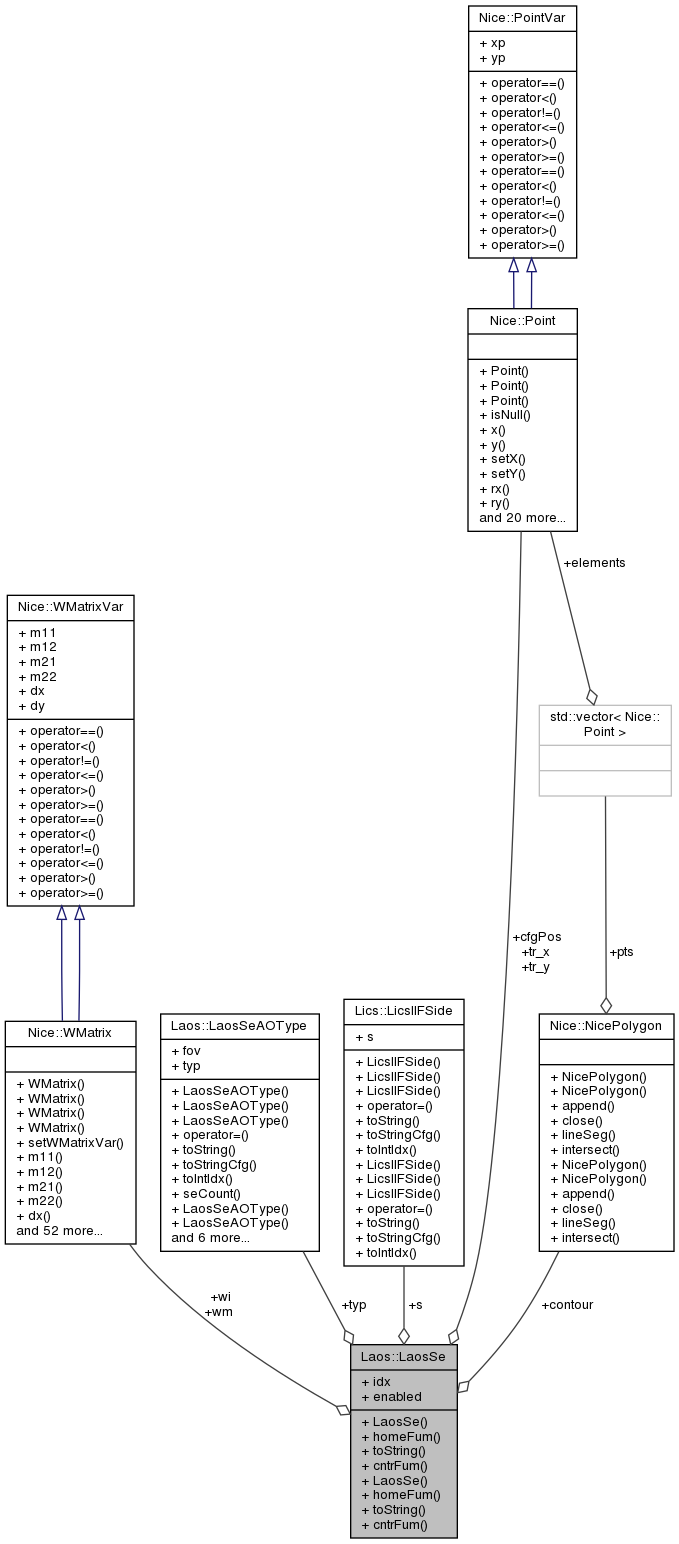
This class represents the geometry of one the 8 (or 12) SE's. More...
#include <LaosSe.h>
Public Member Functions | |
| LaosSe (const enum Lics::Sid sdx, const enum Laos::AOType ghws, short no) | |
| Nice::Point | homeFum () const |
| Construct the global coordinates of the home position (microns). More... | |
| std::string | toString () const |
| the usual SExx string. More... | |
| Nice::NicePolygon | cntrFum (const Nice::Point &pt) const |
| construct the contour of the arm. More... | |
| LaosSe (const enum Lics::Sid sdx, const enum Laos::AOType ghws, short no) | |
| Nice::Point | homeFum () const |
| std::string | toString () const |
| Nice::NicePolygon | cntrFum (const Nice::Point &pt) const |
Public Attributes | |
| Lics::LicsIIFSide | s |
| The flag that indicates sx or dx. More... | |
| Laos::LaosSeAOType | typ |
| The flag that indicates gws or hws. More... | |
| Nice::WMatrix | wm |
| The conversion matrix and offset that transfroms from the local (steps) to global F (Microns) coordinates. More... | |
| Nice::WMatrix | wi |
| The inverse of the conversion tranformation. More... | |
| Nice::Point | tr_x |
| The travel range of motor along x (steps) More... | |
| Nice::Point | tr_y |
| The travel range of the motor along y (steps) More... | |
| Nice::Point | cfgPos |
| The current position in the configuration file. More... | |
| short | idx |
| The 0-based number of the individual SE in the range 0-7 (HWS) or 0-11 (GWS) More... | |
| bool | enabled |
| The ENABLED flag of the configuration file. More... | |
| Nice::NicePolygon | contour |
| The 2D contour relevant to collision detection. More... | |
Detailed Description
This class represents the geometry of one the 8 (or 12) SE's.
It serves to describe the reachable region in the focal plane of the GWS or MHWS.
Constructor & Destructor Documentation
◆ LaosSe() [1/2]
| Laos::LaosSe::LaosSe | ( | const enum Lics::Sid | sdx, |
| const enum Laos::AOType | ghws, | ||
| short | no | ||
| ) |
Standard ctor.
- Parameters
-
sdx The flag for DX or SX. ghws The flag for HWS or GWS. no The integer in the standad 1-8 or 1-12 range.
- Since
- 2017-03-29
◆ LaosSe() [2/2]
| Laos::LaosSe::LaosSe | ( | const enum Lics::Sid | sdx, |
| const enum Laos::AOType | ghws, | ||
| short | no | ||
| ) |
Member Function Documentation
◆ cntrFum() [1/2]
| Nice::NicePolygon Laos::LaosSe::cntrFum | ( | const Nice::Point & | pt | ) | const |
construct the contour of the arm.
- Parameters
-
[in] pt The position of the head in units of steps. This is relative to the x=y=0 position in the coordinate transform.
- Returns
- The polyline in units of F coordinates (microns)
- Since
- 2017-03-30
◆ cntrFum() [2/2]
| Nice::NicePolygon Laos::LaosSe::cntrFum | ( | const Nice::Point & | pt | ) | const |
◆ homeFum() [1/2]
| Nice::Point Laos::LaosSe::homeFum | ( | ) | const |
◆ homeFum() [2/2]
| Nice::Point Laos::LaosSe::homeFum | ( | ) | const |
Construct the global coordinates of the home position (microns).
The name indicates that the point is returned in F (focal plane) in microns.
- Since
- 2017-03-30
◆ toString() [1/2]
| std::string Laos::LaosSe::toString | ( | ) | const |
the usual SExx string.
- Returns
- a string in the format SE01 up to SE12.
- Since
- 2017-03-30
◆ toString() [2/2]
| std::string Laos::LaosSe::toString | ( | ) | const |
Member Data Documentation
◆ cfgPos
| Nice::Point Laos::LaosSe::cfgPos |
The current position in the configuration file.
Useful information for collision detection if the motor is disabled.
- Since
- 2018-11-22
◆ contour
| Nice::NicePolygon Laos::LaosSe::contour |
The 2D contour relevant to collision detection.
This represents the contour in a reference position when the arm is placed at x=y=0.
◆ enabled
| bool Laos::LaosSe::enabled |
The ENABLED flag of the configuration file.
◆ idx
| short Laos::LaosSe::idx |
The 0-based number of the individual SE in the range 0-7 (HWS) or 0-11 (GWS)
◆ s
| Lics::LicsIIFSide Laos::LaosSe::s |
The flag that indicates sx or dx.
◆ tr_x
| Nice::Point Laos::LaosSe::tr_x |
The travel range of motor along x (steps)
◆ tr_y
| Nice::Point Laos::LaosSe::tr_y |
The travel range of the motor along y (steps)
◆ typ
| Laos::LaosSeAOType Laos::LaosSe::typ |
The flag that indicates gws or hws.
◆ wi
| Nice::WMatrix Laos::LaosSe::wi |
The inverse of the conversion tranformation.
◆ wm
| Nice::WMatrix Laos::LaosSe::wm |
The conversion matrix and offset that transfroms from the local (steps) to global F (Microns) coordinates.
The documentation for this class was generated from the following files:
