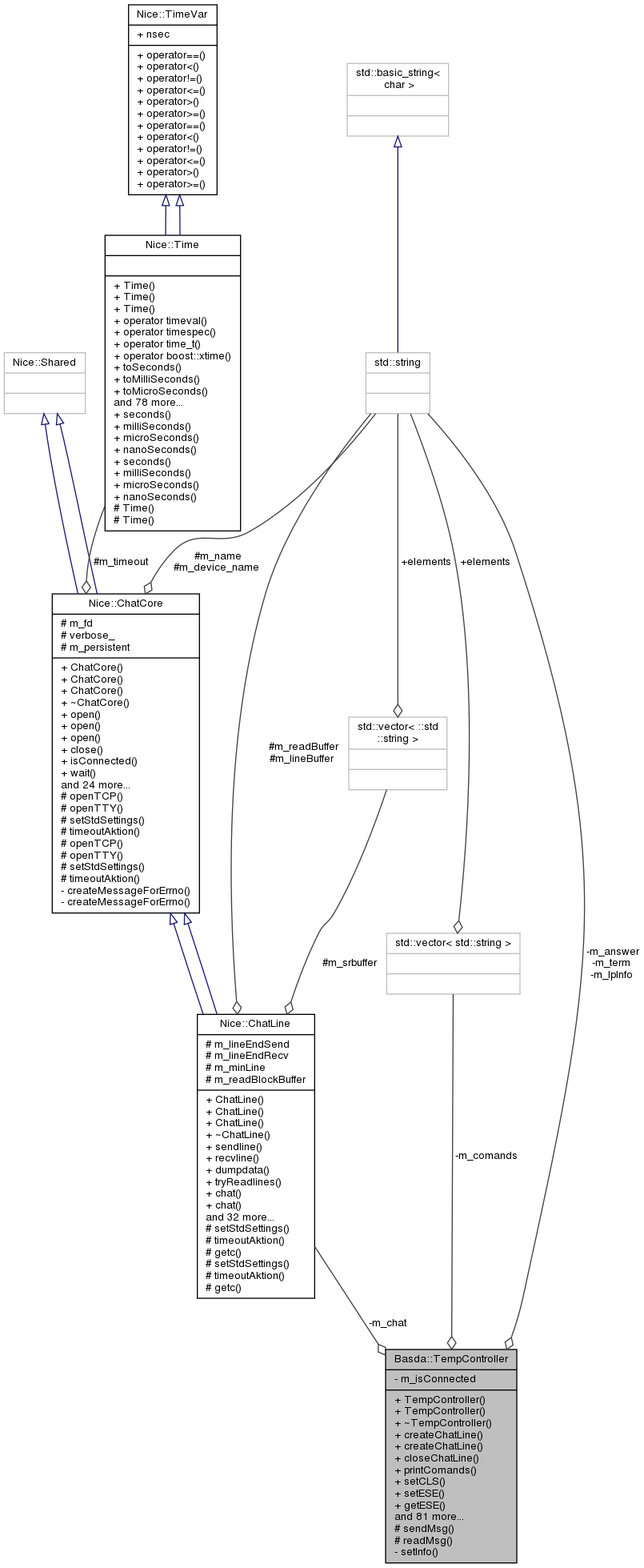
The class TempController provides all functions to create a connection to the temperature monitor and send and receave specific comands. More...
#include <LSTempController.h>
Public Member Functions | |
| TempController () | |
| standard constructor for this class. More... | |
| TempController (std::string dev, bool create) | |
| constructor to set the device adress and create connection on demand More... | |
| virtual | ~TempController () |
| standard destructor ( slightly modified to close the port also ) More... | |
| void | createChatLine (const std::string &conConfig) |
| this function creates the chatline and starts the connection to the Lakeshore Temperature Monitor. More... | |
| void | createChatLine (void) |
| creates the chatline with m_IpInfo More... | |
| void | closeChatLine (void) |
| this function closes the chatline and ends the connection to the Device More... | |
| void | printComands (void) |
| this function returns a list of all possible comands supportet by the temperature monitor. More... | |
| void | setCLS (void) |
| command to clear the interface of the device More... | |
| void | setESE (int _weight) |
| sets the configure status reports in the standard event register More... | |
| void | getESE (void) |
| gets the configuration of status reports in the event status register More... | |
| void | getESR (void) |
| gets the standard event status register More... | |
| void | getIDN (void) |
| gets the identification of the device More... | |
| void | setOPC (void) |
| sets operation complete command More... | |
| void | getOPC (void) |
| query operation complete. More... | |
| void | setRST (void) |
| reset the instrument More... | |
| void | setSRE (int _weight) |
| set the status reports in the service request enable register More... | |
| void | getSRE (void) |
| query the configuration of status reports in the service request enable register More... | |
| void | getSTB (void) |
| query the status byte More... | |
| void | getTST (void) |
| enable selftest of the device More... | |
| void | setALARM (char _input, bool _alarm, int _source, double _high, double _low, double _dead, bool _latch) |
| sets the alarm parameters More... | |
| void | getALARM (char _input) |
| query the input alarm parameters More... | |
| void | getALARMST (char _input) |
| query the input alarm status More... | |
| void | setALMRST (void) |
| clear alarm status for all inputs More... | |
| void | setANALOG (bool _bipolar, int _mode, int _input, int _source, double _high, double _low, double _manual) |
| configure analog output parameters More... | |
| void | getANALOG (void) |
| query analog output parameters More... | |
| void | getAOUT (void) |
| query analog output data More... | |
| void | setBAUD (int _baud) |
| sets the serial interface baudrate More... | |
| void | getBAUD (void) |
| gets the current serial interface baudrate More... | |
| void | setBEEP (bool _beep) |
| sets the Alarm Beeper More... | |
| void | getBEEP (void) |
| get the alarm beeper status More... | |
| void | setBRIGT (int _bright) |
| sets the display brightness More... | |
| void | getBRIGT (void) |
| gets the display brightness More... | |
| void | setCMODE (int _loop, int _mode) |
| set the control loop mode More... | |
| void | getCMODE (int _loop) |
| get the control loop mode More... | |
| void | getCRDG (char _input) |
| get the celsius reading from an input More... | |
| void | setCRVDEL (int _curve) |
| delete a user specified curve More... | |
| void | setCRVHDR (int _curve, std::string _name, std::string _sn, int _format, double _limit, int _coeff) |
| configure the curve header More... | |
| void | getCRVHDR (int _curve) |
| query curve header More... | |
| void | setCRVPT (int _curve, int _index, double _units, double _temp) |
| configure curve data point More... | |
| void | getCRVPT (int _curve, int _index) |
| query curve data point More... | |
| void | setCSET (int _loop, char _input, int _units, bool _pwrup, int _curpwr) |
| configure the control loop parameter More... | |
| void | getCSET (int _loop) |
| get control loop paramters More... | |
| void | setDFLT (void) |
| set to factory defaults More... | |
| void | setDISPFLD (int _loc, int _item, int _source) |
| configure display parameters More... | |
| void | getDISPFLD (int _loc) |
| query display field More... | |
| void | setEMUL (bool _emul) |
| sets 330 emulation mode on or off More... | |
| void | getEMUL (void) |
| checks whether 330 emulation mode is active or not More... | |
| void | setFILTER (char _input, bool _filter, int _points, int _win) |
| configure input filter paramters More... | |
| void | getFILTER (char _filter) |
| query input filter parameters More... | |
| void | getHTR (void) |
| heater output query More... | |
| void | getHTRST (void) |
| heater status query More... | |
| void | setIEEE (int _term, bool _eoi, int _adr) |
| configure IEEE-488 interface parameters More... | |
| void | getIEEE (void) |
| query the IEEE-488 interface parameters More... | |
| void | setINCRV (char _input, int _curve) |
| configure curve input number More... | |
| void | getINCRV (char _input) |
| query input curve number More... | |
| void | setINTYPE (char _input, int _type, bool _comp) |
| set input type parameter More... | |
| void | getINTYPE (char _input) |
| query the input type paramters More... | |
| void | getKEYST (void) |
| query keypad status More... | |
| void | getKRDG (char _input) |
| query Kelvin reading for an input More... | |
| void | getLDAT (char _input) |
| query linear input equation data More... | |
| void | setLINEAR (char _input, int _equ, double _varM, int _srcX, int _srcB, double _varB) |
| set the input linear equation parameter More... | |
| void | getLINEAR (char _input) |
| get the linear equation parameter More... | |
| void | setLOCK (bool _lock, int _code) |
| configure Lock-out and Lock-out code More... | |
| void | getLOCK (void) |
| query lock-out and lock-out code More... | |
| void | getMDAT (char _input) |
| query the minimum/maximum data More... | |
| void | setMNMX (char _input, int _source) |
| configure minimun and maximum input function parameters More... | |
| void | getMNMX (char _input) |
| query minimun and maximum input function parameters More... | |
| void | setMNMXRST (void) |
| reset all min/max function for all inputs More... | |
| void | setMODE (int _mode) |
| configure remote interface mode More... | |
| void | getMODE (void) |
| query remote interface mode More... | |
| void | setMOUT (int _loop, double _value) |
| set the control loop manual heater power (MHP) output More... | |
| void | getMOUT (int _loop) |
| get the control loop manual heater power (MHP) output More... | |
| void | setPID (int _loop, double _valP, double _valI, int _valD) |
| set the control loop PID values More... | |
| void | getPID (int _loop) |
| get the control loop PID values More... | |
| void | setRAMP (int _loop, bool _ramp, double _rate) |
| set the control setpoint ramp parameter More... | |
| void | getRAMP (int _loop) |
| get the control setpoint ramp parameter More... | |
| void | getRAMPST (int _loop) |
| get control setpoint ramp status More... | |
| void | getRDGST (char _input) |
| get input reading status More... | |
| void | setRELAY (int _relay, int _mode, char _input, int _type) |
| configure relay control parameters More... | |
| void | getRELAY (int _relay) |
| query relay control parameters More... | |
| void | getRELAYST (int _type) |
| query relay status More... | |
| void | getREV (void) |
| get input firmware revision More... | |
| void | setSCAL (int _std, int _dest, std::string _sn, double _t1, double _u1, double _t2, double _u2, double _t3, double _u3) |
| generate a SoftCal(TM) curve More... | |
| void | setSETP (int _loop, double _val) |
| set control setpoint More... | |
| void | getSETP (int _loop) |
| get control setpoint More... | |
| void | getSRDG (char _input) |
| get the sensor unit input reading More... | |
| void | getTEMP (void) |
| get the thermocouple junction temperature More... | |
| void | getTUNEST (void) |
| get control tuning status More... | |
| void | setZONE (int _loop, int _zone, double _top, double _valP, double _valI, int _valD, int _mout, int _range) |
| set the control loop zone table parameter More... | |
| void | getZONE (int _loop, int _zone) |
| get control loop zone parameter More... | |
| std::string | getAnswer (void) |
| returns the answer string More... | |
Protected Member Functions | |
| int | sendMsg (const std::string &cmd) |
| this function sends a specific comand to the device More... | |
| void | readMsg (std::string &rcv) |
| this function reads the answer from the device More... | |
Private Member Functions | |
| void | setInfo (std::string info) |
| this function is used to set the m_IpInfo variable to a specific string More... | |
Private Attributes | |
| std::vector< std::string > | m_comands |
| this vector contains the comands supported by the temperature monitor More... | |
| Nice::ChatLine | m_chat |
| this is the chatline that is used to comunicate with the device More... | |
| std::string | m_IpInfo |
| this string contains the connection informations (ip adress, port) to build the chatLine More... | |
| bool | m_isConnected |
| this boolean indicates if there is an active connection to a device More... | |
| std::string | m_answer |
| this string contains the latest answer from the device More... | |
| std::string | m_term |
| this string contains the current terminators for the sending of the commands More... | |
Detailed Description
The class TempController provides all functions to create a connection to the temperature monitor and send and receave specific comands.
Comunication and conection is done by Chatline().
Constructor & Destructor Documentation
◆ TempController() [1/2]
| TempController::TempController | ( | ) |
standard constructor for this class.
It creates the command list.
◆ TempController() [2/2]
| TempController::TempController | ( | std::string | dev, |
| bool | create | ||
| ) |
constructor to set the device adress and create connection on demand
- Parameters
-
dev adress of the device create true if a connection should be created at once
◆ ~TempController()
|
virtual |
standard destructor ( slightly modified to close the port also )
Member Function Documentation
◆ closeChatLine()
| void TempController::closeChatLine | ( | void | ) |
this function closes the chatline and ends the connection to the Device
◆ createChatLine() [1/2]
| void TempController::createChatLine | ( | const std::string & | conConfig | ) |
this function creates the chatline and starts the connection to the Lakeshore Temperature Monitor.
- Parameters
-
conConfig configuration and identification needed by chatline
◆ createChatLine() [2/2]
| void TempController::createChatLine | ( | void | ) |
creates the chatline with m_IpInfo
◆ getALARM()
| void TempController::getALARM | ( | char | _input | ) |
query the input alarm parameters
- Parameters
-
_input specifies the input (A or B)
◆ getALARMST()
| void TempController::getALARMST | ( | char | _input | ) |
query the input alarm status
- Parameters
-
_input specifies the input (A or B)
◆ getANALOG()
| void TempController::getANALOG | ( | void | ) |
query analog output parameters
- Parameters
-
_output specifies the output
◆ getAnswer()
|
inline |
returns the answer string
- Returns
- latest answer from the device
◆ getAOUT()
| void TempController::getAOUT | ( | void | ) |
query analog output data
◆ getBAUD()
| void TempController::getBAUD | ( | void | ) |
gets the current serial interface baudrate
◆ getBEEP()
| void TempController::getBEEP | ( | void | ) |
get the alarm beeper status
◆ getBRIGT()
| void TempController::getBRIGT | ( | void | ) |
gets the display brightness
◆ getCMODE()
| void TempController::getCMODE | ( | int | _loop | ) |
get the control loop mode
- Parameters
-
_loop specifies which loop to query (1 or 2)
◆ getCRDG()
| void TempController::getCRDG | ( | char | _input | ) |
get the celsius reading from an input
- Parameters
-
_input specifies the input (A or B)
◆ getCRVHDR()
| void TempController::getCRVHDR | ( | int | _curve | ) |
query curve header
- Parameters
-
_curve specifies which curve to query (1-41)
◆ getCRVPT()
| void TempController::getCRVPT | ( | int | _curve, |
| int | _index | ||
| ) |
query curve data point
- Parameters
-
_curve specifies which curve to query (1-41) _index specifies the points index in the curve (1-200)
◆ getCSET()
| void TempController::getCSET | ( | int | _loop | ) |
get control loop paramters
- Parameters
-
_loop specifies loop (1 or 2)
◆ getDISPFLD()
| void TempController::getDISPFLD | ( | int | _loc | ) |
query display field
- Parameters
-
_loc display field (1-4)
◆ getEMUL()
| void TempController::getEMUL | ( | void | ) |
checks whether 330 emulation mode is active or not
◆ getESE()
| void TempController::getESE | ( | void | ) |
gets the configuration of status reports in the event status register
◆ getESR()
| void TempController::getESR | ( | void | ) |
gets the standard event status register
◆ getFILTER()
| void TempController::getFILTER | ( | char | _filter | ) |
query input filter parameters
- Parameters
-
_input specifies input (A or B)
◆ getHTR()
| void TempController::getHTR | ( | void | ) |
heater output query
◆ getHTRST()
| void TempController::getHTRST | ( | void | ) |
heater status query
◆ getIDN()
| void TempController::getIDN | ( | void | ) |
gets the identification of the device
◆ getIEEE()
| void TempController::getIEEE | ( | void | ) |
query the IEEE-488 interface parameters
◆ getINCRV()
| void TempController::getINCRV | ( | char | _input | ) |
query input curve number
- Parameters
-
_input specifies the input (A or B)
◆ getINTYPE()
| void TempController::getINTYPE | ( | char | _input | ) |
query the input type paramters
- Parameters
-
_input specifies the input (A or B)
◆ getKEYST()
| void TempController::getKEYST | ( | void | ) |
query keypad status
◆ getKRDG()
| void TempController::getKRDG | ( | char | _input | ) |
query Kelvin reading for an input
- Parameters
-
_input specifies the input (A or B)
◆ getLDAT()
| void TempController::getLDAT | ( | char | _input | ) |
query linear input equation data
- Parameters
-
_input specifies input (A or B)
◆ getLINEAR()
| void TempController::getLINEAR | ( | char | _input | ) |
get the linear equation parameter
- Parameters
-
_input specifies input (A or B)
◆ getLOCK()
| void TempController::getLOCK | ( | void | ) |
query lock-out and lock-out code
◆ getMDAT()
| void TempController::getMDAT | ( | char | _input | ) |
query the minimum/maximum data
- Parameters
-
_input specifies input (A or B)
◆ getMNMX()
| void TempController::getMNMX | ( | char | _input | ) |
query minimun and maximum input function parameters
- Parameters
-
_input specifies the input (A or B)
◆ getMODE()
| void TempController::getMODE | ( | void | ) |
query remote interface mode
◆ getMOUT()
| void TempController::getMOUT | ( | int | _loop | ) |
get the control loop manual heater power (MHP) output
- Parameters
-
_loop specifies loop to query (1 or 2)
◆ getOPC()
| void TempController::getOPC | ( | void | ) |
query operation complete.
- Note
- places a 1 in the controllers outoput queue upon completion of all pending selected device operations
◆ getPID()
| void TempController::getPID | ( | int | _loop | ) |
get the control loop PID values
- Parameters
-
_loop specifies the loop (1 or 2)
◆ getRAMP()
| void TempController::getRAMP | ( | int | _loop | ) |
get the control setpoint ramp parameter
- Parameters
-
_loop specifies the loop (1 or 2)
◆ getRAMPST()
| void TempController::getRAMPST | ( | int | _loop | ) |
get control setpoint ramp status
- Parameters
-
_loop specifies the loop (1 or 2)
◆ getRDGST()
| void TempController::getRDGST | ( | char | _input | ) |
get input reading status
- Parameters
-
_input specifies input (A or B)
◆ getRELAY()
| void TempController::getRELAY | ( | int | _relay | ) |
query relay control parameters
- Parameters
-
_relay specifies which relay to query (1 or 2)
◆ getRELAYST()
| void TempController::getRELAYST | ( | int | _type | ) |
query relay status
- Parameters
-
_type specifies relay type to query (0=low alarm, 1=high alarm)
◆ getREV()
| void TempController::getREV | ( | void | ) |
get input firmware revision
◆ getSETP()
| void TempController::getSETP | ( | int | _loop | ) |
get control setpoint
- Parameters
-
_loop specifies the loop (1 or 2)
◆ getSRDG()
| void TempController::getSRDG | ( | char | _input | ) |
get the sensor unit input reading
- Parameters
-
_input specifies the input (A or B)
◆ getSRE()
| void TempController::getSRE | ( | void | ) |
query the configuration of status reports in the service request enable register
◆ getSTB()
| void TempController::getSTB | ( | void | ) |
query the status byte
◆ getTEMP()
| void Basda::TempController::getTEMP | ( | void | ) |
get the thermocouple junction temperature
◆ getTST()
| void TempController::getTST | ( | void | ) |
enable selftest of the device
- Note
- the answer of the device is "0" when no errors has been found and "1" else
◆ getTUNEST()
| void Basda::TempController::getTUNEST | ( | void | ) |
get control tuning status
◆ getZONE()
| void TempController::getZONE | ( | int | _loop, |
| int | _zone | ||
| ) |
get control loop zone parameter
- Parameters
-
_loop specifies the loop (1 or 2) _zone specifies the zone (1-10)
◆ printComands()
| void TempController::printComands | ( | void | ) |
this function returns a list of all possible comands supportet by the temperature monitor.
- Returns
- string with the comands
◆ readMsg()
|
protected |
this function reads the answer from the device
- Parameters
-
rcv answer from the device
◆ sendMsg()
|
protected |
this function sends a specific comand to the device
- Parameters
-
cmd comand to send
- Returns
- number of chars sent
◆ setALARM()
| void TempController::setALARM | ( | char | _input, |
| bool | _alarm, | ||
| int | _source, | ||
| double | _high, | ||
| double | _low, | ||
| double | _dead, | ||
| bool | _latch | ||
| ) |
sets the alarm parameters
- Parameters
-
_input specifies the input to configure (A or B) _alarm sets the alarm for the input to off or on _source specifies input data to check (1=Kelvin, 2=Celsius, 3=sensor units, 4=linear data) _high value the source is checked against to activate high alarm level _low value the source is checked against to activate low alarm level _dead the value that the source must change outside of an alarm condition to deactivate an unlatched alarm _latch Specifies a latched alarm (remains active after alarm condition correction)
◆ setALMRST()
| void TempController::setALMRST | ( | void | ) |
clear alarm status for all inputs
◆ setANALOG()
| void TempController::setANALOG | ( | bool | _bipolar, |
| int | _mode, | ||
| int | _input, | ||
| int | _source, | ||
| double | _high, | ||
| double | _low, | ||
| double | _manual | ||
| ) |
configure analog output parameters
- Parameters
-
_bipolar specifies analog output (0=positiv only, 1=bipolar) _mode data for the analog output to monitor (0=off, 1=input, 2=manual) _input specifies the input to monitor if _mode=1 _source specifies input data (1=Kelvin, 2=Celsius, 3=sensor units, 4=linear equation) _high If _mode=1, this parameter represents the data at which the analog output reaches +100% output _low If _mode=1, this parameter represents the data at which the analog output reaches -100% output if bipolar or 0% else _manual if _mode=2, this parameter is the output of the analog output
◆ setBAUD()
| void TempController::setBAUD | ( | int | _baud | ) |
sets the serial interface baudrate
- Parameters
-
_baud specifies baud rate (0=300, 1=1200, 2=9600)
◆ setBEEP()
| void TempController::setBEEP | ( | bool | _beep | ) |
sets the Alarm Beeper
- Parameters
-
_beep true=on, false =off
◆ setBRIGT()
| void TempController::setBRIGT | ( | int | _bright | ) |
sets the display brightness
- Parameters
-
_bright specifies the brightness (0=25%, 1=50%, 2=75%, 3=100%)
◆ setCLS()
| void TempController::setCLS | ( | void | ) |
command to clear the interface of the device
◆ setCMODE()
| void TempController::setCMODE | ( | int | _loop, |
| int | _mode | ||
| ) |
set the control loop mode
- Parameters
-
_loop specifies which loop to configure (1 or 2) _mode specifies the mode (1=manual PID, 2=zone, 3=open loop, 4=autotune PID, 5=autotune PI, 6=autotune P)
◆ setCRVDEL()
| void TempController::setCRVDEL | ( | int | _curve | ) |
delete a user specified curve
- Parameters
-
_curve specifies the curve to delete (21-41)
◆ setCRVHDR()
| void TempController::setCRVHDR | ( | int | _curve, |
| std::string | _name, | ||
| std::string | _sn, | ||
| int | _format, | ||
| double | _limit, | ||
| int | _coeff | ||
| ) |
configure the curve header
- Parameters
-
_curve specifies which curve to configure (21-41) _name specifies curve name (max 15 chars) _sn serial number for the curve (max 10 chars) _format curve data format (1=mV/K, 2=V/K, 3=Ohm/K, 4=log(Ohm/K) _limit curve temperature limit in Kelvin _coeff temperature coefficient (1=negative, 2=positive)
◆ setCRVPT()
| void TempController::setCRVPT | ( | int | _curve, |
| int | _index, | ||
| double | _units, | ||
| double | _temp | ||
| ) |
configure curve data point
- Parameters
-
_curve specifies which curve to configure (21-41) _index specifies which point index in the curve (1-200) _units specifies sensor units for this point to 6 digits _temp specifies corresponding temperature in Kelvin for this point to 6 digits
◆ setCSET()
| void TempController::setCSET | ( | int | _loop, |
| char | _input, | ||
| int | _units, | ||
| bool | _pwrup, | ||
| int | _curpwr | ||
| ) |
configure the control loop parameter
- Parameters
-
_loop specifies which loop to configure (1 or 2) _input specifies which input to control from (A or B) _units specifies setpoint units (1=Kelvin, 2=Celsius, 3=sensor units) _pwrup enables(true)/disables(false) control loop on power-up _curpwr specifies whether the heater output displays in current(1) or power(2)
◆ setDFLT()
| void TempController::setDFLT | ( | void | ) |
set to factory defaults
- Note
- use with causion
◆ setDISPFLD()
| void TempController::setDISPFLD | ( | int | _loc, |
| int | _item, | ||
| int | _source | ||
| ) |
configure display parameters
- Parameters
-
_loc display location (1-4) _item specifies item to display in the field (0=off, 1=input A, 2=input B, 3=setpoint, 4=heater output) _source specifies input data to display (1=Kelvin, 2=Celsius, 3=sensor units, 4=linear data, 5=minimum data, 6=maximum data)
◆ setEMUL()
| void TempController::setEMUL | ( | bool | _emul | ) |
sets 330 emulation mode on or off
- Parameters
-
_emul true=on, false=off
◆ setESE()
| void TempController::setESE | ( | int | _weight | ) |
sets the configure status reports in the standard event register
- Parameters
-
_weight bit weighting
◆ setFILTER()
| void TempController::setFILTER | ( | char | _input, |
| bool | _filter, | ||
| int | _points, | ||
| int | _win | ||
| ) |
configure input filter paramters
- Parameters
-
_input specifies input to configure (A or B) _filter sets filter to off(false) or on(true) _points amount of data points for the filtering function (2-64) _win Specifies what percent of full scale reading limits the filtering function (1-10). Reading changes greater than this percentage reset the filter
◆ setIEEE()
| void TempController::setIEEE | ( | int | _term, |
| bool | _eoi, | ||
| int | _adr | ||
| ) |
configure IEEE-488 interface parameters
- Parameters
-
_term specifies the terminator (0=<CR><LF>, 1=<LF><CR>, 2=<LF>, 3=no terminator) _eoi disables(flase)/enables(true) the EOI mode _adr specifies the IEEE address (1-30)
◆ setINCRV()
| void TempController::setINCRV | ( | char | _input, |
| int | _curve | ||
| ) |
configure curve input number
- Parameters
-
_input specifies which input to configure (A or B) _curve specifies which curve the input uses (0=none, 1-20=std curves, 21-41=user curves)
◆ setInfo()
|
private |
this function is used to set the m_IpInfo variable to a specific string
◆ setINTYPE()
| void TempController::setINTYPE | ( | char | _input, |
| int | _type, | ||
| bool | _comp | ||
| ) |
set input type parameter
- Parameters
-
_input specifies the input (A or B) _type specifies the input sensor type (0=Silicon Diode, 1=GaAlAs Diode, 2=100 Ω Platinum/250, 3=100 Ω Platinum/500, 4=1000 Ω Platinum, 5=NTC RTD, 6=Thermocouple 25 mV, 7=Thermocouple 50 mV, 3=100 Ω Platinum/500, 8=[2.5 V, 1 mA], 9=[7.5 V, 1 mA]) _comp specifies whether input compensation is on(true) or off(false). (Reversal for thermal EMF compensation if input is resistive, room compensation if input is thermocouple. Always off if input is a diode)
◆ setLINEAR()
| void TempController::setLINEAR | ( | char | _input, |
| int | _equ, | ||
| double | _varM, | ||
| int | _srcX, | ||
| int | _srcB, | ||
| double | _varB | ||
| ) |
set the input linear equation parameter
- Parameters
-
_input specifies input (A or B) _equ specifies the linear equation to use (1=(y = mx + b), 2=(y = m(x + b))) _varM specifies a value for m in the equation _srcX specifies input data (1=Kelvin, 2=Celsius, 3=sensor units) _srcB specifies what use for b in the equation (to use a setpoint, set to same value as _srcX) (1=a value, 2=+SP1, 3=-SP1, 4=+SP2, 5=-SP2) _varB specifies value for b in the equation if _srcB=1
◆ setLOCK()
| void TempController::setLOCK | ( | bool | _lock, |
| int | _code | ||
| ) |
configure Lock-out and Lock-out code
- Parameters
-
_lock disables(false)/enables(true) the keypad lock-out _code specifies lock-out code (000-999)
◆ setMNMX()
| void TempController::setMNMX | ( | char | _input, |
| int | _source | ||
| ) |
configure minimun and maximum input function parameters
- Parameters
-
_input specifies input to configure (A or B) _source specifies input data to process through max/min (1=Kelvin, 2=Celsius, 3=sensor units, 4=linear data)
◆ setMNMXRST()
| void TempController::setMNMXRST | ( | void | ) |
reset all min/max function for all inputs
◆ setMODE()
| void TempController::setMODE | ( | int | _mode | ) |
configure remote interface mode
- Parameters
-
_mode specifies the operation mode (0=local, 1=remote, 2=remote with local lock-out)
◆ setMOUT()
| void TempController::setMOUT | ( | int | _loop, |
| double | _value | ||
| ) |
set the control loop manual heater power (MHP) output
- Parameters
-
_loop specifies loop to configure (1 or 2) _value specifies value for manual output (in percent)
◆ setOPC()
| void TempController::setOPC | ( | void | ) |
sets operation complete command
◆ setPID()
| void TempController::setPID | ( | int | _loop, |
| double | _valP, | ||
| double | _valI, | ||
| int | _valD | ||
| ) |
set the control loop PID values
- Parameters
-
_loop specifies the loop (1 or 2) _valP specifies the value for proportional (gain) (0.1-1000) _valI specifies the value for integral (reset) (0.1-1000) _valD specifies the value for derivative (rate) (0-200)
◆ setRAMP()
| void TempController::setRAMP | ( | int | _loop, |
| bool | _ramp, | ||
| double | _rate | ||
| ) |
set the control setpoint ramp parameter
- Parameters
-
_loop specifies teh oop (1 or 2) _ramp specifies whether ramping is off(false) or on(true) _rate specifies setpoint ramp rate in Kelvin per minute from 0.1 to 100
◆ setRELAY()
| void TempController::setRELAY | ( | int | _relay, |
| int | _mode, | ||
| char | _input, | ||
| int | _type | ||
| ) |
configure relay control parameters
- Parameters
-
_relay specifies which relay to configure (1 or 2) _mode specifies relay mode (0=off, 1=on, 2=alarms) _input specifies which input alarm activates the relay when in alarm mode (A or B) _type specifies the alarm type (0=low alarm, 1=high alarm, 2=both alarms)
◆ setRST()
| void TempController::setRST | ( | void | ) |
reset the instrument
◆ setSCAL()
| void TempController::setSCAL | ( | int | _std, |
| int | _dest, | ||
| std::string | _sn, | ||
| double | _t1, | ||
| double | _u1, | ||
| double | _t2, | ||
| double | _u2, | ||
| double | _t3, | ||
| double | _u3 | ||
| ) |
generate a SoftCal(TM) curve
- Parameters
-
_std specifies the standard curve to generate SoftCal from (1,6,7) _dest specifies the user curve to store the SoftCal curve (21-28) _sn specifies the curve serial number (max 10 chars) _t1 specifies the first temperature point _u1 specifies the first sensor units point _t2 specifies the second temperature point _u2 specifies the second sensor units point _t3 specifies the third temperature point _u3 specifies the third sensor units point
◆ setSETP()
| void TempController::setSETP | ( | int | _loop, |
| double | _val | ||
| ) |
set control setpoint
- Parameters
-
_loop specifies the loop (1 or 2) _val specifies the value for the setpoint
◆ setSRE()
| void TempController::setSRE | ( | int | _weight | ) |
set the status reports in the service request enable register
- Parameters
-
_weight bit weighting
◆ setZONE()
| void TempController::setZONE | ( | int | _loop, |
| int | _zone, | ||
| double | _top, | ||
| double | _valP, | ||
| double | _valI, | ||
| int | _valD, | ||
| int | _mout, | ||
| int | _range | ||
| ) |
set the control loop zone table parameter
- Parameters
-
_loop specifies the loop (1 or 2) _zone specifies the zone in the table (1-10) _top specifies the top temperature of this zone _valP specifies P for this zone (0.1-1000) _valI specifies I for this zone (0.1-1000) _valD specifies D for this zone (0-200) _mout specifies the manual output for this zone (0-100) _range specifies the heater range for this zone if _loop=1 (0-3)
Member Data Documentation
◆ m_answer
|
private |
this string contains the latest answer from the device
◆ m_chat
|
private |
this is the chatline that is used to comunicate with the device
◆ m_comands
|
private |
this vector contains the comands supported by the temperature monitor
◆ m_IpInfo
|
private |
this string contains the connection informations (ip adress, port) to build the chatLine
◆ m_isConnected
|
private |
this boolean indicates if there is an active connection to a device
◆ m_term
|
private |
this string contains the current terminators for the sending of the commands
The documentation for this class was generated from the following files:
- TwiceAsNice/basda-tempo/src/Device/Lakeshore/LSTempController.h
- TwiceAsNice/basda-tempo/src/Device/Lakeshore/LSTempController.cc
