|
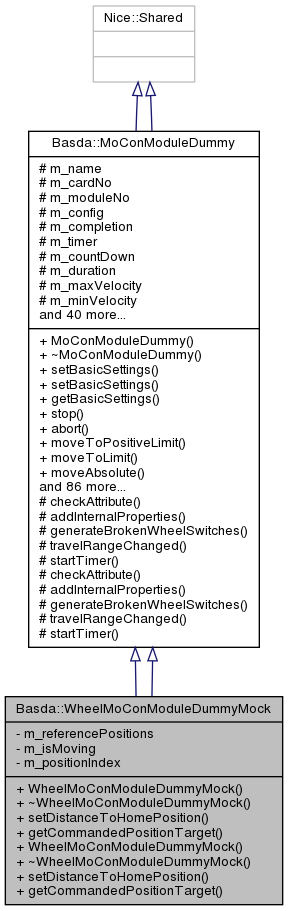
| | WheelMoConModuleDummyMock (std::string _name, const Nice::JointPtr &_config) |
| |
| virtual | ~WheelMoConModuleDummyMock () |
| |
| void | setDistanceToHomePosition (int _distance) |
| |
| int | getCommandedPositionTarget () |
| |
| | WheelMoConModuleDummyMock (std::string _name, const Nice::JointPtr &_config) |
| |
| virtual | ~WheelMoConModuleDummyMock () |
| |
| void | setDistanceToHomePosition (int _distance) |
| |
| int | getCommandedPositionTarget () |
| |
| | MoConModuleDummy (std::string _name, const Nice::JointPtr &_config) |
| |
| virtual | ~MoConModuleDummy () |
| |
| void | setBasicSettings (const SelectBasicSettings::Constant _selectID, const double _parameter) |
| |
With this method a value of the basic configuration can be changed. More...
|
| |
| void | setBasicSettings () |
| | This method sets all basic configuration with the values stored in the property tree. More...
|
| |
| void | getBasicSettings () |
| | This method returns the basic configuration of the motor. More...
|
| |
| void | stop () |
| | This method stops the motor with a deceleration. More...
|
| |
| void | abort () |
| | Abort the moving of the motor immediately without deceleration. More...
|
| |
| void | moveToPositiveLimit () |
| | The motor moves to the positive software limit switch. More...
|
| |
| void | moveToLimit (const int &_limit) |
| | move the motor to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More...
|
| |
| virtual void | moveAbsolute (const int &_position) |
| | The motor move to the absolute position. More...
|
| |
| virtual void | moveRelative (const int &_position) |
| | The motor moves to the relative position. More...
|
| |
| void | moveToNegativeLimit () |
| | The motor moves to the negative software limit switch. More...
|
| |
| virtual void | moveToHome () |
| | The motor is looking for the reference positions and reset the step counter to zero. More...
|
| |
| void | setExternalProfileBufferSize (const unsigned int _bufferSize, bool _extended=true) |
| | This method set the external buffer size. More...
|
| |
| virtual bool | isMoving () |
| | Checks if the motors is in motion. More...
|
| |
| bool | isAtHome () |
| | This method indicate whether the motor is at the home position. More...
|
| |
| bool | isMotionComplete () |
| | Checks if the motor has finished the motion. More...
|
| |
| void | setMotionComplete (bool _complete) |
| | Set the MOTOR_COMPLETE flag. More...
|
| |
| int | isAtLimit () |
| | Checks if the motors is in limit. More...
|
| |
| virtual double | getMEncPosition () |
| | Returns the current position of the motor. More...
|
| |
| double | getAEncPosition () |
| | Returns the current position of the motor. More...
|
| |
| double | getIEncPosition () |
| | Returns the current positions of the motor. More...
|
| |
| double | getVelocity () |
| | Returns the current velocity of the motor. More...
|
| |
| void | waitForEvent (Nice::Time _time, Basda::DeviceAsync &_async) |
| | This method wait till an event was received. More...
|
| |
| Nice::I64 | getReferenceTime () |
| | This method synchronize the MoCon time with the PC time. More...
|
| |
| Nice::I64 | getCurrentTime () |
| | This method returns the current MoCon time. More...
|
| |
| void | setExternalProfileData (const unsigned int _index, const unsigned int _timeBase, const int _velocity, const int _position, const int _acceleration=0, const int _jerk=0) |
| | This method set the external profile data. More...
|
| |
| void | setExternalProfileStart (const ValueStartMode::Constant _startMode, const Nice::Date _startTime=Nice::Date::microSeconds(-1)) |
| | This method starts the external profile from the beginning or from the last position. More...
|
| |
| void | setExternalProfileStop () |
| | This method starts the external profile at a defined time. More...
|
| |
| int | getExternalProfileInfo () |
| | This method returns the actual index of the external profile. More...
|
| |
| Nice::Time | initExternalProfile (int _frequency, unsigned int _maxSamplesPerSegment, unsigned int _minSamplesPerSegment, unsigned int _faultTolerance) |
| |
| void | clearExternalProfileBuffer () |
| | This method freed the allocated memory of the external profile. More...
|
| |
| void | calculateTransition (const Nice::Date &_date, const Nice::NPoint &_positionSequence) |
| | This method calculates the transition from one trajectory to another if a trajectory already exist. More...
|
| |
| void | calculateTransition (const Nice::Date &_date, const Nice::NPoint &_positionSequence, const Nice::Time &_transitionLength) |
| |
| unsigned int | fitTrajectory () |
| | This method convert the given trajectory to a motor controller profile. More...
|
| |
| void | validateExternalProfile () |
| |
| unsigned int | bufferExternalProfile () |
| |
| Nice::Date | uploadExternalProfile () |
| | This uploads the external profile data. More...
|
| |
| bool | isExternalProfileDone () |
| |
| void | uploadExternalProfile (const Nice::SeqSeqInt &_segments) |
| |
| void | setPosition (const int &_position) |
| | Change the absolute position of the motor. More...
|
| |
| Nice::Time | getLinkTimeout () |
| | This method return the TCP connection timeout. More...
|
| |
| Nice::BitSet | getPositionSwitchStatus () |
| |
| Nice::Completion | getProgress () |
| |
| void | setChatType (Nice::ChatLinePtr _chat) |
| |
| void | setCollision (bool _collisionNegative, bool _collisionPositive) |
| |
| void | setBrokenSwitches (Nice::BitSet _brokenPositionSwitchMask, int _fromPosition, int _toPosition) |
| |
| void | setWheelPositionOffset (int _positionOffset) |
| |
| | MoConModuleDummy (std::string _name, const Nice::JointPtr &_config) |
| |
| virtual | ~MoConModuleDummy () |
| |
| void | setBasicSettings (const SelectBasicSettings::Constant _selectID, const double _parameter) |
| |
With this method a value of the basic configuration can be changed. More...
|
| |
| void | setBasicSettings () |
| | This method sets all basic configuration with the values stored in the property tree. More...
|
| |
| void | getBasicSettings () |
| | This method returns the basic configuration of the motor. More...
|
| |
| void | stop () |
| | This method stops the motor with a deceleration. More...
|
| |
| void | abort () |
| | Abort the moving of the motor immediately without deceleration. More...
|
| |
| void | moveToPositiveLimit () |
| | The motor moves to the positive software limit switch. More...
|
| |
| void | moveToLimit (const int &_limit) |
| | move the motor to the positive limit switches (_limits[i]>0) or negative (_limits[i]<0) limit switches. More...
|
| |
| virtual void | moveAbsolute (const int &_position) |
| | The motor move to the absolute position. More...
|
| |
| virtual void | moveRelative (const int &_position) |
| | The motor moves to the relative position. More...
|
| |
| void | moveToNegativeLimit () |
| | The motor moves to the negative software limit switch. More...
|
| |
| virtual void | moveToHome () |
| | The motor is looking for the reference positions and reset the step counter to zero. More...
|
| |
| void | setExternalProfileBufferSize (const unsigned int _bufferSize, bool _extended=true) |
| | This method set the external buffer size. More...
|
| |
| virtual bool | isMoving () |
| | Checks if the motors is in motion. More...
|
| |
| bool | isAtHome () |
| | This method indicate whether the motor is at the home position. More...
|
| |
| bool | isMotionComplete () |
| | Checks if the motor has finished the motion. More...
|
| |
| void | setMotionComplete (bool _complete) |
| | Set the MOTOR_COMPLETE flag. More...
|
| |
| int | isAtLimit () |
| | Checks if the motors is in limit. More...
|
| |
| virtual double | getMEncPosition () |
| | Returns the current position of the motor. More...
|
| |
| double | getAEncPosition () |
| | Returns the current position of the motor. More...
|
| |
| double | getIEncPosition () |
| | Returns the current positions of the motor. More...
|
| |
| double | getVelocity () |
| | Returns the current velocity of the motor. More...
|
| |
| void | waitForEvent (Nice::Time _time, Basda::DeviceAsync &_async) |
| | This method wait till an event was received. More...
|
| |
| Nice::I64 | getReferenceTime () |
| | This method synchronize the MoCon time with the PC time. More...
|
| |
| Nice::I64 | getCurrentTime () |
| | This method returns the current MoCon time. More...
|
| |
| void | setExternalProfileData (const unsigned int _index, const unsigned int _timeBase, const int _velocity, const int _position, const int _acceleration=0, const int _jerk=0) |
| | This method set the external profile data. More...
|
| |
| void | setExternalProfileStart (const ValueStartMode::Constant _startMode, const Nice::Date _startTime=Nice::Date::microSeconds(-1)) |
| | This method starts the external profile from the beginning or from the last position. More...
|
| |
| void | setExternalProfileStop () |
| | This method starts the external profile at a defined time. More...
|
| |
| int | getExternalProfileInfo () |
| | This method returns the actual index of the external profile. More...
|
| |
| Nice::Time | initExternalProfile (int _frequency, unsigned int _maxSamplesPerSegment, unsigned int _minSamplesPerSegment, unsigned int _faultTolerance) |
| |
| void | clearExternalProfileBuffer () |
| | This method freed the allocated memory of the external profile. More...
|
| |
| void | calculateTransition (const Nice::Date &_date, const Nice::NPoint &_positionSequence) |
| | This method calculates the transition from one trajectory to another if a trajectory already exist. More...
|
| |
| void | calculateTransition (const Nice::Date &_date, const Nice::NPoint &_positionSequence, const Nice::Time &_transitionLength) |
| |
| unsigned int | fitTrajectory () |
| | This method convert the given trajectory to a motor controller profile. More...
|
| |
| void | validateExternalProfile () |
| |
| unsigned int | bufferExternalProfile () |
| |
| Nice::Date | uploadExternalProfile () |
| | This uploads the external profile data. More...
|
| |
| bool | isExternalProfileDone () |
| |
| void | uploadExternalProfile (const Nice::SeqSeqInt &_segments) |
| |
| void | setPosition (const int &_position) |
| | Change the absolute position of the motor. More...
|
| |
| Nice::Time | getLinkTimeout () |
| | This method return the TCP connection timeout. More...
|
| |
| Nice::BitSet | getPositionSwitchStatus () |
| |
| Nice::Completion | getProgress () |
| |
| void | setChatType (Nice::ChatLinePtr _chat) |
| |
| void | setCollision (bool _collisionNegative, bool _collisionPositive) |
| |
| void | setBrokenSwitches (Nice::BitSet _brokenPositionSwitchMask, int _fromPosition, int _toPosition) |
| |
| void | setWheelPositionOffset (int _positionOffset) |
| |
|
| enum | CMDS {
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
MOVEABSOLUTE,
MOVERELATIVE,
STARTEXTERNALPROFILE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
MOVEABSOLUTE,
MOVERELATIVE,
STARTEXTERNALPROFILE
} |
| |
| enum | CMDS {
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
MOVEABSOLUTE,
MOVERELATIVE,
STARTEXTERNALPROFILE,
MOVETOHOME,
MOVETOHOMESINGLE,
MOVETOLIMIT,
MOVETOPOSITIVELIMIT,
MOVETONEGATIVELIMIT,
MOVEABSOLUTE,
MOVERELATIVE,
STARTEXTERNALPROFILE
} |
| |
| template<typename Type > |
| Type | checkAttribute (const std::string &_node, const std::string &_attributeName, const Type &_default) |
| |
| void | addInternalProperties () |
| | This method add some internal properties like status properties. More...
|
| |
| void | generateBrokenWheelSwitches () |
| |
| void | travelRangeChanged (const Nice::Point &_p) |
| |
| void | startTimer (const Nice::Date _startDate) |
| | When the Date is not set (Nice::Date()) the the timer starts immediately. More...
|
| |
| template<typename Type > |
| Type | checkAttribute (const std::string &_node, const std::string &_attributeName, const Type &_default) |
| |
| void | addInternalProperties () |
| | This method add some internal properties like status properties. More...
|
| |
| void | generateBrokenWheelSwitches () |
| |
| void | travelRangeChanged (const Nice::Point &_p) |
| |
| void | startTimer (const Nice::Date _startDate) |
| | When the Date is not set (Nice::Date()) the the timer starts immediately. More...
|
| |
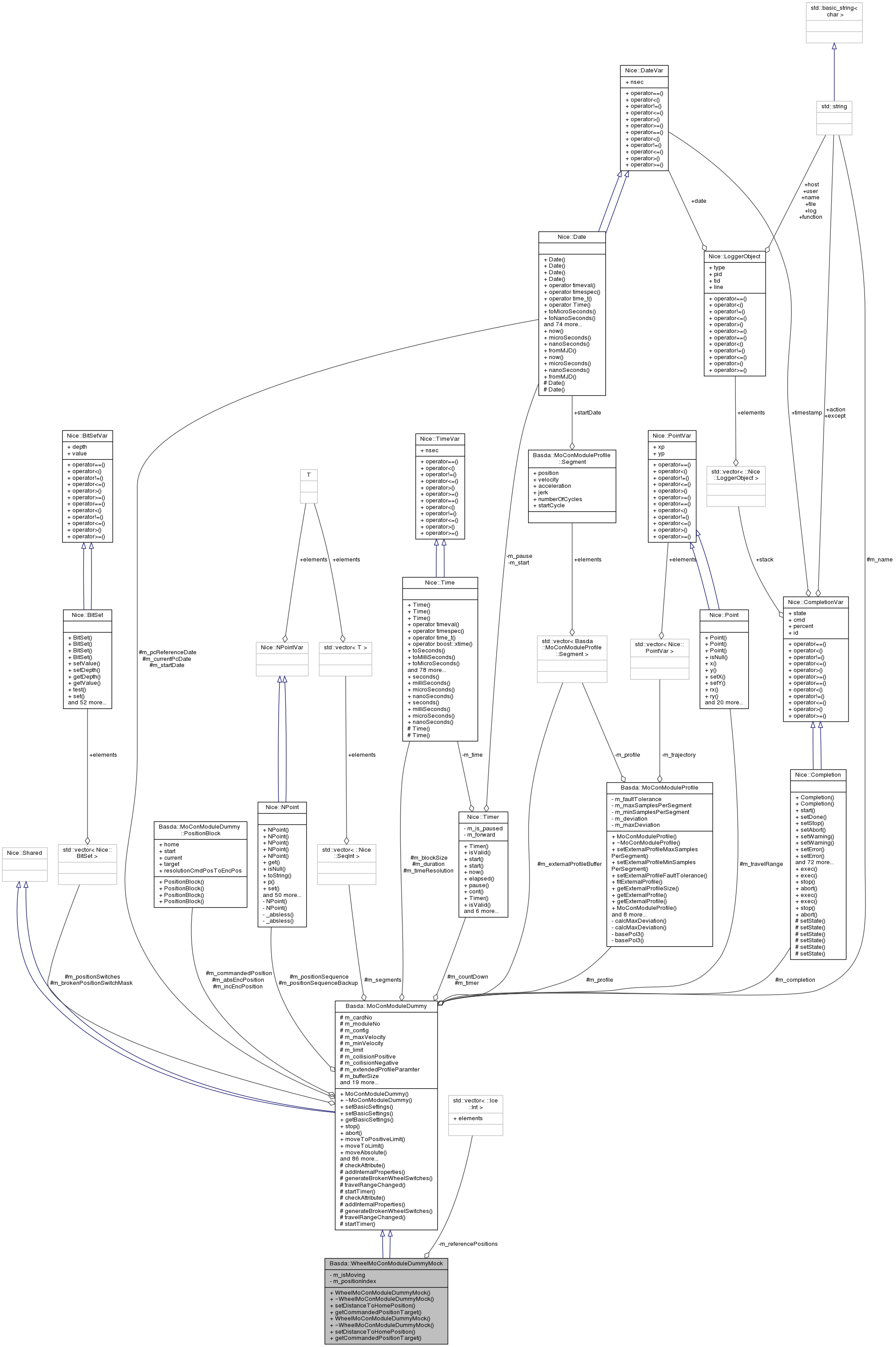
| std::string | m_name |
| |
| int | m_cardNo |
| |
| int | m_moduleNo |
| |
| Nice::JointPtr | m_config |
| |
| Nice::Completion | m_completion |
| |
| Nice::Timer | m_timer |
| |
| Nice::Timer | m_countDown |
| |
| Nice::Time | m_duration |
| |
| int | m_maxVelocity |
| |
| int | m_minVelocity |
| |
| int | m_limit |
| |
| bool | m_collisionPositive |
| |
| bool | m_collisionNegative |
| |
| PositionBlock | m_commandedPosition |
| |
| PositionBlock | m_absEncPosition |
| |
| PositionBlock | m_incEncPosition |
| |
| bool | m_extendedProfileParamter |
| | member for to define buffering mode (start from the beginning or from the last position) More...
|
| |
| unsigned int | m_bufferSize |
| | the external profile buffer size More...
|
| |
| unsigned int | m_externalProfileIndexCycle |
| | the index of the buffer cell to store the next segment More...
|
| |
| Nice::I64 | m_externalProfileStartCycle |
| | the cycle when the external profile started More...
|
| |
| Nice::I64 | m_elapsedCyclesSinceProfileStart |
| | the difference between the current cycle and the m_externalProfileStartCycle (profile elapsed cycles) More...
|
| |
| Nice::I64 | m_sumOfSegmentDuration |
| | sum of the elapsed segment duration (in cycles) since profile start More...
|
| |
| unsigned int | m_externalProfileInfo |
| | the current index of the executed external profile segment More...
|
| |
| Nice::Time | m_timeResolution |
| |
| int | m_frequency |
| |
| Basda::MoConModuleProfile | m_profile |
| | member for the extended external profile mode More...
|
| |
| Nice::NPoint | m_positionSequence |
| |
| Nice::NPoint | m_positionSequenceBackup |
| |
| Nice::Date | m_startDate |
| |
| Nice::Point | m_travelRange |
| |
| Nice::Time | m_blockSize |
| |
| Nice::Date | m_pcReferenceDate |
| |
| Nice::Date | m_currentPcDate |
| |
| Nice::I64 | m_currentMoConClocks |
| |
| double | m_cycleTime |
| |
| Nice::U16 | m_basicResolution |
| |
| Nice::U32 | m_basicAcceleration |
| |
| double | m_accelerationPerCycle |
| | The basic acceleration is set during the external profile initialization, to keep the acceleration constant over the whole trajectory. More...
|
| |
| std::vector< Basda::MoConModuleProfile::Segment > | m_externalProfileBuffer |
| |
| unsigned int | m_externalProfileBufferSize |
| |
| Nice::Monitor | m_monitor |
| |
| Nice::ChatLinePtr | m_chat |
| |
| Nice::SeqSeqInt | m_segments |
| |
| unsigned int | m_microsteps |
| |
| Nice::U32 | m_depth |
| |
| Nice::SeqBitSet | m_positionSwitches |
| |
| Nice::SeqBitSet | m_brokenPositionSwitchMask |
| |
| int | m_positionOffset |
| |
| int | m_correctedPositionDeviation |
| |
| Nice::DateDummyPtr | m_niceDateDummy |
| |
 Public Member Functions inherited from Basda::MoConModuleDummy
Public Member Functions inherited from Basda::MoConModuleDummy