#include <LaosWfcXineticsServiceWorker.h>
Inheritance diagram for Laos::XineticsServiceWorker:

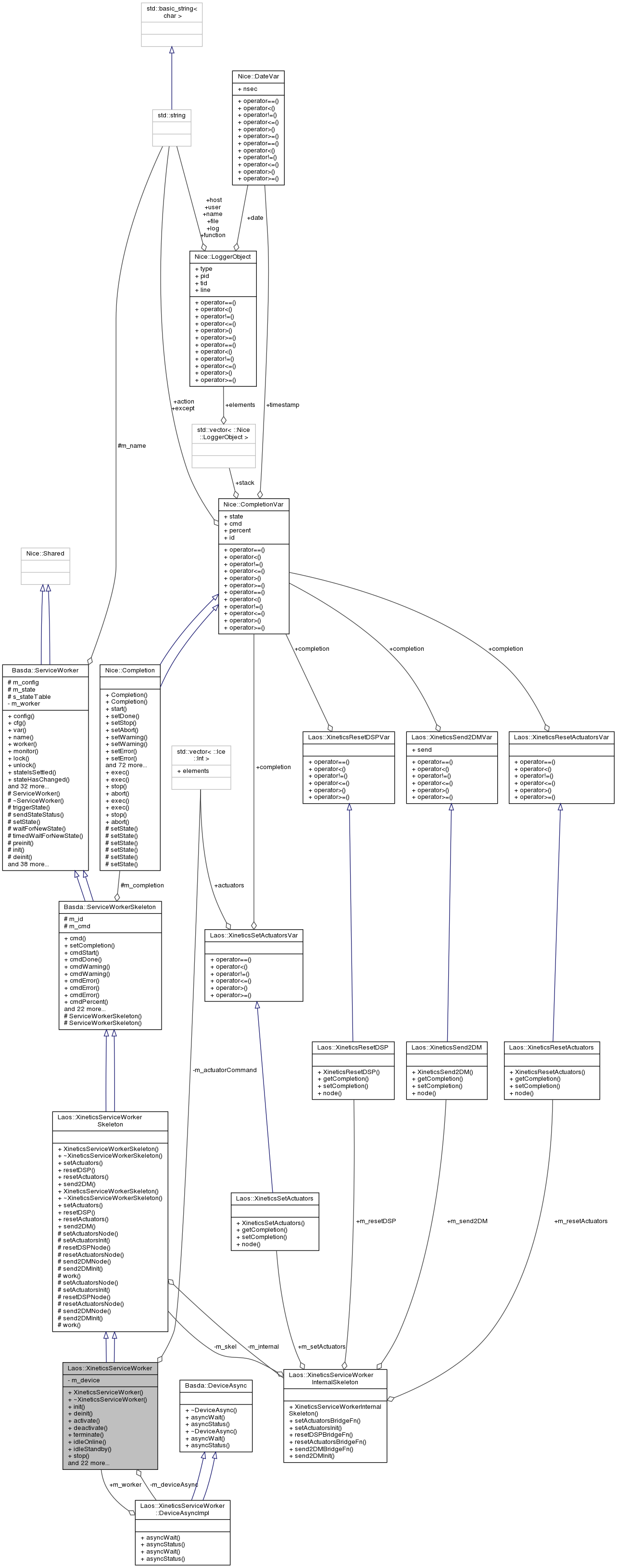
Collaboration diagram for Laos::XineticsServiceWorker:
Classes | |
| struct | DeviceAsyncImpl |
Public Member Functions | |
| XineticsServiceWorker (const Nice::JointPtr &_config) | |
| virtual | ~XineticsServiceWorker () |
| virtual void | init () |
| virtual void | deinit () |
| virtual void | activate () |
| virtual void | deactivate () |
| virtual void | terminate () |
| schedule EXIT as the next target state. More... | |
| virtual void | idleOnline () |
| wait for a state change. More... | |
| virtual void | idleStandby () |
| wait for a state change. More... | |
| virtual void | stop () |
| does nothing. More... | |
| virtual void | abort () |
| does nothing. More... | |
| virtual void | setActuators (const Nice::SeqInt &_actuatorCmd) |
| virtual void | getActuators (Nice::SeqInt &_actuatorCmd) const |
| retrieve the most recently calculated integer values. More... | |
| virtual void | resetDSP () |
| virtual void | resetActuators () |
| virtual void | send2DM (bool SEND) |
| XineticsServiceWorker (const Nice::JointPtr &_config) | |
| virtual | ~XineticsServiceWorker () |
| virtual void | init () |
| virtual void | deinit () |
| virtual void | activate () |
| virtual void | deactivate () |
| virtual void | terminate () |
| schedule EXIT as the next target state. More... | |
| virtual void | idleOnline () |
| wait for a state change. More... | |
| virtual void | idleStandby () |
| wait for a state change. More... | |
| virtual void | stop () |
| does nothing. More... | |
| virtual void | abort () |
| does nothing. More... | |
| virtual void | setActuators (const Nice::SeqInt &_actuatorCmd) |
| virtual void | getActuators (Nice::SeqInt &_actuatorCmd) const |
| virtual void | resetDSP () |
| virtual void | resetActuators () |
| virtual void | send2DM (bool SEND) |
 Public Member Functions inherited from Laos::XineticsServiceWorkerSkeleton Public Member Functions inherited from Laos::XineticsServiceWorkerSkeleton | |
| XineticsServiceWorkerSkeleton (const Nice::JointPtr &_config) | |
| virtual | ~XineticsServiceWorkerSkeleton () |
| XineticsServiceWorkerSkeleton (const Nice::JointPtr &_config) | |
| virtual | ~XineticsServiceWorkerSkeleton () |
| Public Member Functions inherited from Basda::ServiceWorkerSkeleton | |
| const Nice::PropertyPtr & | cmd () |
| void | setCompletion (const Nice::Completion &_c) |
| void | cmdStart (const std::string &_action="") |
| void | cmdDone () |
| void | cmdWarning (const std::string &_l) |
| void | cmdWarning (const Nice::LoggerObject &_o) |
| void | cmdError (const std::string &_l) |
| void | cmdError (const Nice::LoggerObject &_o) |
| void | cmdError (const Nice::SeqLoggerObject &_oo) |
| void | cmdPercent (Nice::Int _v) |
| void | cmdAction (Nice::Int _v, const std::string &_s) |
| virtual void | cmd (const Nice::Completion &_c) |
| template<typename DataType > | |
| Nice::Completion | exec (const Nice::Completion &_c, DataType &_localdata, const DataType &_indata=DataType()) |
| if currently online, push the state into WORKING More... | |
| template<typename DataType > | |
| void | execCommand (DataType _cmd) |
| const Nice::PropertyPtr & | cmd () |
| void | setCompletion (const Nice::Completion &_c) |
| void | cmdStart (const std::string &_action="") |
| void | cmdDone () |
| void | cmdWarning (const std::string &_l) |
| void | cmdWarning (const Nice::LoggerObject &_o) |
| void | cmdError (const std::string &_l) |
| void | cmdError (const Nice::LoggerObject &_o) |
| void | cmdError (const Nice::SeqLoggerObject &_oo) |
| void | cmdPercent (Nice::Int _v) |
| void | cmdAction (Nice::Int _v, const std::string &_s) |
| virtual void | cmd (const Nice::Completion &_c) |
| template<typename DataType > | |
| Nice::Completion | exec (const Nice::Completion &_c, DataType &_localdata, const DataType &_indata=DataType()) |
| template<typename DataType > | |
| void | execCommand (DataType _cmd) |
| Public Member Functions inherited from Basda::ServiceWorker | |
| const Nice::JointPtr & | config () |
| Nice::JointPtr | cfg () |
| Nice::JointPtr | var () |
| virtual const std::string & | name () |
| virtual WorkerThreadPtr | worker () |
| virtual Nice::Monitor & | monitor () |
| virtual void | lock () |
| virtual void | unlock () |
| bool | stateIsSettled () |
| bool | stateHasChanged () |
| void | changeState (Basda::ServiceState _state) |
| change state to a new state If the state is the current state, or a negative state, do nothing. Otherwise change the "next" state in the state machine and notify all threads. More... | |
| bool | tryChangeState (Basda::ServiceState _state, const Nice::Time &_timeout=Nice::Time::seconds(0.0)) |
| change state to a new state More... | |
| void | waitForState (Basda::ServiceState _state) |
| wait (indefinitely) until the worker has reached a spcifici state More... | |
| bool | timedWaitForState (Basda::ServiceState _state, const Nice::Time &_timeout) |
| wait (indefinitely) until the worker has reached a specific state More... | |
| bool | changeStateOnlyFromTo (Basda::ServiceState _from, Basda::ServiceState _to) |
| wait (indefinitely) until the worker has reached a spcifici state More... | |
| Basda::ServiceState | state () |
| Basda::ServiceState | stateNow () |
| Basda::ServiceState | stateNext () |
| Basda::ServiceState | stateLast () |
| bool | isTransit () |
| bool | isTerminated () |
| const Nice::JointPtr & | config () |
| Nice::JointPtr | cfg () |
| Nice::JointPtr | var () |
| virtual const std::string & | name () |
| virtual WorkerThreadPtr | worker () |
| virtual Nice::Monitor & | monitor () |
| virtual void | lock () |
| virtual void | unlock () |
| bool | stateIsSettled () |
| bool | stateHasChanged () |
| void | changeState (Basda::ServiceState _state) |
| bool | tryChangeState (Basda::ServiceState _state, const Nice::Time &_timeout=Nice::Time::seconds(0.0)) |
| void | waitForState (Basda::ServiceState _state) |
| bool | timedWaitForState (Basda::ServiceState _state, const Nice::Time &_timeout) |
| bool | changeStateOnlyFromTo (Basda::ServiceState _from, Basda::ServiceState _to) |
| Basda::ServiceState | state () |
| Basda::ServiceState | stateNow () |
| Basda::ServiceState | stateNext () |
| Basda::ServiceState | stateLast () |
| bool | isTransit () |
| bool | isTerminated () |
Private Attributes | |
| DeviceAsyncImpl | m_deviceAsync |
| Laos::XineticsCoreDevicePtr | m_device |
| Nice::SeqInt | m_actuatorCommand |
Additional Inherited Members | |
| Protected Types inherited from Basda::ServiceWorker | |
| typedef void(ServiceWorker::* | ServiceWorkerMemFn) () |
| typedef Branch | BranchTable[6][6] |
| typedef IceUtil::Handle< WorkerThread > | WorkerThreadPtr |
| typedef void(ServiceWorker::* | ServiceWorkerMemFn) () |
| typedef Branch | BranchTable[6][6] |
| typedef IceUtil::Handle< WorkerThread > | WorkerThreadPtr |
| Protected Member Functions inherited from Laos::XineticsServiceWorkerSkeleton | |
| const char * | setActuatorsNode () |
| void | setActuatorsInit (const Nice::SeqInt &_actuators) |
| const char * | resetDSPNode () |
| const char * | resetActuatorsNode () |
| const char * | send2DMNode () |
| void | send2DMInit (bool _send) |
| virtual void | work () |
| const char * | setActuatorsNode () |
| void | setActuatorsInit (const Nice::SeqInt &_actuators) |
| const char * | resetDSPNode () |
| const char * | resetActuatorsNode () |
| const char * | send2DMNode () |
| void | send2DMInit (bool _send) |
| virtual void | work () |
| Protected Member Functions inherited from Basda::ServiceWorkerSkeleton | |
| ServiceWorkerSkeleton (const Nice::JointPtr &_config) | |
| ServiceWorkerSkeleton (const Nice::JointPtr &_config) | |
| Protected Member Functions inherited from Basda::ServiceWorker | |
| ServiceWorker (const Nice::JointPtr &_jointPtr) | |
| ctor More... | |
| virtual | ~ServiceWorker () |
| dtor Does nothing (in this base class) More... | |
| void | triggerState (const Basda::ServiceStateMachine &_state) |
| change state to a new state More... | |
| void | sendStateStatus (const std::string &_action, int _percent) |
| void | setState (Basda::ServiceState _next) |
| virtual void | waitForNewState () |
| virtual bool | timedWaitForNewState (const Nice::Time &_timeout) |
| virtual void | preinit () |
| virtual void | packin () |
| schedule ONLINE as the next target state. More... | |
| virtual void | errorOffline () |
| set the target state to OFFLINE. More... | |
| virtual void | errorStandby () |
| set the target state to OFFLINE. More... | |
| virtual void | errorOnline () |
| set the target state to OFFLINE. More... | |
| virtual void | errorWorking () |
| set the target state to OFFLINE. More... | |
| virtual void | idleOffline () |
| wait for a state change. More... | |
| ServiceWorker (const Nice::JointPtr &_jointPtr) | |
| virtual | ~ServiceWorker () |
| void | triggerState (const Basda::ServiceStateMachine &_state) |
| void | sendStateStatus (const std::string &_action, int _percent) |
| void | setState (Basda::ServiceState _next) |
| virtual void | waitForNewState () |
| virtual bool | timedWaitForNewState (const Nice::Time &_timeout) |
| virtual void | preinit () |
| virtual void | packin () |
| virtual void | errorOffline () |
| virtual void | errorStandby () |
| virtual void | errorOnline () |
| virtual void | errorWorking () |
| virtual void | idleOffline () |
| Protected Attributes inherited from Basda::ServiceWorkerSkeleton | |
| Nice::Completion | m_completion |
| Nice::I64 | m_id |
| Nice::PropertyPtr | m_cmd |
| Protected Attributes inherited from Basda::ServiceWorker | |
| Nice::JointPtr | m_config |
| Nice::PropertyPtr | m_state |
| std::string | m_name |
| Static Protected Attributes inherited from Basda::ServiceWorker | |
| static BranchTable | s_stateTable |
| A table which tells which state should go via which intermediate state to a target state. The 6 states are SHUTDOWN, OFFLINE, STANDBY, ONLINE, WORKING and ERROR. The principles are that. More... | |
Constructor & Destructor Documentation
◆ XineticsServiceWorker() [1/2]
| Laos::XineticsServiceWorker::XineticsServiceWorker | ( | const Nice::JointPtr & | _config | ) |
◆ ~XineticsServiceWorker() [1/2]
|
virtual |
◆ XineticsServiceWorker() [2/2]
| Laos::XineticsServiceWorker::XineticsServiceWorker | ( | const Nice::JointPtr & | _config | ) |
◆ ~XineticsServiceWorker() [2/2]
|
virtual |
Member Function Documentation
◆ abort() [1/2]
|
virtual |
◆ abort() [2/2]
|
virtual |
◆ activate() [1/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ activate() [2/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ deactivate() [1/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ deactivate() [2/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ deinit() [1/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ deinit() [2/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ getActuators() [1/2]
|
virtual |
retrieve the most recently calculated integer values.
- Parameters
-
[out] _actuatorCmd The vector of the most recently calculated commands. Obtained by un-applying offsets, sensitivities and non-linearties to the most recently stored voltages. Note that the values have not necessarily been forwarded to the DM by setActuators() if some overvoltage/bias checks failed.
- Since
- 2018-11-06
◆ getActuators() [2/2]
|
virtual |
◆ idleOnline() [1/2]
|
virtual |
◆ idleOnline() [2/2]
|
virtual |
◆ idleStandby() [1/2]
|
virtual |
◆ idleStandby() [2/2]
|
virtual |
◆ init() [1/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ init() [2/2]
|
virtual |
Implements Basda::ServiceWorker.
◆ resetActuators() [1/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ resetActuators() [2/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ resetDSP() [1/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ resetDSP() [2/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ send2DM() [1/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ send2DM() [2/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ setActuators() [1/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ setActuators() [2/2]
|
virtual |
Implements Laos::XineticsServiceWorkerSkeleton.
◆ stop() [1/2]
|
virtual |
◆ stop() [2/2]
|
virtual |
◆ terminate() [1/2]
|
virtual |
◆ terminate() [2/2]
|
virtual |
Member Data Documentation
◆ m_actuatorCommand
|
private |
◆ m_device
|
private |
◆ m_deviceAsync
|
private |
The documentation for this class was generated from the following files:
- ln/laos-wfc/doc/include/LaosWfcXineticsServiceWorker.h
- ln/laos-wfc/doc/include/LaosWfcXineticsServiceWorker.cc
