#include <ioptronv3driver.h>
|
| | Driver (const char *deviceName) |
| |
| | ~Driver ()=default |
| |
| bool | sendCommand (const char *command, int count=1, char *response=nullptr, uint8_t timeout=IOP_TIMEOUT, uint8_t debugLog=INDI::Logger::DBG_DEBUG) |
| |
| bool | checkConnection (int fd) |
| |
| bool | getStatus (IOPInfo *info) |
| | Get iEQ current status info. More...
|
| |
| bool | getFirmwareInfo (FirmwareInfo *info) |
| | Get All firmware informatin in addition to mount model. More...
|
| |
| bool | getCoords (double *ra, double *de, IOP_PIER_STATE *pierState, IOP_CW_STATE *cwState) |
| | Get RA/DEC. More...
|
| |
| bool | getUTCDateTime (double *JD, int *utcOffsetMinutes, bool *dayLightSaving) |
| | Get UTC JD plus utc offset and whether daylight savings is active or not. More...
|
| |
| bool | startMotion (IOP_DIRECTION dir) |
| |
| bool | stopMotion (IOP_DIRECTION dir) |
| |
| bool | setSlewRate (IOP_SLEW_RATE rate) |
| |
| bool | setCustomRATrackRate (double rate) |
| |
| bool | setTrackMode (IOP_TRACK_RATE rate) |
| |
| bool | setTrackEnabled (bool enabled) |
| |
| bool | abort () |
| |
| bool | slewNormal () |
| |
| bool | slewCWUp () |
| |
| bool | sync () |
| |
| bool | setRA (double ra) |
| |
| bool | setDE (double de) |
| |
| bool | findHome () |
| |
| bool | gotoHome () |
| |
| bool | setCurrentHome () |
| |
| bool | park () |
| |
| bool | unpark () |
| |
| bool | setGuideRate (double RARate, double DERate) |
| |
| bool | getGuideRate (double *RARate, double *DERate) |
| |
| bool | startGuide (IOP_DIRECTION dir, uint32_t ms) |
| |
| bool | setLongitude (double longitude) |
| |
| bool | setLatitude (double latitude) |
| |
| bool | setUTCDateTime (double JD) |
| |
| bool | setUTCOffset (int offsetMinutes) |
| |
| bool | setDaylightSaving (bool enabled) |
| |
| void | setDebug (bool enable) |
| |
| void | setSimulation (bool enable) |
| |
| void | setSimGPSstatus (IOP_GPS_STATUS value) |
| |
| void | setSimSytemStatus (IOP_SYSTEM_STATUS value) |
| |
| void | setSimTrackRate (IOP_TRACK_RATE value) |
| |
| void | setSimSlewRate (IOP_SLEW_RATE value) |
| |
| void | setSimTimeSource (IOP_TIME_SOURCE value) |
| |
| void | setSimHemisphere (IOP_HEMISPHERE value) |
| |
| void | setSimRA (double ra) |
| |
| void | setSimDE (double de) |
| |
| void | setSimLongLat (double longitude, double latitude) |
| |
| void | setSimGuideRate (double raRate, double deRate) |
| |
◆ Driver()
| IOPv3::Driver::Driver |
( |
const char * |
deviceName | ) |
|
|
explicit |
◆ ~Driver()
| IOPv3::Driver::~Driver |
( |
| ) |
|
|
default |
◆ abort()
| bool IOPv3::Driver::abort |
( |
void |
| ) |
|
◆ checkConnection()
| bool IOPv3::Driver::checkConnection |
( |
int |
fd | ) |
|
◆ findHome()
| bool IOPv3::Driver::findHome |
( |
| ) |
|
◆ getCoords()
◆ getFirmwareInfo()
Get All firmware informatin in addition to mount model.
◆ getGuideRate()
| bool IOPv3::Driver::getGuideRate |
( |
double * |
RARate, |
|
|
double * |
DERate |
|
) |
| |
◆ getMainFirmware()
| bool IOPv3::Driver::getMainFirmware |
( |
std::string & |
mainFirmware, |
|
|
std::string & |
controllerFirmware |
|
) |
| |
|
protected |
Get mainboard and controller firmware only.
◆ getModel()
| bool IOPv3::Driver::getModel |
( |
std::string & |
model | ) |
|
|
protected |
◆ getRADEFirmware()
| bool IOPv3::Driver::getRADEFirmware |
( |
std::string & |
RAFirmware, |
|
|
std::string & |
DEFirmware |
|
) |
| |
|
protected |
Get RA and DEC firmware info.
◆ getStatus()
Get iEQ current status info.
◆ getUTCDateTime()
| bool IOPv3::Driver::getUTCDateTime |
( |
double * |
JD, |
|
|
int * |
utcOffsetMinutes, |
|
|
bool * |
dayLightSaving |
|
) |
| |
Get UTC JD plus utc offset and whether daylight savings is active or not.
◆ gotoHome()
| bool IOPv3::Driver::gotoHome |
( |
| ) |
|
◆ park()
| bool IOPv3::Driver::park |
( |
| ) |
|
◆ sendCommand()
◆ setCurrentHome()
| bool IOPv3::Driver::setCurrentHome |
( |
| ) |
|
◆ setCustomRATrackRate()
| bool IOPv3::Driver::setCustomRATrackRate |
( |
double |
rate | ) |
|
◆ setDaylightSaving()
| bool IOPv3::Driver::setDaylightSaving |
( |
bool |
enabled | ) |
|
◆ setDE()
| bool IOPv3::Driver::setDE |
( |
double |
de | ) |
|
◆ setDebug()
| void IOPv3::Driver::setDebug |
( |
bool |
enable | ) |
|
◆ setGuideRate()
| bool IOPv3::Driver::setGuideRate |
( |
double |
RARate, |
|
|
double |
DERate |
|
) |
| |
◆ setLatitude()
| bool IOPv3::Driver::setLatitude |
( |
double |
latitude | ) |
|
◆ setLongitude()
| bool IOPv3::Driver::setLongitude |
( |
double |
longitude | ) |
|
◆ setRA()
| bool IOPv3::Driver::setRA |
( |
double |
ra | ) |
|
◆ setSimDE()
| void IOPv3::Driver::setSimDE |
( |
double |
de | ) |
|
◆ setSimGPSstatus()
◆ setSimGuideRate()
| void IOPv3::Driver::setSimGuideRate |
( |
double |
raRate, |
|
|
double |
deRate |
|
) |
| |
◆ setSimHemisphere()
◆ setSimLongLat()
| void IOPv3::Driver::setSimLongLat |
( |
double |
longitude, |
|
|
double |
latitude |
|
) |
| |
◆ setSimRA()
| void IOPv3::Driver::setSimRA |
( |
double |
ra | ) |
|
◆ setSimSlewRate()
◆ setSimSytemStatus()
◆ setSimTimeSource()
◆ setSimTrackRate()
◆ setSimulation()
| void IOPv3::Driver::setSimulation |
( |
bool |
enable | ) |
|
◆ setSlewRate()
◆ setTrackEnabled()
| bool IOPv3::Driver::setTrackEnabled |
( |
bool |
enabled | ) |
|
◆ setTrackMode()
◆ setUTCDateTime()
| bool IOPv3::Driver::setUTCDateTime |
( |
double |
JD | ) |
|
◆ setUTCOffset()
| bool IOPv3::Driver::setUTCOffset |
( |
int |
offsetMinutes | ) |
|
◆ slewCWUp()
| bool IOPv3::Driver::slewCWUp |
( |
| ) |
|
◆ slewNormal()
| bool IOPv3::Driver::slewNormal |
( |
| ) |
|
◆ startGuide()
◆ startMotion()
◆ stopMotion()
◆ sync()
| bool IOPv3::Driver::sync |
( |
| ) |
|
◆ unpark()
| bool IOPv3::Driver::unpark |
( |
| ) |
|
◆ cw_state
◆ day_light_saving
| bool IOPv3::Driver::day_light_saving |
◆ de
◆ de_guide_rate
| double IOPv3::Driver::de_guide_rate |
◆ IOP_BUFFER
◆ IOP_SLEW_RATES
| const uint16_t IOPv3::Driver::IOP_SLEW_RATES = {1, 2, 8, 16, 64, 128, 256, 512, 1024} |
|
static |
◆ IOP_TIMEOUT
◆ JD
◆ m_Debug
◆ m_DeviceName
| const char* IOPv3::Driver::m_DeviceName |
|
private |
◆ m_Simulation
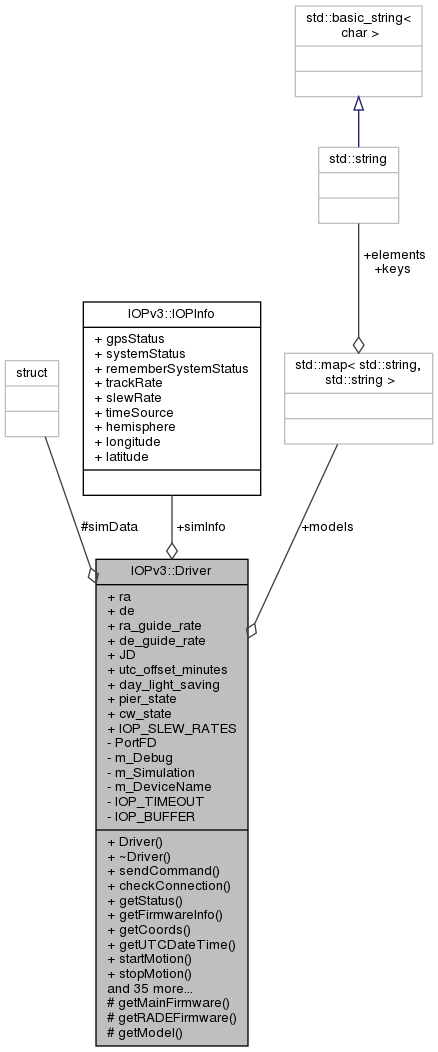
◆ models
| const std::map< std::string, std::string > IOPv3::Driver::models |
|
static |
Initial value:=
{
{"0010", "Cube II EQ"},
{"0011", "SmartEQ Pro+"},
{"0025", "CEM25"},
{"0026", "CEM25-EC"},
{"0030", "iEQ30 Pro"},
{"0045", "iEQ45 Pro EQ"},
{"0060", "CEM60"},
{"0061", "CEM60-EC"},
{"0120", "CEM120"},
{"0121", "CEM120-EC"},
{"0122", "CEM120-EC2"},
{"5010", "Cube II AA"},
{"5035", "AZ Mount Pro"},
{"5045", "iEQ45 Pro AA"}
}
◆ pier_state
◆ PortFD
| int IOPv3::Driver::PortFD = { -1 } |
|
private |
◆ ra
◆ ra_guide_rate
| double IOPv3::Driver::ra_guide_rate |
◆ simData
| struct { ... } IOPv3::Driver::simData |
◆ simInfo
◆ utc_offset_minutes
| int IOPv3::Driver::utc_offset_minutes |
The documentation for this class was generated from the following files: