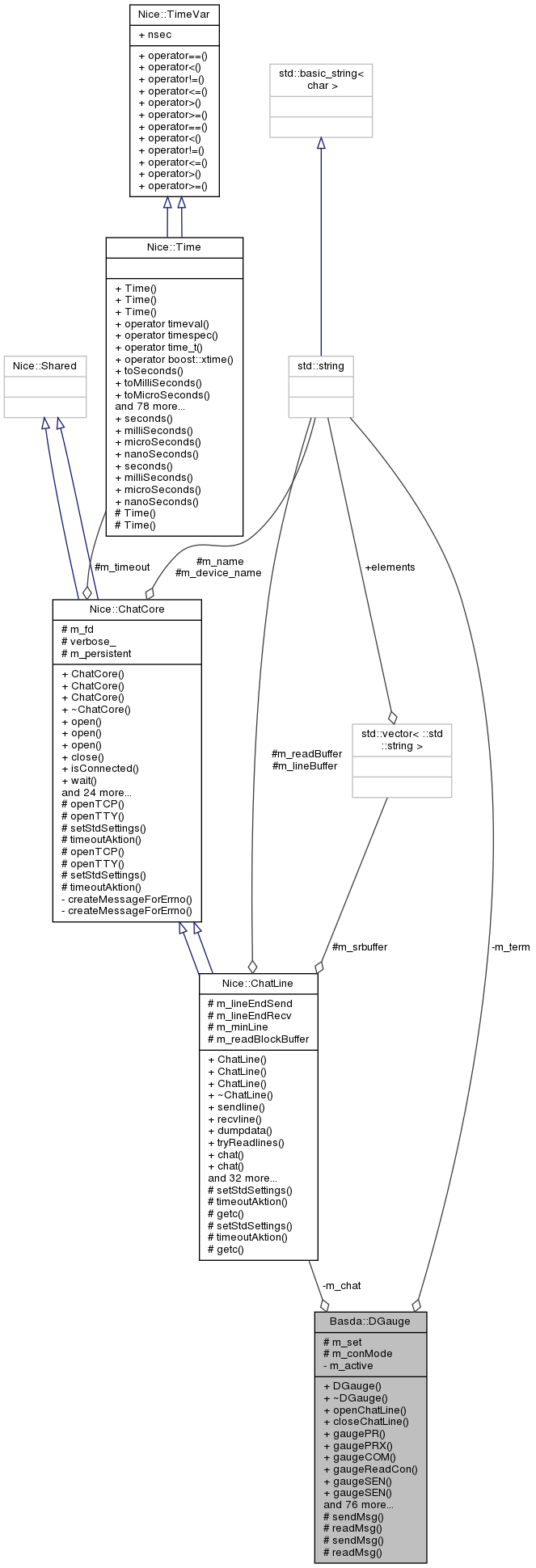
The class DGauge provides all functions needed to create a connection to the Pfeiffer Vacuum DualGauge. More...
#include <PfeifferDGauge.h>
Public Member Functions | |
| DGauge () | |
| constructor More... | |
| virtual | ~DGauge () |
| virtual destructor More... | |
| void | openChatLine (const std::string &_address) |
| function to open a chatline with the device to enable communication More... | |
| void | closeChatLine (void) |
| function to close the chatline and end the connection to the device More... | |
| void | gaugePR (int _input, int &_status, double &_value) |
| function to get a single reading of one input More... | |
| void | gaugePRX (int &_stat1, int &_stat2, double &_val1, double &_val2) |
| function to get a single reading of both inputs More... | |
| void | gaugeCOM (int _mode) |
| function to start the continuous mode for the DGauge More... | |
| StringVector | gaugeReadCon (void) |
| function that reads out the values of the two inputs in a continous mode. More... | |
| void | gaugeSEN (int _set1, int _set2, int &_mode1, int &_mode2) |
| function to enable or disable the sensors and read the changes More... | |
| void | gaugeSEN (int &_mode1, int &_mode2) |
| function to get current mode set More... | |
| void | gaugeTID (std::string &_type1, std::string &_type2) |
| function to identify the sensor types More... | |
| void | gaugeSCT (int &_display) |
| function for the display channel More... | |
| void | gaugeERR (std::string &_code) |
| function to get the error status More... | |
| void | gaugeRES (bool _erase, std::string &_error) |
| function to reset the readings and erase queued errors More... | |
| void | gaugeRES (std::string &_error) |
| function to reset the readings More... | |
| void | gaugeSP (int _func, int &_channel, double &_low, double &_high) |
| function for the threshold parameters and the switching function More... | |
| void | gaugeSPS (structSPS &_status) |
| function to get the status of a switching function More... | |
| void | gaugeFIL (int &_time1, int &_time2) |
| function for the filter time constant More... | |
| void | gaugeCAL (double &_fact1, double &_fact2) |
| function for the calibration factor More... | |
| void | gaugeFSR (int &_head1, int &_head2) |
| function for the measurement window for linear sensors More... | |
| void | gaugeOFC (int &_head1, int &_head2) |
| function for offset correction status for linear sensors More... | |
| void | gaugeOFD (double &_head1, double &_head2) |
| function for the current offset for linear sensors More... | |
| void | gaugePUC (int &_head1, int &_head2) |
| function for the status of the penning underange controll More... | |
| void | gaugeDGS (int &_head1, int &_head2) |
| function for the degas status More... | |
| void | gaugeSC (int _head, int &_sourceOn, int &_sourceOff, double &_valOn, double &_valOff) |
| function for the sensor controll More... | |
| void | gaugeUNI (int &_unit) |
| function for the unit More... | |
| void | gaugeBAUD (int &_baud) |
| function for the baud rate More... | |
| void | gaugeDCD (int &_digits) |
| function for the display controll digits More... | |
| void | gaugeSAV (int _save) |
| function to store to teh EEPROM More... | |
| void | gaugeDIC (int &_type) |
| function for the display control More... | |
| void | gaugePNR (std::string &_version) |
| get firmware version More... | |
| void | gaugeWDT (int &_dog) |
| watchdog More... | |
| void | gaugeTLC (int &_status) |
| torrlock More... | |
| void | gaugeLOC (int &_status) |
| parameter setup lock More... | |
| void | gaugeRAM (std::string &_error) |
| RAM test. More... | |
| void | gaugeEPR (std::string &_error, std::string &_check) |
| EPROM test. More... | |
| void | gaugeEEP (std::string &_error) |
| EEPROM test. More... | |
| void | gaugeDIS (int &_status) |
| display test More... | |
| void | gaugeADC (structADC &_status) |
| ADC test. More... | |
| void | gaugeIOT (int &_status, std::string &_relay) |
| IO test. More... | |
| void | gaugeTKB (structTKB &_pressed) |
| keyboard test More... | |
| void | gaugeRST (void) |
| RS232 test. More... | |
| void | enableSet (bool _enable) |
| function to enable/disable set mode More... | |
| DGauge () | |
| constructor More... | |
| virtual | ~DGauge () |
| virtual destructor More... | |
| void | openChatLine (const std::string &_address) |
| function to open a chatline with the device to enable communication More... | |
| void | closeChatLine (void) |
| function to close the chatline and end the connection to the device More... | |
| void | gaugePR (int _input, int &_status, double &_value) |
| function to get a single reading of one input More... | |
| void | gaugePRX (int &_stat1, int &_stat2, double &_val1, double &_val2) |
| function to get a single reading of both inputs More... | |
| void | gaugeCOM (int _mode) |
| function to start the continuous mode for the DGauge More... | |
| StringVector | gaugeReadCon (void) |
| function that reads out the values of the two inputs in a continous mode. More... | |
| void | gaugeSEN (int _set1, int _set2, int &_mode1, int &_mode2) |
| function to enable or disable the sensors and read the changes More... | |
| void | gaugeSEN (int &_mode1, int &_mode2) |
| function to get current mode set More... | |
| void | gaugeTID (std::string &_type1, std::string &_type2) |
| function to identify the sensor types More... | |
| void | gaugeSCT (int &_display) |
| function for the display channel More... | |
| void | gaugeERR (std::string &_code) |
| function to get the error status More... | |
| void | gaugeRES (bool _erase, std::string &_error) |
| function to reset the readings and erase queued errors More... | |
| void | gaugeRES (std::string &_error) |
| function to reset the readings More... | |
| void | gaugeSP (int _func, int &_channel, double &_low, double &_high) |
| function for the threshold parameters and the switching function More... | |
| void | gaugeSPS (structSPS &_status) |
| function to get the status of a switching function More... | |
| void | gaugeFIL (int &_time1, int &_time2) |
| function for the filter time constant More... | |
| void | gaugeCAL (double &_fact1, double &_fact2) |
| function for the calibration factor More... | |
| void | gaugeFSR (int &_head1, int &_head2) |
| function for the measurement window for linear sensors More... | |
| void | gaugeOFC (int &_head1, int &_head2) |
| function for offset correction status for linear sensors More... | |
| void | gaugeOFD (double &_head1, double &_head2) |
| function for the current offset for linear sensors More... | |
| void | gaugePUC (int &_head1, int &_head2) |
| function for the status of the penning underange controll More... | |
| void | gaugeDGS (int &_head1, int &_head2) |
| function for the degas status More... | |
| void | gaugeSC (int _head, int &_sourceOn, int &_sourceOff, double &_valOn, double &_valOff) |
| function for the sensor controll More... | |
| void | gaugeUNI (int &_unit) |
| function for the unit More... | |
| void | gaugeBAUD (int &_baud) |
| function for the baud rate More... | |
| void | gaugeDCD (int &_digits) |
| function for the display controll digits More... | |
| void | gaugeSAV (int _save) |
| function to store to teh EEPROM More... | |
| void | gaugeDIC (int &_type) |
| function for the display control More... | |
| void | gaugePNR (std::string &_version) |
| get firmware version More... | |
| void | gaugeWDT (int &_dog) |
| watchdog More... | |
| void | gaugeTLC (int &_status) |
| torrlock More... | |
| void | gaugeLOC (int &_status) |
| parameter setup lock More... | |
| void | gaugeRAM (std::string &_error) |
| RAM test. More... | |
| void | gaugeEPR (std::string &_error, std::string &_check) |
| EPROM test. More... | |
| void | gaugeEEP (std::string &_error) |
| EEPROM test. More... | |
| void | gaugeDIS (int &_status) |
| display test More... | |
| void | gaugeADC (structADC &_status) |
| ADC test. More... | |
| void | gaugeIOT (int &_status, std::string &_relay) |
| IO test. More... | |
| void | gaugeTKB (structTKB &_pressed) |
| keyboard test More... | |
| void | gaugeRST (void) |
| RS232 test. More... | |
| void | enableSet (bool _enable) |
| function to enable/disable set mode More... | |
Protected Member Functions | |
| int | sendMsg (const std::string &_cmd) |
| function to send a command to the device connected More... | |
| void | readMsg (std::string &_rcv) |
| function to read the answer from the device More... | |
| int | sendMsg (const std::string &_cmd) |
| function to send a command to the device connected More... | |
| void | readMsg (std::string &_rcv) |
| function to read the answer from the device More... | |
Protected Attributes | |
| bool | m_set |
| boolean to indicate wheather setting or getting of the functions should be used More... | |
| int | m_conMode |
| current continous mode set to the device More... | |
Private Attributes | |
| Nice::ChatLine | m_chat |
| the member chatline used for the communication More... | |
| bool | m_active |
| boolean to indicate an active connection More... | |
| std::string | m_term |
| string containing the terminators for the sent and receaved messages More... | |
Detailed Description
The class DGauge provides all functions needed to create a connection to the Pfeiffer Vacuum DualGauge.
Also it contains all methods to send and receave commands and answers. The communication is done by the Chatline.
Constructor & Destructor Documentation
◆ DGauge() [1/2]
| Basda::DGauge::DGauge | ( | ) |
constructor
◆ ~DGauge() [1/2]
|
virtual |
virtual destructor
◆ DGauge() [2/2]
| Basda::DGauge::DGauge | ( | ) |
constructor
◆ ~DGauge() [2/2]
|
virtual |
virtual destructor
Member Function Documentation
◆ closeChatLine() [1/2]
| void Basda::DGauge::closeChatLine | ( | void | ) |
function to close the chatline and end the connection to the device
◆ closeChatLine() [2/2]
| void Basda::DGauge::closeChatLine | ( | void | ) |
function to close the chatline and end the connection to the device
◆ enableSet() [1/2]
| void Basda::DGauge::enableSet | ( | bool | _enable | ) |
function to enable/disable set mode
- Parameters
-
_enable enable=true, disable=false
◆ enableSet() [2/2]
| void Basda::DGauge::enableSet | ( | bool | _enable | ) |
function to enable/disable set mode
- Parameters
-
_enable enable=true, disable=false
◆ gaugeADC() [1/2]
| void Basda::DGauge::gaugeADC | ( | structADC & | _status | ) |
ADC test.
- Parameters
-
_status status struct of the ADC channels
◆ gaugeADC() [2/2]
| void Basda::DGauge::gaugeADC | ( | structADC & | _status | ) |
ADC test.
- Parameters
-
_status status struct of the ADC channels
◆ gaugeBAUD() [1/2]
| void Basda::DGauge::gaugeBAUD | ( | int & | _baud | ) |
function for the baud rate
- Parameters
-
_baud the rate used
◆ gaugeBAUD() [2/2]
| void Basda::DGauge::gaugeBAUD | ( | int & | _baud | ) |
function for the baud rate
- Parameters
-
_baud the rate used
◆ gaugeCAL() [1/2]
| void Basda::DGauge::gaugeCAL | ( | double & | _fact1, |
| double & | _fact2 | ||
| ) |
function for the calibration factor
- Parameters
-
_fact1 factor for sensor 1 (log. 0.100-9.990, lin. 0.500-2.000) _fact2 factor for sensor 2 (log. 0.100-9.990, lin. 0.500-2.000)
◆ gaugeCAL() [2/2]
| void Basda::DGauge::gaugeCAL | ( | double & | _fact1, |
| double & | _fact2 | ||
| ) |
function for the calibration factor
- Parameters
-
_fact1 factor for sensor 1 (log. 0.100-9.990, lin. 0.500-2.000) _fact2 factor for sensor 2 (log. 0.100-9.990, lin. 0.500-2.000)
◆ gaugeCOM() [1/2]
| void Basda::DGauge::gaugeCOM | ( | int | _mode | ) |
function to start the continuous mode for the DGauge
- Parameters
-
_mode time mode for the readings
◆ gaugeCOM() [2/2]
| void Basda::DGauge::gaugeCOM | ( | int | _mode | ) |
function to start the continuous mode for the DGauge
- Parameters
-
_mode time mode for the readings
◆ gaugeDCD() [1/2]
| void Basda::DGauge::gaugeDCD | ( | int & | _digits | ) |
function for the display controll digits
- Parameters
-
_digits number of digits
◆ gaugeDCD() [2/2]
| void Basda::DGauge::gaugeDCD | ( | int & | _digits | ) |
function for the display controll digits
- Parameters
-
_digits number of digits
◆ gaugeDGS() [1/2]
| void Basda::DGauge::gaugeDGS | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for the degas status
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugeDGS() [2/2]
| void Basda::DGauge::gaugeDGS | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for the degas status
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugeDIC() [1/2]
| void Basda::DGauge::gaugeDIC | ( | int & | _type | ) |
function for the display control
- Parameters
-
_type type of display control (0=manual, 1=auto)
◆ gaugeDIC() [2/2]
| void Basda::DGauge::gaugeDIC | ( | int & | _type | ) |
function for the display control
- Parameters
-
_type type of display control (0=manual, 1=auto)
◆ gaugeDIS() [1/2]
| void Basda::DGauge::gaugeDIS | ( | int & | _status | ) |
display test
- Parameters
-
_status test status
◆ gaugeDIS() [2/2]
| void Basda::DGauge::gaugeDIS | ( | int & | _status | ) |
display test
- Parameters
-
_status test status
◆ gaugeEEP() [1/2]
| void Basda::DGauge::gaugeEEP | ( | std::string & | _error | ) |
EEPROM test.
- Parameters
-
_error error code
◆ gaugeEEP() [2/2]
| void Basda::DGauge::gaugeEEP | ( | std::string & | _error | ) |
EEPROM test.
- Parameters
-
_error error code
◆ gaugeEPR() [1/2]
| void Basda::DGauge::gaugeEPR | ( | std::string & | _error, |
| std::string & | _check | ||
| ) |
EPROM test.
- Parameters
-
_error error code _check check sum (hex)
◆ gaugeEPR() [2/2]
| void Basda::DGauge::gaugeEPR | ( | std::string & | _error, |
| std::string & | _check | ||
| ) |
EPROM test.
- Parameters
-
_error error code _check check sum (hex)
◆ gaugeERR() [1/2]
| void Basda::DGauge::gaugeERR | ( | std::string & | _code | ) |
function to get the error status
- Parameters
-
_code the error code
◆ gaugeERR() [2/2]
| void Basda::DGauge::gaugeERR | ( | std::string & | _code | ) |
function to get the error status
- Parameters
-
_code the error code
◆ gaugeFIL() [1/2]
| void Basda::DGauge::gaugeFIL | ( | int & | _time1, |
| int & | _time2 | ||
| ) |
function for the filter time constant
- Parameters
-
_time1 time constant of the filter of sensor 1 _time2 time constant of the filter of sensor 2
◆ gaugeFIL() [2/2]
| void Basda::DGauge::gaugeFIL | ( | int & | _time1, |
| int & | _time2 | ||
| ) |
function for the filter time constant
- Parameters
-
_time1 time constant of the filter of sensor 1 _time2 time constant of the filter of sensor 2
◆ gaugeFSR() [1/2]
| void Basda::DGauge::gaugeFSR | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for the measurement window for linear sensors
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugeFSR() [2/2]
| void Basda::DGauge::gaugeFSR | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for the measurement window for linear sensors
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugeIOT() [1/2]
| void Basda::DGauge::gaugeIOT | ( | int & | _status, |
| std::string & | _relay | ||
| ) |
IO test.
- Parameters
-
_status status of the test _relay status relays to test (in hex format)
◆ gaugeIOT() [2/2]
| void Basda::DGauge::gaugeIOT | ( | int & | _status, |
| std::string & | _relay | ||
| ) |
IO test.
- Parameters
-
_status status of the test _relay status relays to test (in hex format)
◆ gaugeLOC() [1/2]
| void Basda::DGauge::gaugeLOC | ( | int & | _status | ) |
parameter setup lock
- Parameters
-
_status status of the lock
◆ gaugeLOC() [2/2]
| void Basda::DGauge::gaugeLOC | ( | int & | _status | ) |
parameter setup lock
- Parameters
-
_status status of the lock
◆ gaugeOFC() [1/2]
| void Basda::DGauge::gaugeOFC | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for offset correction status for linear sensors
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugeOFC() [2/2]
| void Basda::DGauge::gaugeOFC | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for offset correction status for linear sensors
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugeOFD() [1/2]
| void Basda::DGauge::gaugeOFD | ( | double & | _head1, |
| double & | _head2 | ||
| ) |
function for the current offset for linear sensors
- Parameters
-
_head1 offset for sensor 1 _head2 offset for sensor 2
◆ gaugeOFD() [2/2]
| void Basda::DGauge::gaugeOFD | ( | double & | _head1, |
| double & | _head2 | ||
| ) |
function for the current offset for linear sensors
- Parameters
-
_head1 offset for sensor 1 _head2 offset for sensor 2
◆ gaugePNR() [1/2]
| void Basda::DGauge::gaugePNR | ( | std::string & | _version | ) |
get firmware version
- Parameters
-
_version firmware number
◆ gaugePNR() [2/2]
| void Basda::DGauge::gaugePNR | ( | std::string & | _version | ) |
get firmware version
- Parameters
-
_version firmware number
◆ gaugePR() [1/2]
| void Basda::DGauge::gaugePR | ( | int | _input, |
| int & | _status, | ||
| double & | _value | ||
| ) |
function to get a single reading of one input
- Parameters
-
_input specifies the input _status status of the reading _value the value of the reading
◆ gaugePR() [2/2]
| void Basda::DGauge::gaugePR | ( | int | _input, |
| int & | _status, | ||
| double & | _value | ||
| ) |
function to get a single reading of one input
- Parameters
-
_input specifies the input _status status of the reading _value the value of the reading
◆ gaugePRX() [1/2]
| void Basda::DGauge::gaugePRX | ( | int & | _stat1, |
| int & | _stat2, | ||
| double & | _val1, | ||
| double & | _val2 | ||
| ) |
function to get a single reading of both inputs
- Parameters
-
_stat1 status of the first reading _stat2 status of the second reading _val1 value of sensor 1 _val2 value of sensor 2
◆ gaugePRX() [2/2]
| void Basda::DGauge::gaugePRX | ( | int & | _stat1, |
| int & | _stat2, | ||
| double & | _val1, | ||
| double & | _val2 | ||
| ) |
function to get a single reading of both inputs
- Parameters
-
_stat1 status of the first reading _stat2 status of the second reading _val1 value of sensor 1 _val2 value of sensor 2
◆ gaugePUC() [1/2]
| void Basda::DGauge::gaugePUC | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for the status of the penning underange controll
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugePUC() [2/2]
| void Basda::DGauge::gaugePUC | ( | int & | _head1, |
| int & | _head2 | ||
| ) |
function for the status of the penning underange controll
- Parameters
-
_head1 setting for sensor 1 _head2 setting for sensor 2
◆ gaugeRAM() [1/2]
| void Basda::DGauge::gaugeRAM | ( | std::string & | _error | ) |
RAM test.
- Parameters
-
_error error code
◆ gaugeRAM() [2/2]
| void Basda::DGauge::gaugeRAM | ( | std::string & | _error | ) |
RAM test.
- Parameters
-
_error error code
◆ gaugeReadCon() [1/2]
| StringVector Basda::DGauge::gaugeReadCon | ( | void | ) |
function that reads out the values of the two inputs in a continous mode.
The function has to be stopped manually by pressing the "escape" key.
- Returns
- the reading of the two sensors.
- Note
- the param will be altered with every new reading
◆ gaugeReadCon() [2/2]
| StringVector Basda::DGauge::gaugeReadCon | ( | void | ) |
function that reads out the values of the two inputs in a continous mode.
The function has to be stopped manually by pressing the "escape" key.
- Returns
- the reading of the two sensors.
- Note
- the param will be altered with every new reading
◆ gaugeRES() [1/4]
| void Basda::DGauge::gaugeRES | ( | bool | _erase, |
| std::string & | _error | ||
| ) |
function to reset the readings and erase queued errors
- Parameters
-
_erase specifies whether errors should be erased _error string with queued errors
◆ gaugeRES() [2/4]
| void Basda::DGauge::gaugeRES | ( | bool | _erase, |
| std::string & | _error | ||
| ) |
function to reset the readings and erase queued errors
- Parameters
-
_erase specifies whether errors should be erased _error string with queued errors
◆ gaugeRES() [3/4]
| void Basda::DGauge::gaugeRES | ( | std::string & | _error | ) |
function to reset the readings
- Parameters
-
_error string with queued errors
◆ gaugeRES() [4/4]
| void Basda::DGauge::gaugeRES | ( | std::string & | _error | ) |
function to reset the readings
- Parameters
-
_error string with queued errors
◆ gaugeRST() [1/2]
| void Basda::DGauge::gaugeRST | ( | void | ) |
RS232 test.
- Note
- repeats every character sent. Cancel with <CTRL>C
◆ gaugeRST() [2/2]
| void Basda::DGauge::gaugeRST | ( | void | ) |
RS232 test.
- Note
- repeats every character sent. Cancel with <CTRL>C
◆ gaugeSAV() [1/2]
| void Basda::DGauge::gaugeSAV | ( | int | _save | ) |
function to store to teh EEPROM
- Parameters
-
_save specifies the parameters to be saved (0=default parameters, 1=user parameters)
◆ gaugeSAV() [2/2]
| void Basda::DGauge::gaugeSAV | ( | int | _save | ) |
function to store to teh EEPROM
- Parameters
-
_save specifies the parameters to be saved (0=default parameters, 1=user parameters)
◆ gaugeSC() [1/2]
| void Basda::DGauge::gaugeSC | ( | int | _head, |
| int & | _sourceOn, | ||
| int & | _sourceOff, | ||
| double & | _valOn, | ||
| double & | _valOff | ||
| ) |
function for the sensor controll
- Parameters
-
_head specifies the controlled sensor (1-2) _sourceOn source for switching on controll _sourceOff source for switching off controll _valOn value for switching on _valOff value for switching off
◆ gaugeSC() [2/2]
| void Basda::DGauge::gaugeSC | ( | int | _head, |
| int & | _sourceOn, | ||
| int & | _sourceOff, | ||
| double & | _valOn, | ||
| double & | _valOff | ||
| ) |
function for the sensor controll
- Parameters
-
_head specifies the controlled sensor (1-2) _sourceOn source for switching on controll _sourceOff source for switching off controll _valOn value for switching on _valOff value for switching off
◆ gaugeSCT() [1/2]
| void Basda::DGauge::gaugeSCT | ( | int & | _display | ) |
function for the display channel
- Parameters
-
_display specifies the sensor to be used at the display
◆ gaugeSCT() [2/2]
| void Basda::DGauge::gaugeSCT | ( | int & | _display | ) |
function for the display channel
- Parameters
-
_display specifies the sensor to be used at the display
◆ gaugeSEN() [1/4]
| void Basda::DGauge::gaugeSEN | ( | int | _set1, |
| int | _set2, | ||
| int & | _mode1, | ||
| int & | _mode2 | ||
| ) |
function to enable or disable the sensors and read the changes
- Parameters
-
_set1 mode change for sensor 1 _set2 mode change for sensor 2 _mode1 current mode of sensor 1 _mode2 current mode of sensor 2
◆ gaugeSEN() [2/4]
| void Basda::DGauge::gaugeSEN | ( | int | _set1, |
| int | _set2, | ||
| int & | _mode1, | ||
| int & | _mode2 | ||
| ) |
function to enable or disable the sensors and read the changes
- Parameters
-
_set1 mode change for sensor 1 _set2 mode change for sensor 2 _mode1 current mode of sensor 1 _mode2 current mode of sensor 2
◆ gaugeSEN() [3/4]
| void Basda::DGauge::gaugeSEN | ( | int & | _mode1, |
| int & | _mode2 | ||
| ) |
function to get current mode set
- Parameters
-
_mode1 current mode of sensor 1 _mode2 current mode of sensor 2
◆ gaugeSEN() [4/4]
| void Basda::DGauge::gaugeSEN | ( | int & | _mode1, |
| int & | _mode2 | ||
| ) |
function to get current mode set
- Parameters
-
_mode1 current mode of sensor 1 _mode2 current mode of sensor 2
◆ gaugeSP() [1/2]
| void Basda::DGauge::gaugeSP | ( | int | _func, |
| int & | _channel, | ||
| double & | _low, | ||
| double & | _high | ||
| ) |
function for the threshold parameters and the switching function
- Parameters
-
_func specifies the switching function (1-4) _channel channel the function applies to _low lower threshold _high upper threshold
◆ gaugeSP() [2/2]
| void Basda::DGauge::gaugeSP | ( | int | _func, |
| int & | _channel, | ||
| double & | _low, | ||
| double & | _high | ||
| ) |
function for the threshold parameters and the switching function
- Parameters
-
_func specifies the switching function (1-4) _channel channel the function applies to _low lower threshold _high upper threshold
◆ gaugeSPS() [1/2]
| void Basda::DGauge::gaugeSPS | ( | structSPS & | _status | ) |
function to get the status of a switching function
- Parameters
-
_status status vector
◆ gaugeSPS() [2/2]
| void Basda::DGauge::gaugeSPS | ( | structSPS & | _status | ) |
function to get the status of a switching function
- Parameters
-
_status status vector
◆ gaugeTID() [1/2]
| void Basda::DGauge::gaugeTID | ( | std::string & | _type1, |
| std::string & | _type2 | ||
| ) |
function to identify the sensor types
- Parameters
-
_type1 type of sensor 1 _type2 type of sensor 2
◆ gaugeTID() [2/2]
| void Basda::DGauge::gaugeTID | ( | std::string & | _type1, |
| std::string & | _type2 | ||
| ) |
function to identify the sensor types
- Parameters
-
_type1 type of sensor 1 _type2 type of sensor 2
◆ gaugeTKB() [1/2]
| void Basda::DGauge::gaugeTKB | ( | structTKB & | _pressed | ) |
keyboard test
- Parameters
-
_pressed struct for the status of the four buttons
◆ gaugeTKB() [2/2]
| void Basda::DGauge::gaugeTKB | ( | structTKB & | _pressed | ) |
keyboard test
- Parameters
-
_pressed struct for the status of the four buttons
◆ gaugeTLC() [1/2]
| void Basda::DGauge::gaugeTLC | ( | int & | _status | ) |
torrlock
- Parameters
-
_status status of the lock
◆ gaugeTLC() [2/2]
| void Basda::DGauge::gaugeTLC | ( | int & | _status | ) |
torrlock
- Parameters
-
_status status of the lock
◆ gaugeUNI() [1/2]
| void Basda::DGauge::gaugeUNI | ( | int & | _unit | ) |
function for the unit
- Parameters
-
_unit the unit used
◆ gaugeUNI() [2/2]
| void Basda::DGauge::gaugeUNI | ( | int & | _unit | ) |
function for the unit
- Parameters
-
_unit the unit used
◆ gaugeWDT() [1/2]
| void Basda::DGauge::gaugeWDT | ( | int & | _dog | ) |
watchdog
- Parameters
-
_dog type of watchdog
◆ gaugeWDT() [2/2]
| void Basda::DGauge::gaugeWDT | ( | int & | _dog | ) |
watchdog
- Parameters
-
_dog type of watchdog
◆ openChatLine() [1/2]
| void Basda::DGauge::openChatLine | ( | const std::string & | _address | ) |
function to open a chatline with the device to enable communication
- Parameters
-
_address string with the connection address
◆ openChatLine() [2/2]
| void Basda::DGauge::openChatLine | ( | const std::string & | _address | ) |
function to open a chatline with the device to enable communication
- Parameters
-
_address string with the connection address
◆ readMsg() [1/2]
|
protected |
function to read the answer from the device
- Parameters
-
_rcv string to store the answer
◆ readMsg() [2/2]
|
protected |
function to read the answer from the device
- Parameters
-
_rcv string to store the answer
◆ sendMsg() [1/2]
|
protected |
function to send a command to the device connected
- Parameters
-
_cmd command to send
- Returns
- number of chars sent
◆ sendMsg() [2/2]
|
protected |
function to send a command to the device connected
- Parameters
-
_cmd command to send
- Returns
- number of chars sent
Member Data Documentation
◆ m_active
|
private |
boolean to indicate an active connection
◆ m_chat
|
private |
the member chatline used for the communication
◆ m_conMode
|
protected |
current continous mode set to the device
- Note
- 0=100ms, 1=1s, 2=1min
◆ m_set
|
protected |
boolean to indicate wheather setting or getting of the functions should be used
◆ m_term
|
private |
string containing the terminators for the sent and receaved messages
The documentation for this class was generated from the following files:
- TwiceAsNice/basda-tempo/doc/include/PfeifferDGauge.h
- TwiceAsNice/basda-tempo/doc/include/PfeifferDGauge.cc
