#include <sstream>#include <LbtoIIFInterface.h>#include <Nice/Map.h>#include <LicsAffTrans.h>#include <LicsIIFSide.h>#include <LaosSeAOType.h>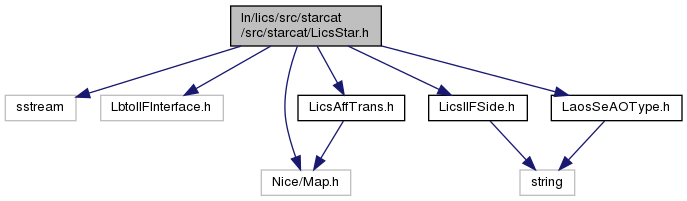

Classes | |
| class | Lics::LicsStar |
| A LbcsStar object is a single sky object with location, brightness ect. More... | |
Namespaces | |
| Lics | |
Macros | |
| #define | GREGORIAN_BACK_BENCH (18.5/DR2D) |
| The angle at which the LN focal stations are bent off the M1-M1-middle axis. More... | |
| #define | KMIRR_DIRECTION (-1) |
| Factor that maps the nominal sense of the K-mirror angles to physical mathematically positive (ccw) motions of the K-mirror if viewed from the warm dichroic. More... | |
| #define | HWS_PCAM_BETA0_SX (-151.87/DR2D) |
| The offset from the mix of K-mirror offsets to patrol camera. More... | |
| #define | HWS_PCAM_BETA0_DX (-22.12/DR2D) |
| #define | HWS_PCAM_SX_X 485.0 |
| Pixel of the beam center on the patrol camera SX x coordinate. More... | |
| #define | HWS_PCAM_SX_Y 421.0 |
| Pixel of the beam center on the patrol camera SX y coordinate. More... | |
| #define | HWS_PCAM_DX_X 488.0 |
| Pixel of the beam center on the patrol camera DX x coordinate. More... | |
| #define | HWS_PCAM_DX_Y 414.0 |
| Pixel of the beam center on the patrol camera DX y coordinate. More... | |
| #define | HWS_PCAM_PIXSIZ 13.0 |
| pixel size of each pixel on the Marconi CCD47-20 [mu] More... | |
| #define | GWS_SX_DIRECTION (+1) |
| The signs of the GWS motor angle direction relative to the mathematically positive. More... | |
| #define | GWS_DX_DIRECTION (-1) |
| #define | GWS_SE_BETA0_DX (+2.38/DR2D) |
| The offsets of the two bearing angles of the GWS relative to horizontal. More... | |
| #define | GWS_SE_BETA0_SX 0.00818 |
| #define | GWS_SX_RUNOUT_X 431.0 |
| Values by retrofitting 17 Com-2 SE assignments on SX. More... | |
| #define | GWS_SX_RUNOUT_Y (-238.0) |
| #define | GWS_DX_RUNOUT_X 0.0 |
| Values by TBD on the DX SE values. More... | |
| #define | GWS_DX_RUNOUT_Y 0.0 |
| #define | HWS_SX_RUNOUT_X 0.0 |
| Values by TBD on the SX SE values. More... | |
| #define | HWS_SX_RUNOUT_Y 0.0 |
| #define | HWS_DX_RUNOUT_X 0.0 |
| #define | HWS_DX_RUNOUT_Y 0.0 |
| #define | DR2D 57.2957795130823208767981548141 |
| 180 divided by pi More... | |
| #define | DAS2R (4.848136811095359935899141e-6) |
| Radians per arcseconds. More... | |
Macro Definition Documentation
◆ DAS2R
| #define DAS2R (4.848136811095359935899141e-6) |
Radians per arcseconds.
See sofam.h. Inverse of DR2D divided by 3600. pi/(180*3600)
◆ DR2D
| #define DR2D 57.2957795130823208767981548141 |
180 divided by pi
◆ GREGORIAN_BACK_BENCH
| #define GREGORIAN_BACK_BENCH (18.5/DR2D) |
The angle at which the LN focal stations are bent off the M1-M1-middle axis.
Radians
◆ GWS_DX_DIRECTION
| #define GWS_DX_DIRECTION (-1) |
◆ GWS_DX_RUNOUT_X
| #define GWS_DX_RUNOUT_X 0.0 |
Values by TBD on the DX SE values.
- Since
- 2017-07-01
◆ GWS_DX_RUNOUT_Y
| #define GWS_DX_RUNOUT_Y 0.0 |
◆ GWS_SE_BETA0_DX
| #define GWS_SE_BETA0_DX (+2.38/DR2D) |
The offsets of the two bearing angles of the GWS relative to horizontal.
The values that need to be added to the nominal values of the bearing to get angles that refer to the true horizontal on the platform. This has been copied from Herbst's cat2mm_E2.py , probably valid for the Pathfinder GWS DX side, and then negated for the SX side assyming that this hardware is mirror symmetric. The DX sign have been checked to agree (in output) with cat2mm_E2.py . The value of 1.3 for SX has been mentioned in a blog by T Herbst of 2017-03-22, but the sign is not clear, but it fits worse the SE measures of . licsStarcat -t 2017-06-06T03:34:25 -m /data/2017-06-Com2/targetlists/bestof_starrings10mag/sr_17.1+05.4_0023_starrings5.cat -G 0.
◆ GWS_SE_BETA0_SX
| #define GWS_SE_BETA0_SX 0.00818 |
◆ GWS_SX_DIRECTION
| #define GWS_SX_DIRECTION (+1) |
The signs of the GWS motor angle direction relative to the mathematically positive.
This catches effects from switching the roles of end switches and from the opposite sign in the multiplication factor of steps to nominal angles etc.
◆ GWS_SX_RUNOUT_X
| #define GWS_SX_RUNOUT_X 431.0 |
Values by retrofitting 17 Com-2 SE assignments on SX.
Microns. The position of the SE center is (.._X,..._Y) in the coordinate of the beam heading from the annular mirror onto the GWS SE.
- Since
- 2017-07-01
◆ GWS_SX_RUNOUT_Y
| #define GWS_SX_RUNOUT_Y (-238.0) |
◆ HWS_DX_RUNOUT_X
| #define HWS_DX_RUNOUT_X 0.0 |
◆ HWS_DX_RUNOUT_Y
| #define HWS_DX_RUNOUT_Y 0.0 |
◆ HWS_PCAM_BETA0_DX
| #define HWS_PCAM_BETA0_DX (-22.12/DR2D) |
◆ HWS_PCAM_BETA0_SX
| #define HWS_PCAM_BETA0_SX (-151.87/DR2D) |
The offset from the mix of K-mirror offsets to patrol camera.
The cpp macro converts degrees to units of radians.
◆ HWS_PCAM_DX_X
| #define HWS_PCAM_DX_X 488.0 |
Pixel of the beam center on the patrol camera DX x coordinate.
◆ HWS_PCAM_DX_Y
| #define HWS_PCAM_DX_Y 414.0 |
Pixel of the beam center on the patrol camera DX y coordinate.
◆ HWS_PCAM_PIXSIZ
| #define HWS_PCAM_PIXSIZ 13.0 |
pixel size of each pixel on the Marconi CCD47-20 [mu]
◆ HWS_PCAM_SX_X
| #define HWS_PCAM_SX_X 485.0 |
Pixel of the beam center on the patrol camera SX x coordinate.
◆ HWS_PCAM_SX_Y
| #define HWS_PCAM_SX_Y 421.0 |
Pixel of the beam center on the patrol camera SX y coordinate.
◆ HWS_SX_RUNOUT_X
| #define HWS_SX_RUNOUT_X 0.0 |
Values by TBD on the SX SE values.
- Since
- 2017-07-01
◆ HWS_SX_RUNOUT_Y
| #define HWS_SX_RUNOUT_Y 0.0 |
◆ KMIRR_DIRECTION
| #define KMIRR_DIRECTION (-1) |
Factor that maps the nominal sense of the K-mirror angles to physical mathematically positive (ccw) motions of the K-mirror if viewed from the warm dichroic.
