#include <PfeifferTurboPumpTCM1601.h>
Protected Member Functions | |
| int | sendMsg (const std::string &msg) |
| this function sends a specific command to the device More... | |
| std::string | readMsg () |
| this function reads the answer from the device More... | |
| int | sendMsg (const std::string &msg) |
| this function sends a specific command to the device More... | |
| std::string | readMsg () |
| this function reads the answer from the device More... | |
Private Member Functions | |
| void | setConnection (std::string connection) |
| this function is used to set the m_IpInfo variable to a specific string More... | |
| void | createChecksum (std::string input, int &checksum) |
| void | setConnection (std::string connection) |
| this function is used to set the m_IpInfo variable to a specific string More... | |
| void | createChecksum (std::string input, int &checksum) |
Private Attributes | |
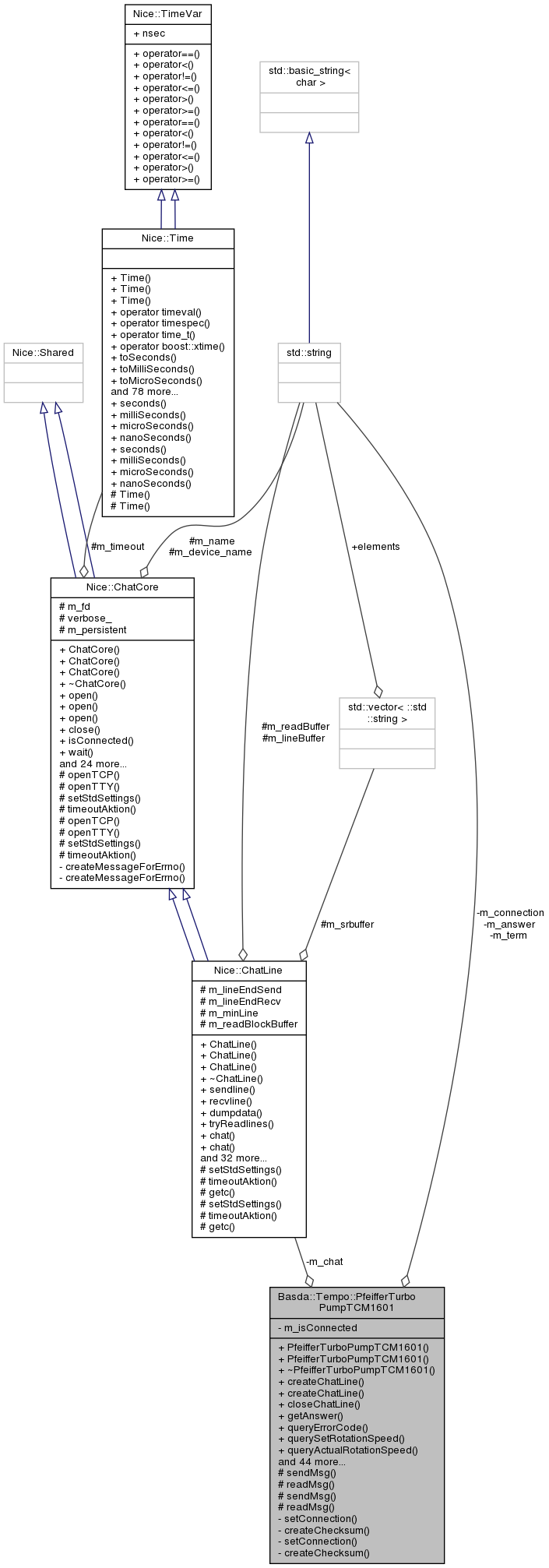
| Nice::ChatLine | m_chat |
| the member chatline used for the communication More... | |
| std::string | m_connection |
| this string contains the connection informations (ip adress, port) to build the chatLine More... | |
| bool | m_isConnected |
| this boolean indicates if there is an active connection to a device More... | |
| std::string | m_answer |
| this string contains the latest answer from the device More... | |
| std::string | m_term |
| this string contains the current terminators for the sending of the commands More... | |
Constructor & Destructor Documentation
◆ PfeifferTurboPumpTCM1601() [1/4]
| Basda::Tempo::PfeifferTurboPumpTCM1601::PfeifferTurboPumpTCM1601 | ( | ) |
◆ PfeifferTurboPumpTCM1601() [2/4]
| Basda::Tempo::PfeifferTurboPumpTCM1601::PfeifferTurboPumpTCM1601 | ( | std::string | connection, |
| bool | create | ||
| ) |
◆ ~PfeifferTurboPumpTCM1601() [1/2]
|
virtual |
◆ PfeifferTurboPumpTCM1601() [3/4]
| Basda::Tempo::PfeifferTurboPumpTCM1601::PfeifferTurboPumpTCM1601 | ( | ) |
◆ PfeifferTurboPumpTCM1601() [4/4]
| Basda::Tempo::PfeifferTurboPumpTCM1601::PfeifferTurboPumpTCM1601 | ( | std::string | connection, |
| bool | create | ||
| ) |
◆ ~PfeifferTurboPumpTCM1601() [2/2]
|
virtual |
Member Function Documentation
◆ closeChatLine() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::closeChatLine | ( | ) |
function to close the chat line connection to the device
◆ closeChatLine() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::closeChatLine | ( | ) |
function to close the chat line connection to the device
◆ createChatLine() [1/4]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::createChatLine | ( | const std::string & | connection | ) |
◆ createChatLine() [2/4]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::createChatLine | ( | const std::string & | connection | ) |
◆ createChatLine() [3/4]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::createChatLine | ( | ) |
◆ createChatLine() [4/4]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::createChatLine | ( | ) |
◆ createChecksum() [1/2]
|
private |
◆ createChecksum() [2/2]
|
private |
◆ getAnswer() [1/2]
|
inline |
◆ getAnswer() [2/2]
|
inline |
◆ queryActualRotationSpeed() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryActualRotationSpeed | ( | int & | rotation | ) |
◆ queryActualRotationSpeed() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryActualRotationSpeed | ( | int & | rotation | ) |
◆ queryDriverVersion() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryDriverVersion | ( | std::string & | version | ) |
◆ queryDriverVersion() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryDriverVersion | ( | std::string & | version | ) |
◆ queryErrorCode() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryErrorCode | ( | std::string & | errorcode | ) |
◆ queryErrorCode() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryErrorCode | ( | std::string & | errorcode | ) |
◆ queryFinalSpeed() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryFinalSpeed | ( | int & | hertz | ) |
◆ queryFinalSpeed() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryFinalSpeed | ( | int & | hertz | ) |
◆ queryMotorAmpere() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryMotorAmpere | ( | double & | ampere | ) |
◆ queryMotorAmpere() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryMotorAmpere | ( | double & | ampere | ) |
◆ queryMotorPower() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryMotorPower | ( | int & | watt | ) |
◆ queryMotorPower() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryMotorPower | ( | int & | watt | ) |
◆ queryMotorVoltage() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryMotorVoltage | ( | double & | volt | ) |
◆ queryMotorVoltage() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryMotorVoltage | ( | double & | volt | ) |
◆ queryOperationHours() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryOperationHours | ( | int & | hours | ) |
◆ queryOperationHours() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::queryOperationHours | ( | int & | hours | ) |
◆ querysetBrakeStatus() [1/2]
◆ querysetBrakeStatus() [2/2]
◆ querysetGasOperationMode() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetGasOperationMode | ( | bool | set, |
| unsigned short int & | mode | ||
| ) |
◆ querysetGasOperationMode() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetGasOperationMode | ( | bool | set, |
| unsigned short int & | mode | ||
| ) |
◆ querysetMaxRUTime() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetMaxRUTime | ( | bool | set, |
| int & | minutes | ||
| ) |
◆ querysetMaxRUTime() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetMaxRUTime | ( | bool | set, |
| int & | minutes | ||
| ) |
◆ querysetMotorPumpStatus() [1/2]
◆ querysetMotorPumpStatus() [2/2]
◆ querysetOperationMode() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetOperationMode | ( | bool | set, |
| unsigned short int & | mode | ||
| ) |
◆ querysetOperationMode() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetOperationMode | ( | bool | set, |
| unsigned short int & | mode | ||
| ) |
◆ querysetPumpingStationStatus() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetPumpingStationStatus | ( | bool | set, |
| bool & | status | ||
| ) |
◆ querysetPumpingStationStatus() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetPumpingStationStatus | ( | bool | set, |
| bool & | status | ||
| ) |
◆ querySetRotationSpeed() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querySetRotationSpeed | ( | int & | rotation | ) |
◆ querySetRotationSpeed() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querySetRotationSpeed | ( | int & | rotation | ) |
◆ querysetRotationSpeedSetPoint() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetRotationSpeedSetPoint | ( | bool | set, |
| double & | setpoint | ||
| ) |
◆ querysetRotationSpeedSetPoint() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetRotationSpeedSetPoint | ( | bool | set, |
| double & | setpoint | ||
| ) |
◆ querysetRUTimeControlStatus() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetRUTimeControlStatus | ( | bool | set, |
| bool & | status | ||
| ) |
◆ querysetRUTimeControlStatus() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetRUTimeControlStatus | ( | bool | set, |
| bool & | status | ||
| ) |
◆ querysetStandbyRotationSpeed() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetStandbyRotationSpeed | ( | bool | set, |
| double & | speed | ||
| ) |
◆ querysetStandbyRotationSpeed() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetStandbyRotationSpeed | ( | bool | set, |
| double & | speed | ||
| ) |
◆ querysetStandbyStatus() [1/2]
◆ querysetStandbyStatus() [2/2]
◆ querysetSwitchPoint() [1/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetSwitchPoint | ( | bool | set, |
| int & | percentage | ||
| ) |
◆ querysetSwitchPoint() [2/2]
| void Basda::Tempo::PfeifferTurboPumpTCM1601::querysetSwitchPoint | ( | bool | set, |
| int & | percentage | ||
| ) |
◆ readMsg() [1/2]
|
protected |
this function reads the answer from the device
- Parameters
-
rcv answer from the device
◆ readMsg() [2/2]
|
protected |
this function reads the answer from the device
- Parameters
-
rcv answer from the device
◆ sendMsg() [1/2]
|
protected |
this function sends a specific command to the device
- Parameters
-
msg message to send
- Returns
- number of chars sent
◆ sendMsg() [2/2]
|
protected |
this function sends a specific command to the device
- Parameters
-
msg message to send
- Returns
- number of chars sent
◆ setConnection() [1/2]
|
private |
this function is used to set the m_IpInfo variable to a specific string
◆ setConnection() [2/2]
|
private |
this function is used to set the m_IpInfo variable to a specific string
Member Data Documentation
◆ m_answer
|
private |
this string contains the latest answer from the device
◆ m_chat
|
private |
the member chatline used for the communication
◆ m_connection
|
private |
this string contains the connection informations (ip adress, port) to build the chatLine
◆ m_isConnected
|
private |
this boolean indicates if there is an active connection to a device
◆ m_term
|
private |
this string contains the current terminators for the sending of the commands
The documentation for this class was generated from the following files:
- TwiceAsNice/basda-tempo/doc/include/PfeifferTurboPumpTCM1601.h
- TwiceAsNice/basda-tempo/doc/include/PfeifferTurboPumpTCM1601.cpp
