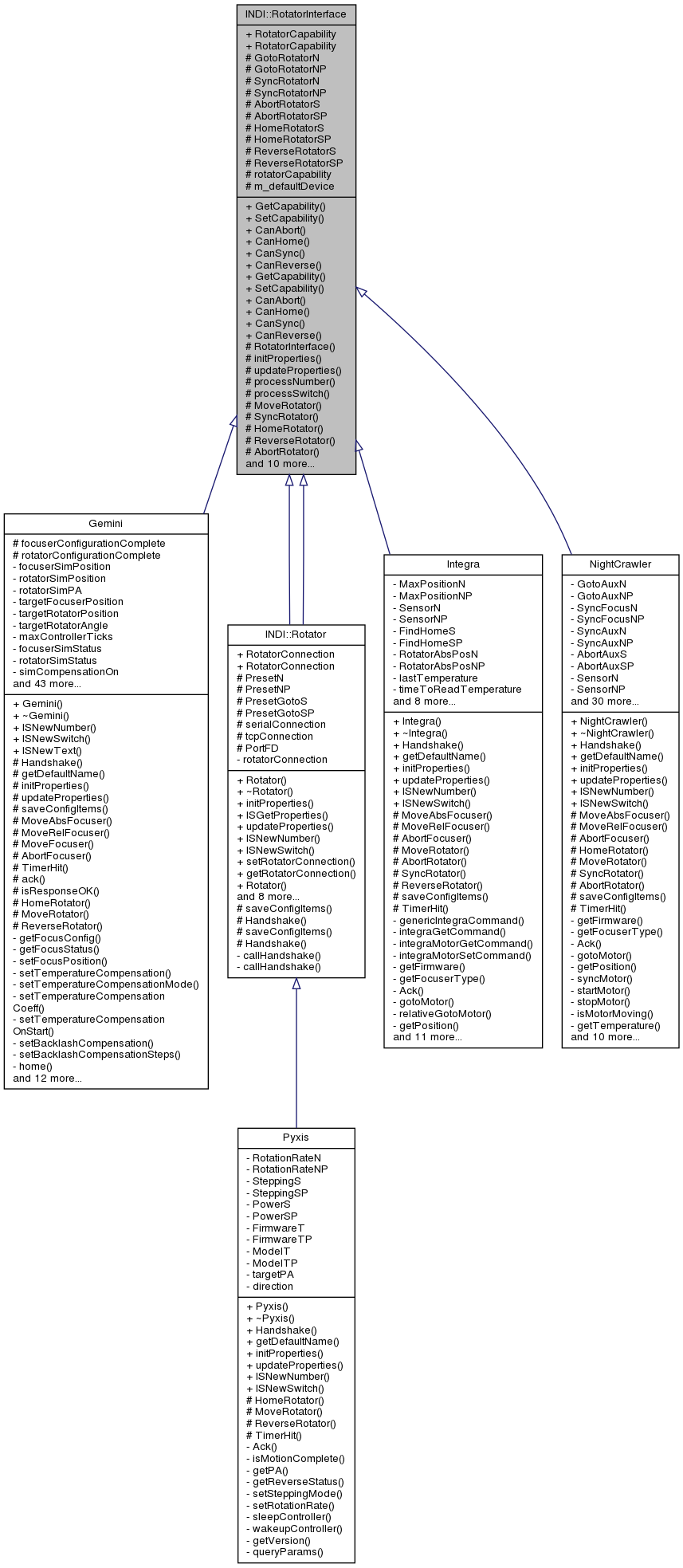
Reimplemented in Integra, and NightCrawler.
◆ AbortRotator() [2/2]
|
protectedvirtual |
AbortRotator Abort all motion.
- Returns
- True if successful, false otherwise.
Reimplemented in Integra, and NightCrawler.
◆ CanAbort() [1/2]
◆ CanAbort() [2/2]
◆ CanHome() [1/2]
◆ CanHome() [2/2]
◆ CanReverse() [1/2]
◆ CanReverse() [2/2]
◆ CanSync() [1/2]
|
inline |
- Returns
- Whether Rotator can sync ticks position to a new one.
◆ CanSync() [2/2]
|
inline |
- Returns
- Whether Rotator can sync ticks position to a new one.
◆ GetCapability() [1/2]
|
inline |
GetRotatorCapability returns the capability of the Rotator.
◆ GetCapability() [2/2]
|
inline |
GetRotatorCapability returns the capability of the Rotator.
◆ HomeRotator() [1/2]
|
protectedvirtual |
HomeRotator Go to home position.
- Returns
- State of operation: IPS_OK is motion is completed, IPS_BUSY if motion in progress, IPS_ALERT on error.
Reimplemented in Gemini, NightCrawler, and Pyxis.
◆ HomeRotator() [2/2]
|
protectedvirtual |
HomeRotator Go to home position.
- Returns
- State of operation: IPS_OK is motion is completed, IPS_BUSY if motion in progress, IPS_ALERT on error.
Reimplemented in Gemini, NightCrawler, and Pyxis.
◆ initProperties() [1/2]
|
protected |
Initilize Rotator properties.
It is recommended to call this function within initProperties() of your primary device
◆ initProperties() [2/2]
|
protected |
Initilize Rotator properties.
It is recommended to call this function within initProperties() of your primary device
◆ MoveRotator() [1/2]
|
protectedpure virtual |
MoveRotator Go to specific angle.
- Parameters
-
angle Target angle in degrees.
- Returns
- State of operation: IPS_OK is motion is completed, IPS_BUSY if motion in progress, IPS_ALERT on error.
Implemented in Gemini, Integra, NightCrawler, and Pyxis.
◆ MoveRotator() [2/2]
|
protectedpure virtual |
MoveRotator Go to specific angle.
- Parameters
-
angle Target angle in degrees.
- Returns
- State of operation: IPS_OK is motion is completed, IPS_BUSY if motion in progress, IPS_ALERT on error.
Implemented in Gemini, Integra, NightCrawler, and Pyxis.
◆ processNumber() [1/2]
|
protected |
Process Rotator number properties.
◆ processNumber() [2/2]
|
protected |
Process Rotator number properties.
◆ processSwitch() [1/2]
|
protected |
Process Rotator switch properties.
◆ processSwitch() [2/2]
|
protected |
Process Rotator switch properties.
◆ ReverseRotator() [1/2]
◆ ReverseRotator() [2/2]
◆ SetCapability() [1/2]
|
inline |
◆ SetCapability() [2/2]
|
inline |
◆ SyncRotator() [1/2]
|
protectedvirtual |
SyncRotator Set current angle as the supplied angle without moving the rotator.
- Parameters
-
ticks Desired new angle.
- Returns
- True if successful, false otherwise.
Reimplemented in Integra, and NightCrawler.
◆ SyncRotator() [2/2]
|
protectedvirtual |
SyncRotator Set current angle as the supplied angle without moving the rotator.
- Parameters
-
ticks Desired new angle.
- Returns
- True if successful, false otherwise.
Reimplemented in Integra, and NightCrawler.
◆ updateProperties() [1/2]
|
protected |
updateProperties Define or Delete Rotator properties based on the connection status of the base device
- Returns
- True if successful, false otherwise.
◆ updateProperties() [2/2]
|
protected |
updateProperties Define or Delete Rotator properties based on the connection status of the base device
- Returns
- True if successful, false otherwise.
Member Data Documentation
◆ AbortRotatorS
|
protected |
◆ AbortRotatorSP
|
protected |
◆ GotoRotatorN
|
protected |
◆ GotoRotatorNP
|
protected |
◆ HomeRotatorS
|
protected |
◆ HomeRotatorSP
|
protected |
◆ m_defaultDevice
|
protected |
◆ ReverseRotatorS
|
protected |
◆ ReverseRotatorSP
|
protected |
◆ RotatorCapability [1/2]
| enum { ... } INDI::RotatorInterface::RotatorCapability |
◆ RotatorCapability [2/2]
| enum { ... } INDI::RotatorInterface::RotatorCapability |
◆ rotatorCapability
|
protected |
◆ SyncRotatorN
|
protected |
◆ SyncRotatorNP
|
protected |
The documentation for this class was generated from the following files:
- /home/nirva/insroot/include/libindi/indirotatorinterface.h
- ln/3rdparty/src/indilib/indi-1.7.4/libindi/libs/indibase/indirotatorinterface.cpp
