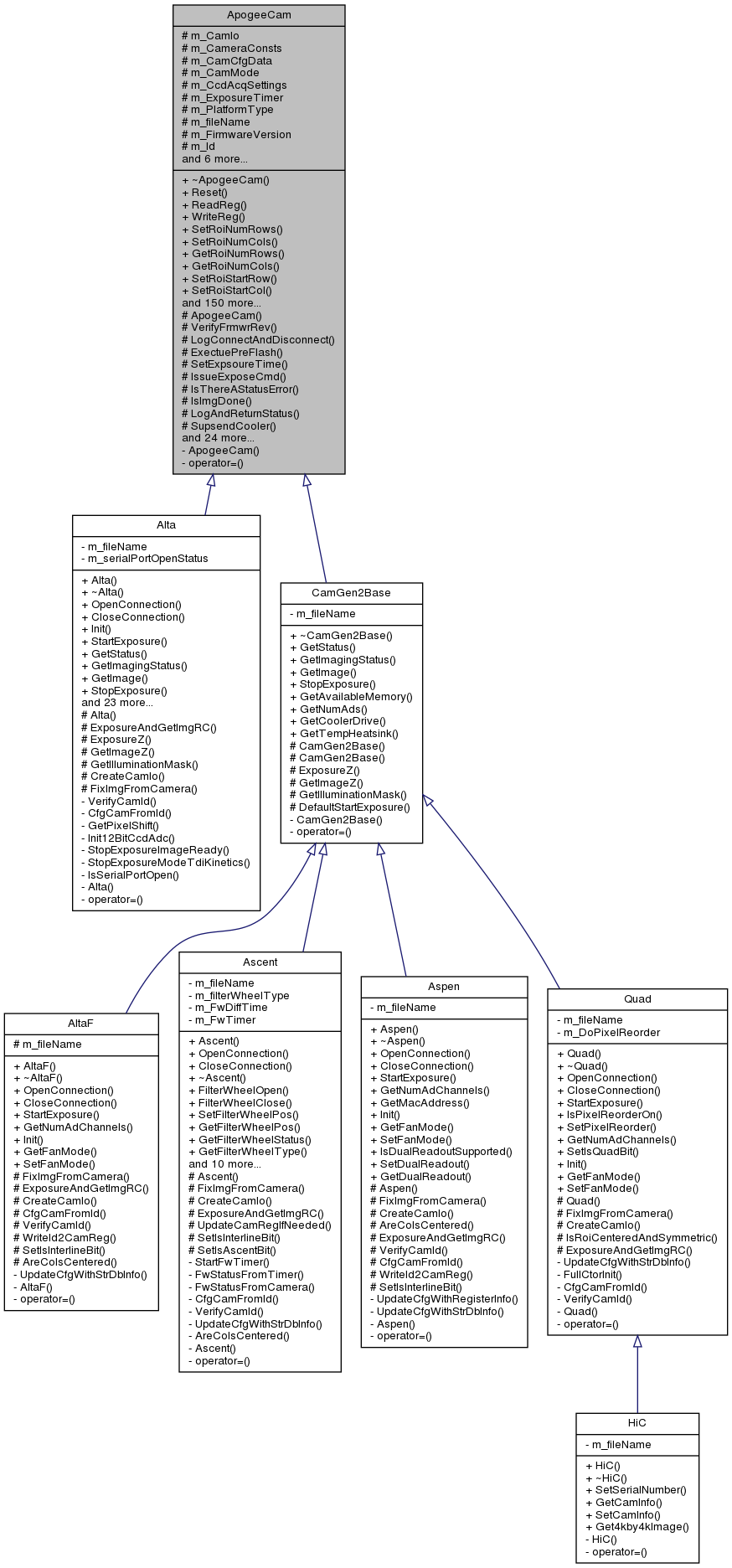
Base class for apogee cameras. More...
#include <ApogeeCam.h>

Protected Attributes | |
| std::shared_ptr< CameraIo > | m_CamIo |
| std::shared_ptr< PlatformData > | m_CameraConsts |
| std::shared_ptr< CApnCamData > | m_CamCfgData |
| std::shared_ptr< ModeFsm > | m_CamMode |
| std::shared_ptr< CcdAcqParams > | m_CcdAcqSettings |
| std::shared_ptr< ApgTimer > | m_ExposureTimer |
| CamModel::PlatformType | m_PlatformType |
| const std::string | m_fileName |
| uint16_t | m_FirmwareVersion |
| uint16_t | m_Id |
| uint16_t | m_NumImgsDownloaded |
| bool | m_ImageInProgress |
| bool | m_IsPreFlashOn |
| bool | m_IsInitialized |
| bool | m_IsConnected |
| double | m_LastExposureTime |
Private Member Functions | |
| ApogeeCam (const ApogeeCam &) | |
| ApogeeCam & | operator= (ApogeeCam &) |
Detailed Description
Base class for apogee cameras.
This Source Code Form is subject to the terms of the Mozilla Public License, v. 2.0. If a copy of the MPL was not distributed with this file, You can obtain one at http://mozilla.org/MPL/2.0/.
Copyright(c) 2009 Apogee Instruments, Inc.
Constructor & Destructor Documentation
◆ ~ApogeeCam()
|
virtual |
◆ ApogeeCam() [1/2]
|
protected |
◆ ApogeeCam() [2/2]
Member Function Documentation
◆ AdcParamCheck()
|
protected |
◆ AreFlushCmdsDisabled()
| bool ApogeeCam::AreFlushCmdsDisabled | ( | ) |
Retruns if flushing commands have been disabled.
- Exceptions
-
std::runtime_error
◆ CancelExposureNoThrow()
|
protected |
◆ CfgCamFromId()
|
protectedpure virtual |
◆ CheckAndWaitForStatus()
|
protected |
◆ ClearAllRegisters()
|
protected |
◆ CloseConnection()
|
pure virtual |
Closes the IO connection to the camera. IMPORTANT: If this call is made if camera is in an error condition, then the function will try to reset the interface. Thus it is not guaranteed that the address for the camera will be the same after this function is called.
- Exceptions
-
std::runtime_error
◆ DefaultCfgCamFromId()
|
protected |
◆ DefaultCloseConnection()
|
protected |
◆ DefaultGetFanMode()
|
protected |
◆ DefaultGetTempHeatsink()
|
protected |
◆ DefaultInit()
|
protected |
◆ DefaultSetFanMode()
|
protected |
◆ ExectuePreFlash()
|
protected |
◆ ExposureAndGetImgRC()
◆ ExposureZ()
|
protectedpure virtual |
Implemented in Alta, and CamGen2Base.
◆ FixImgFromCamera()
◆ GetAdcGain()
This function returns the analog to digital converter gain value for the given ad and channel.
- Parameters
-
[in] ad The analog to digital convert to query. Valid range is 0 to 1 - GetNumAds(). [in] channel Channel on the ADC to query. Valid range is 0 to 1 - GetNumAdChannels().
- Exceptions
-
std::runtime_error
◆ GetAdcOffset()
This function returns the analog to digital converter offset value for the given ad and channel.
- Parameters
-
[in] ad The analog to digital convert to query. Valid range is 0 to 1 - GetNumAds(). [in] channel Channel on the ADC to query. Valid range is 0 to 1 - GetNumAdChannels().
- Exceptions
-
std::runtime_error
◆ GetAvailableMemory()
|
pure virtual |
Returns the amount of available memory for storing images in terms of kilobytes (KB).
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ GetCameraMode()
| Apg::CameraMode ApogeeCam::GetCameraMode | ( | ) |
Returns the camera's operational mode.
- Exceptions
-
std::runtime_error
◆ GetCcdAdcResolution()
| Apg::Resolution ApogeeCam::GetCcdAdcResolution | ( | ) |
Returns the camera's digitization resolution.
- Exceptions
-
std::runtime_error
◆ GetCcdAdcSpeed()
| Apg::AdcSpeed ApogeeCam::GetCcdAdcSpeed | ( | ) |
Returns the camera's acquisition speed.
- Exceptions
-
std::runtime_error
◆ GetCoolerBackoffPoint()
| double ApogeeCam::GetCoolerBackoffPoint | ( | ) |
Returns the cooler backoff temperature in Celsius.
- Exceptions
-
std::runtime_error
◆ GetCoolerDrive()
|
pure virtual |
Drive level applied to the temp controller. Expressed as a percentage from 0% to 100%.
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ GetCoolerSetPoint()
| double ApogeeCam::GetCoolerSetPoint | ( | ) |
Returns the desired cooler temperature in Celsius.
- Exceptions
-
std::runtime_error
◆ GetCoolerStatus()
| Apg::CoolerStatus ApogeeCam::GetCoolerStatus | ( | ) |
Returns the current cooler status
- Exceptions
-
std::runtime_error
◆ GetDriverVersion()
| std::string ApogeeCam::GetDriverVersion | ( | ) |
On Windows returns device driver version
- Exceptions
-
std::runtime_error
◆ GetFanMode()
|
pure virtual |
◆ GetFirmwareRev()
| uint16_t ApogeeCam::GetFirmwareRev | ( | ) |
Version number of the camera control firmware.
- Exceptions
-
std::runtime_error
◆ GetFlushBinningRows()
| uint16_t ApogeeCam::GetFlushBinningRows | ( | ) |
Returns the row (vertical) binning value used during flushing operations.
- Exceptions
-
std::runtime_error
◆ GetIlluminationMask()
|
protectedpure virtual |
Implemented in Alta, and CamGen2Base.
◆ GetImage()
|
pure virtual |
Downloads the image data from the camera.
- Parameters
-
[out] out Vector that will recieve the image data
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ GetImageCount()
| uint16_t ApogeeCam::GetImageCount | ( | ) |
Returns the number of sequence images set by the user.
- Exceptions
-
std::runtime_error
◆ GetImageZ()
|
protectedpure virtual |
Implemented in Alta, and CamGen2Base.
◆ GetImagingStatus()
|
pure virtual |
Returns the current imaging state of the camera.
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ GetImgSequenceCount()
| uint16_t ApogeeCam::GetImgSequenceCount | ( | ) |
Returns the number of images in a sequence the camera has acquired. The camera updates this value after the StartExposure function has been called.
- Exceptions
-
std::runtime_error
◆ GetInfo()
| std::string ApogeeCam::GetInfo | ( | ) |
Returns information on the camera such as model, sensor, ids, etc.
- Exceptions
-
std::runtime_error
◆ GetInputVoltage()
| double ApogeeCam::GetInputVoltage | ( | ) |
Returns the operating input voltage to the camera.
- Exceptions
-
std::runtime_error
◆ GetInterfaceType()
| CamModel::InterfaceType ApogeeCam::GetInterfaceType | ( | ) |
Retruns the camera interface type.
- Exceptions
-
std::runtime_error
◆ GetIoPortAssignment()
| uint16_t ApogeeCam::GetIoPortAssignment | ( | ) |
Returns the I/O port's signal usage.
- Exceptions
-
std::runtime_error
◆ GetIoPortBlankingBits()
| uint16_t ApogeeCam::GetIoPortBlankingBits | ( | ) |
- Exceptions
-
std::runtime_error
◆ GetIoPortData()
| uint16_t ApogeeCam::GetIoPortData | ( | ) |
Returns the I/O port data.
- Exceptions
-
std::runtime_error
◆ GetIoPortDirection()
| uint16_t ApogeeCam::GetIoPortDirection | ( | ) |
Returns the IO Port Direction.
- Exceptions
-
std::runtime_error
◆ GetKineticsSectionHeight()
| uint16_t ApogeeCam::GetKineticsSectionHeight | ( | ) |
Returns the vertical height for a Kinetics Mode section.
- Exceptions
-
std::runtime_error
◆ GetKineticsSections()
| uint16_t ApogeeCam::GetKineticsSections | ( | ) |
Retruns the number of sections in a Kinetics Mode image.
- Exceptions
-
std::runtime_error
◆ GetKineticsShiftInterval()
| double ApogeeCam::GetKineticsShiftInterval | ( | ) |
Returns the incremental rate between Kinetics Mode sections.
- Exceptions
-
std::runtime_error
◆ GetLedAState()
| Apg::LedState ApogeeCam::GetLedAState | ( | ) |
Returns the state of LED light A.
- Exceptions
-
std::runtime_error
◆ GetLedBrightness()
| double ApogeeCam::GetLedBrightness | ( | ) |
Returns brightness/intensity level of the LED light within the cap of the camera head. Expressed as a percentage from 0% to 100%.
- Exceptions
-
std::runtime_error
◆ GetLedBState()
| Apg::LedState ApogeeCam::GetLedBState | ( | ) |
Returns the state of LED light B.
- Exceptions
-
std::runtime_error
◆ GetLedMode()
| Apg::LedMode ApogeeCam::GetLedMode | ( | ) |
Returns the mode of LED status lights.
- Exceptions
-
std::runtime_error
◆ GetMaxBinCols()
| uint16_t ApogeeCam::GetMaxBinCols | ( | ) |
Returns the maximum number of binning columns (horizontal) for the camera.
- Exceptions
-
std::runtime_error
◆ GetMaxBinRows()
| uint16_t ApogeeCam::GetMaxBinRows | ( | ) |
Returns the maximum number of binning rows (vertical) for the camera.
- Exceptions
-
std::runtime_error
◆ GetMaxExposureTime()
| double ApogeeCam::GetMaxExposureTime | ( | ) |
Returns the maximum exposure duration.
- Exceptions
-
std::runtime_error
◆ GetMaxImgCols()
| uint16_t ApogeeCam::GetMaxImgCols | ( | ) |
Returns number of imaging columns in terms of unbinned pixels. This value depends on the camera's sensor geometry.
- Exceptions
-
std::runtime_error
◆ GetMaxImgRows()
| uint16_t ApogeeCam::GetMaxImgRows | ( | ) |
Returns number of imaging rows in terms of unbinned pixels. This value depends on the camera's sensor geometry.
- Exceptions
-
std::runtime_error
◆ GetMinExposureTime()
| double ApogeeCam::GetMinExposureTime | ( | ) |
Returns the suggested minimum exposure duration, based on the camera's configuration.
- Exceptions
-
std::runtime_error
◆ GetModel()
| std::string ApogeeCam::GetModel | ( | ) |
Returns a camera model.
- Exceptions
-
std::runtime_error
◆ GetNumAdChannels()
|
pure virtual |
◆ GetNumAds()
|
pure virtual |
Returns the number of analog to digital (AD) converters on the camera.
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ GetNumOverscanCols()
| uint16_t ApogeeCam::GetNumOverscanCols | ( | ) |
Returns the number of overscan columns in terms of unbinned pixels. This variable depends upon the particular sensor used within the camera.
- Exceptions
-
std::runtime_error
◆ GetPixelHeight()
| double ApogeeCam::GetPixelHeight | ( | ) |
Returns sensor's pixels height in micrometers.
- Exceptions
-
std::runtime_error
◆ GetPixelWidth()
| double ApogeeCam::GetPixelWidth | ( | ) |
Returns sensor's pixels width in micrometers.
- Exceptions
-
std::runtime_error
◆ GetPlatformType()
| CamModel::PlatformType ApogeeCam::GetPlatformType | ( | ) |
Returns camera platform type.
- Exceptions
-
std::runtime_error
◆ GetPreFlash()
|
inline |
Returns IR pre-flash state ( true = turned on, false = turned off )
- Exceptions
-
std::runtime_error
◆ GetRoiBinCol()
| uint16_t ApogeeCam::GetRoiBinCol | ( | ) |
Returns the number of binning columns.
- Exceptions
-
std::runtime_error
◆ GetRoiBinRow()
| uint16_t ApogeeCam::GetRoiBinRow | ( | ) |
Returns the number of binning rows.
- Exceptions
-
std::runtime_error
◆ GetRoiNumCols()
| uint16_t ApogeeCam::GetRoiNumCols | ( | ) |
Returns the number of imaging ROI columns
- Exceptions
-
std::runtime_error
◆ GetRoiNumRows()
| uint16_t ApogeeCam::GetRoiNumRows | ( | ) |
Returns the number of imaging ROI rows
- Exceptions
-
std::runtime_error
◆ GetRoiStartCol()
| uint16_t ApogeeCam::GetRoiStartCol | ( | ) |
Returns the starting column for the imaging ROI
- Exceptions
-
std::runtime_error
◆ GetRoiStartRow()
| uint16_t ApogeeCam::GetRoiStartRow | ( | ) |
Returns the starting row for the imaging ROI
- Exceptions
-
std::runtime_error
◆ GetSensor()
| std::string ApogeeCam::GetSensor | ( | ) |
Returns the sensor model installed in the camera
- Exceptions
-
std::runtime_error
◆ GetSequenceDelay()
| double ApogeeCam::GetSequenceDelay | ( | ) |
Returns he amount of time between the close of the shutter and the beginning of the sensor readout.
- Exceptions
-
std::runtime_error
◆ GetSerialNumber()
| std::string ApogeeCam::GetSerialNumber | ( | ) |
Returns a special OEM-specific serial number.
- Exceptions
-
std::runtime_error
◆ GetShutterCloseDelay()
| double ApogeeCam::GetShutterCloseDelay | ( | ) |
Returns the shutter close delay
- Exceptions
-
std::runtime_error
◆ GetShutterState()
| Apg::ShutterState ApogeeCam::GetShutterState | ( | ) |
Returns the current shutter state.
- Exceptions
-
std::runtime_error
◆ GetShutterStrobePeriod()
| double ApogeeCam::GetShutterStrobePeriod | ( | ) |
Returns ths shutter strobe period.
- Exceptions
-
std::runtime_error
◆ GetShutterStrobePosition()
| double ApogeeCam::GetShutterStrobePosition | ( | ) |
Returns the shutter strobe position.
- Exceptions
-
std::runtime_error
◆ GetStatus()
|
pure virtual |
Returns the camera's status registers as a CameraStatusRegs class.
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ GetTdiBinningRows()
| uint16_t ApogeeCam::GetTdiBinningRows | ( | ) |
Returns the number TDI binning rows
- Exceptions
-
std::runtime_error
◆ GetTdiCounter()
| uint16_t ApogeeCam::GetTdiCounter | ( | ) |
Dynamically incrementing count during a TDI image. The final value of TDICounter equals TDIRows. Valid range is between 1 and 65535.
- Exceptions
-
std::runtime_error
◆ GetTdiRate()
| double ApogeeCam::GetTdiRate | ( | ) |
Returns the rate between TDI rows.
- Exceptions
-
std::runtime_error
◆ GetTdiRows()
| uint16_t ApogeeCam::GetTdiRows | ( | ) |
Returns the total number of rows in the TDI image.
- Exceptions
-
std::runtime_error
◆ GetTempCcd()
| double ApogeeCam::GetTempCcd | ( | ) |
Returns the current CCD temperature in degrees Celsius.
- Exceptions
-
std::runtime_error
◆ GetTempHeatsink()
|
pure virtual |
Returns the current Heatsink temperature in degrees Celsius. The Ascent camera platform does not support reading the heatsink temperature, and this property will return -255.
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ GetTotalCols()
| uint16_t ApogeeCam::GetTotalCols | ( | ) |
Returns the total number of physical columns on the CCD. This value depends on the camera's sensor geometry.
- Exceptions
-
std::runtime_error
◆ GetTotalRows()
| uint16_t ApogeeCam::GetTotalRows | ( | ) |
Returns the total number of physical rows on the CCD. This value depends on the camera's sensor geometry.
- Exceptions
-
std::runtime_error
◆ GetUsbFirmwareVersion()
| std::string ApogeeCam::GetUsbFirmwareVersion | ( | ) |
Returns USB firmware version.
- Exceptions
-
std::runtime_error
◆ GetUsbVendorInfo()
Returns the USB ids associated with the camera system.
- Parameters
-
[out] VendorId USB vendor id [out] ProductId USB product id [out] DeviceId USB device id
- Exceptions
-
std::runtime_error
◆ GetVariableSequenceDelay()
| bool ApogeeCam::GetVariableSequenceDelay | ( | ) |
Returns the variable sequence delay state.
- Exceptions
-
std::runtime_error
◆ GrabImageAndThrowItAway()
|
protected |
◆ HardStopExposure()
|
protected |
◆ Init()
|
pure virtual |
◆ InitShutterCloseDelay()
|
protected |
◆ IsAdSimModeOn()
| bool ApogeeCam::IsAdSimModeOn | ( | ) |
Status of camera simulator mode
- Exceptions
-
std::runtime_error
◆ IsBulkDownloadOn()
| bool ApogeeCam::IsBulkDownloadOn | ( | ) |
Returns the state of bulk downloads (true = on, false = off)
- Exceptions
-
std::runtime_error
◆ IsCCD()
| bool ApogeeCam::IsCCD | ( | ) |
Returns true if the sensor is a CCD; false if CMOS
- Exceptions
-
std::runtime_error
◆ IsColor()
| bool ApogeeCam::IsColor | ( | ) |
Returns true is CCD sensor has color dyes, and false otherwise
- Exceptions
-
std::runtime_error
◆ IsConnected()
|
inline |
Returns if the host is connected to a camera
◆ IsCoolerOn()
| bool ApogeeCam::IsCoolerOn | ( | ) |
Returns the state of the camera's cooler (true = on, false = off);
- Exceptions
-
std::runtime_error
◆ IsCoolingRegulated()
| bool ApogeeCam::IsCoolingRegulated | ( | ) |
Returns true if the camera supports regulated cooling, false if regulated cooling is not available.
- Exceptions
-
std::runtime_error
◆ IsCoolingSupported()
| bool ApogeeCam::IsCoolingSupported | ( | ) |
Returns true if the camera supports cooling, false if no cooling is available.
- Exceptions
-
std::runtime_error
◆ IsFastSequenceOn()
| bool ApogeeCam::IsFastSequenceOn | ( | ) |
Retruns the state of fast sequences (true = on, false = off)
- Exceptions
-
std::runtime_error
◆ IsImgDone()
|
protected |
◆ IsInitialized()
◆ IsInterline()
| bool ApogeeCam::IsInterline | ( | ) |
Returns true if the sensor is an Interline CCD and false otherwise.
- Exceptions
-
std::runtime_error
◆ IsOverscanDigitized()
| bool ApogeeCam::IsOverscanDigitized | ( | ) |
- Returns
- The digitize overscan state (on = true, off = false)
- Exceptions
-
std::runtime_error
◆ IsPipelineDownloadOn()
| bool ApogeeCam::IsPipelineDownloadOn | ( | ) |
Returns the state of pipelined downloads (true = on, false = off)
- Exceptions
-
std::runtime_error
◆ IsPostExposeFlushingDisabled()
| bool ApogeeCam::IsPostExposeFlushingDisabled | ( | ) |
Retruns if post exposure flushing has been disabled.
- Exceptions
-
std::runtime_error
◆ IsSerialASupported()
| bool ApogeeCam::IsSerialASupported | ( | ) |
Returns whether the camera supports Serial Port A. NOTE: Ascent cameras do not have serial ports.
- Exceptions
-
std::runtime_error
◆ IsSerialBSupported()
| bool ApogeeCam::IsSerialBSupported | ( | ) |
Returns whether the camera supports Serial Port B. NOTE: Ascent cameras do not have serial ports.
- Exceptions
-
std::runtime_error
◆ IsShutterAmpCtrlOn()
| bool ApogeeCam::IsShutterAmpCtrlOn | ( | ) |
Returns shutter amp control state (true = CCD voltage disabled, false = CCD voltage enabled)
- Exceptions
-
std::runtime_error
◆ IsShutterForcedClosed()
| bool ApogeeCam::IsShutterForcedClosed | ( | ) |
Returns if the shutter is in the Apg::ShutterState_ForceClosed state (true = yes, false = no)
- Exceptions
-
std::runtime_error
◆ IsShutterForcedOpen()
| bool ApogeeCam::IsShutterForcedOpen | ( | ) |
Returns if the shutter is in the Apg::ShutterState_ForceOpen state (true = yes, false = no)
- Exceptions
-
std::runtime_error
◆ IsShutterOpen()
| bool ApogeeCam::IsShutterOpen | ( | ) |
Returns shutter state (true = open, false = closed)
- Exceptions
-
std::runtime_error
◆ IssueExposeCmd()
|
protected |
◆ IsThereAStatusError()
|
protected |
◆ IsTriggerExternalReadoutOn()
| bool ApogeeCam::IsTriggerExternalReadoutOn | ( | ) |
Returns true if external readout trigger is on, false if off.
- Exceptions
-
std::runtime_error
◆ IsTriggerExternalShutterOn()
| bool ApogeeCam::IsTriggerExternalShutterOn | ( | ) |
Returns true if external shutter trigger is on, false if off.
- Exceptions
-
std::runtime_error
◆ IsTriggerNormEachOn()
| bool ApogeeCam::IsTriggerNormEachOn | ( | ) |
Returns true if normal each trigger is on, false if off.
- Exceptions
-
std::runtime_error
◆ IsTriggerNormGroupOn()
| bool ApogeeCam::IsTriggerNormGroupOn | ( | ) |
Returns true if normal group trigger is on, false if off.
- Exceptions
-
std::runtime_error
◆ IsTriggerTdiKinEachOn()
| bool ApogeeCam::IsTriggerTdiKinEachOn | ( | ) |
Returns true if TDI-Kinetrics each trigger is on, false if off.
- Exceptions
-
std::runtime_error
◆ IsTriggerTdiKinGroupOn()
| bool ApogeeCam::IsTriggerTdiKinGroupOn | ( | ) |
Returns true if TDI-Kinetrics group trigger is on, false if off.
- Exceptions
-
std::runtime_error
◆ LogAndReturnStatus()
|
protected |
◆ LogConnectAndDisconnect()
|
protected |
◆ OpenConnection()
|
pure virtual |
Opens a connection from the PC to the camera. The results strings from the FindDeviceUsb::Find() and the FindDeviceEthernet::Find() functions. provide the input into this function.
- Parameters
-
[in] ioType specifies camera IO interface 'usb' or 'ethernet' [in] DeviceAddr specifies the address of the camera on the interface [in] FirmwareRev Camera's firmware revision. Used to verify interface connection. [in] Id Camera's ID. Used to verify interface connection and setup camera specfic parameters.
- Exceptions
-
std::runtime_error
◆ operator=()
◆ PauseTimer()
| void ApogeeCam::PauseTimer | ( | bool | TurnOn | ) |
Pauses the current exposure by closing the shutter and pausing the exposure timer.
- Parameters
-
[in] TurnOn A state variable that controls the pausing of the exposure timer. A value of true will issue a command to pause the timer. A value offalse will issue a command to unpause the timer. Multiple calls with this parameter set consistently to either state (i.e. back-to-back true states) have no effect.
- Exceptions
-
std::runtime_error
◆ ReadReg()
- Parameters
-
[in] reg Register
- Returns
- Register value
- Exceptions
-
std::runtime_error
◆ ReadStrDatabase()
| CamInfo::StrDb ApogeeCam::ReadStrDatabase | ( | ) |
◆ Reset() [1/2]
| void ApogeeCam::Reset | ( | ) |
Resets the camera's internal pixel processing engines, and then starts the system flushing again. This function will cancel and pending expsoures. For more information on when to use this function please review the Exception Handling page.
- Exceptions
-
std::runtime_error
◆ Reset() [2/2]
|
protected |
◆ ResumeCooler()
|
protected |
◆ SetAdcGain()
Sets the analog to digital converter gain value for the given ad and channel.
- Parameters
-
[in] gain The new gain value. 0-1023 is a valid range for Alta cameras. 0-63 is a valid range for Ascent cameras. [in] ad The analog to digital convert to set. Valid range is 0 to 1 - GetNumAds(). [in] channel Channel on the ADC to set. Valid range is 0 to 1 - GetNumAdChannels().
- Exceptions
-
std::runtime_error
◆ SetAdcOffset()
Sets the analog to digital converter offset value for the given ad and channel.
- Parameters
-
[in] offset The new offset value. 0-255 is a valid range for Alta cameras. 0-511 is a valid range for Ascent cameras. [in] ad The analog to digital convert to set. Valid range is 0 to 1 - GetNumAds(). [in] channel Channel on the ADC to set. Valid range is 0 to 1 - GetNumAdChannels().
- Exceptions
-
std::runtime_error
◆ SetAdSimMode()
| void ApogeeCam::SetAdSimMode | ( | bool | TurnOn | ) |
Specifies that the camera operation should be defined using simulated data for image parameters. param [in] TurnOn True turns on simulator mode. False turns of the simulator.
- Exceptions
-
std::runtime_error
◆ SetBulkDownload()
| void ApogeeCam::SetBulkDownload | ( | bool | TurnOn | ) |
Enables/Disables how image data will be retrieved from the camera during a sequence. For USB camera systems, this variable is used to determine whether the returned data will be downloaded in bulk, or streamed as it becomes available. By definition, bulk download must be false when the continuous imaging is enabled, since setting this variable true assumes that the number of images in a series is known in advance of starting the exposure. The default value for this variable after initialization is true.
- Parameters
-
[in] TurnOn true enables bulk download, false disables this feature
- Exceptions
-
std::runtime_error
◆ SetCameraMode()
| void ApogeeCam::SetCameraMode | ( | Apg::CameraMode | mode | ) |
Returns the camera's operational mode. The default value for this variable after initialization is Apg::CameraMode_Normal.
- Exceptions
-
std::runtime_error
◆ SetCcdAdcResolution()
| void ApogeeCam::SetCcdAdcResolution | ( | Apg::Resolution | res | ) |
Sets the camera's digitization resolution. NOTE: This feature is scheduled for deprecation and only functional on AltaU cameras. Please use the SetCcdAdcSpeed(Apg::AdcSpeed speed) function; 16bit = Normal, 12bit = Fast.
- Exceptions
-
std::runtime_error
◆ SetCcdAdcSpeed()
| void ApogeeCam::SetCcdAdcSpeed | ( | Apg::AdcSpeed | speed | ) |
Sets the camera's acquisition speed. The default value after initialization is Apg::AdcSpeed_Normal.
For the AltaU setting the camera's speed to normal/fast is the equivalant of SetCcdAdcResolution( 16bit/12bit ). Calling GetCcdAdcResolution() after setting the ADC speed will return 16bit for normal speed and 12bit for fast.
◆ SetCooler()
| void ApogeeCam::SetCooler | ( | bool | TurnOn | ) |
Sets the state of the camera's cooler
- Parameters
-
[in] TurnOn true = on, false = off
- Exceptions
-
std::runtime_error
◆ SetCoolerBackoffPoint()
| void ApogeeCam::SetCoolerBackoffPoint | ( | double | point | ) |
Sets the cooler backoff temperature of the cooler subsystem in Celsius. If the cooler is unable to reach the desired cooler set point, the Backoff Point is number of degrees up from the lowest point reached. Used to prevent the cooler from being constant driven with max power to an unreachable temperature. The default value of this variable after initialization can vary depending on camera model, but is typically set at 2.0 degrees Celsius.
- Parameters
-
[in] point Desired backoff point. Must be greater than 0.
- Exceptions
-
std::runtime_error
◆ SetCoolerSetPoint()
| void ApogeeCam::SetCoolerSetPoint | ( | double | point | ) |
Sets the desired cooler temperature in Celsius. If the input set point cannot be reached, the cooler subsystem will determine a new set point based on the backoff point and change the cooler status to Apg::CoolerStatus_Revision. An application should reread this property to see the new set point that the system is using. Once the application rereads this property, the status of Apg::CoolerStatus_Revision will be cleared.
- Parameters
-
[in] point Desired cooler set point
- Exceptions
-
std::runtime_error
◆ SetDigitizeOverscan()
Function is a no op. It is in this interface for backwards compatibility purposes. The way to get the overscan data is to set the ROI to capture it.
- Parameters
-
[in] TurnOn Toggling the digitize overscan variable
- Exceptions
-
std::runtime_error
◆ SetExpsoureTime()
|
protected |
◆ SetExternalTrigger()
| void ApogeeCam::SetExternalTrigger | ( | bool | TurnOn, |
| Apg::TriggerMode | trigMode, | ||
| Apg::TriggerType | trigType | ||
| ) |
Sets the external trigger mode and type.
For more information see Hardware Trigger page
- Parameters
-
[in] TurnOn true activates the trigger type and mode, false deactivates it [in] trigMode Trigger mode [in] trigType Trigger Type
- Exceptions
-
std::runtime_error
◆ SetFanMode()
Sets the current fan speed. The default value of this variable after initialization is Apg::FanMode_Low. Ascent cameras do not support programmable fan speed, thus writes using this property have no effect.
- Parameters
-
[in] mode Desired fan mode [in] PreCondCheck Setting PreCondCheck to false results in the pre-condition checking to be skipped.
PreCondCheck should ALWAYS be set to true.
- Exceptions
-
std::runtime_error
◆ SetFastSequence()
| void ApogeeCam::SetFastSequence | ( | bool | TurnOn | ) |
Enables/Disables very fast back to back exposures for interline CCDs only. Also referred to as Ratio Mode. The default value for this variable after initialization is false. Note that this property cannot be used in conjunction with the TriggerNormalEach property, since progressive scan is defined as having the least possible time between exposures. However, the FastSequence property may be used with a single trigger to start a series of images (using TriggerNormalGroup).
- Parameters
-
[in] TurnOn true enables fast sequences, false disables this feature
- Exceptions
-
std::runtime_error
◆ SetFlushBinningRows()
| void ApogeeCam::SetFlushBinningRows | ( | uint16_t | bin | ) |
Sets the row (vertical) binning value used during flushing operations. The default value after camera initialization is sensor-specific. NOTE: This is a specialized property designed for unique experiments. Applications and users will not normally need to modify this variable from the default value.
- Parameters
-
[in] bin The valid range for this property is between 1 and GetMaxBinRows().
- Exceptions
-
std::runtime_error
◆ SetFlushCommands()
| void ApogeeCam::SetFlushCommands | ( | bool | Disable | ) |
Enables/Disables any flushing command sent by the software to be recognized or unrecognized by the camera control firmware. This property may be used with SetPostExposeFlushing( bool Disable ) to completely stop all flushing operations within the camera. The default value of this variable after initialization is false. WARNING: This is a highly specialized property designed for very unique experiments. Applications and users will not normally need to modify this variable from the default value.
- Parameters
-
[in] Disable True disables flushing, false allows flushing after commands
- Exceptions
-
std::runtime_error
◆ SetImageCount()
| void ApogeeCam::SetImageCount | ( | uint16_t | count | ) |
Sets the number of images to take in an image sequence.
- Parameters
-
[in] count Number of image in the sequence to acquire.
- Exceptions
-
std::runtime_error
◆ SetIoPortAssignment()
| void ApogeeCam::SetIoPortAssignment | ( | uint16_t | assignment | ) |
Defines the signal usage for the I/O port. This function is only valid on AltaU systems.
- Bit 0 (I/O Signal 1): A value of zero (0) indicates that the I/O bit is user defined according to the specified IoPortDirection. A value of one (1) indicates that this I/O will be used as a trigger input.
- Bit 1 (I/O Signal 2): A value of zero (0) indicates that the I/O bit is user defined according to the specified IoPortDirection. A value of one (1) indicates that this I/O will be used as a shutter output.
- Bit 2 (I/O Signal 3): A value of zero (0) indicates that the I/O bit is user defined according to the specified IoPortDirection. A value of one (1) indicates that this I/O will be used as a shutter strobe output.
- Bit 3 (I/O Signal 4): A value of zero (0) indicates that the I/O bit is user defined according to the specified IoPortDirection. A value of one (1) indicates that this I/O will be used as an external shutter input.
- Bit 4 (I/O Signal 5): A value of zero (0) indicates that the I/O bit is user defined according to the specified IoPortDirection. A value of one (1) indicates that this I/O will be used for starting readout via an external signal.
- Bit 5 (I/O Signal 6): A value of zero (0) indicates that the I/O bit is user defined according to the specified IoPortDirection. A value of one (1) indicates that this I/O will be used for an input timer pulse.
- Parameters
-
[in] assignment The valid range is for the 6 LSBs, 0x0 to 0x3F.
- Exceptions
-
std::runtime_error
◆ SetIoPortBlankingBits()
| void ApogeeCam::SetIoPortBlankingBits | ( | uint16_t | blankingBits | ) |
- Exceptions
-
std::runtime_error
◆ SetIoPortData()
| void ApogeeCam::SetIoPortData | ( | uint16_t | data | ) |
Send data to the I/O port. Applications are responsible for toggling bits, i.e., if Bit 2 of the I/O port is specified as an OUT signal, and a 0x1 is written to this bit, it will remain 0x1 until 0x0 is written to the same bit.
- Parameters
-
[in] data Valid range of this property is for the 6 LSBs, 0x0 to 0x3F.
- Exceptions
-
std::runtime_error
◆ SetIoPortDirection()
| void ApogeeCam::SetIoPortDirection | ( | uint16_t | direction | ) |
This function is only valid on AltaU camera systems.
On Ascent camera systems, the direction cannot be configured.
Pins 1, 4, and 5 are always input and pins 2, 3, and 6 are always output.
- Bit 0: I/O Signal 1 (0=IN and 1=OUT)
- Bit 1: I/O Signal 2 (0=IN and 1=OUT)
- Bit 2: I/O Signal 3 (0=IN and 1=OUT)
- Bit 3: I/O Signal 4 (0=IN and 1=OUT)
- Bit 4: I/O Signal 5 (0=IN and 1=OUT)
- Bit 5: I/O Signal 6 (0=IN and 1=OUT)
- Parameters
-
[in] direction Valid range is for the 6 LSBs, 0x0 to 0x3F.
- Exceptions
-
std::runtime_error
◆ SetKineticsSectionHeight()
| void ApogeeCam::SetKineticsSectionHeight | ( | uint16_t | height | ) |
Set the vertical height for a Kinetics Mode section. Modifying this property also changes the value of the SetTdiBinningRows( uint16_t bin ) variable. The default value for this variable after initialization is 1.
- Parameters
-
[in] height Valid range for this variable is between 1 and the corresponding value of GetMaxBinRows().
- Exceptions
-
std::runtime_error
◆ SetKineticsSections()
| void ApogeeCam::SetKineticsSections | ( | uint16_t | sections | ) |
Sets the number of sections in a Kinetics Mode image. Modifying this property also changes the value of the SetTdiRows( uint16_t TdiRows )
- Parameters
-
[in] sections Valid range is 1 to 65535.
- Exceptions
-
std::runtime_error
◆ SetKineticsShiftInterval()
| void ApogeeCam::SetKineticsShiftInterval | ( | double | interval | ) |
Sets the incremental rate between Kinetics Mode sections. The default value for this variable after initialization is 0.100s. Modifying this property also changes the value of SetTdiRate( double TdiRate ).
- Parameters
-
[in] interval The valid range is from 5.12us to 336ms.
- Exceptions
-
std::runtime_error
◆ SetLedAState()
| void ApogeeCam::SetLedAState | ( | Apg::LedState | state | ) |
Sets the state of LED light A.
- Parameters
-
[in] state Desired Apg::LedState
- Exceptions
-
std::runtime_error
◆ SetLedBrightness()
| void ApogeeCam::SetLedBrightness | ( | double | PercentIntensity | ) |
Sets brightness/intensity level of the LED light within the cap of the camera head. The default value of this variable after initialization is 0%.
- Parameters
-
[in] PercentIntensity Valid range is 0-100.
- Exceptions
-
std::runtime_error
◆ SetLedBState()
| void ApogeeCam::SetLedBState | ( | Apg::LedState | state | ) |
Sets the state of LED light B.
- Parameters
-
[in] state Desired Apg::LedState
- Exceptions
-
std::runtime_error
◆ SetLedMode()
| void ApogeeCam::SetLedMode | ( | Apg::LedMode | mode | ) |
Sets the mode of LED status lights.
- Parameters
-
[in] mode Desired Apg::LedMode
- Exceptions
-
std::runtime_error
◆ SetNumAdOutputs()
◆ SetPipelineDownload()
| void ApogeeCam::SetPipelineDownload | ( | bool | TurnOn | ) |
For USB camera systems, this variable is used to determine when ImageReady status is returned. When on, camera will return ImageReady status as soon as there is any data to download. When off, camera will not return ImageReady status until all data has been digitized and is ready for download. Turn on for faster downloads and increased frame rate in exchange for higher noise. Which option is best depends on your application. The default value for this variable after initialization is true.
- Parameters
-
[in] TurnOn true enables pipelined download, false disables this feature
- Exceptions
-
std::runtime_error
◆ SetPostExposeFlushing()
| void ApogeeCam::SetPostExposeFlushing | ( | bool | Disable | ) |
Enables/Disables the camera control firmware to/from immediately beginning an internal flush cycle after an exposure. This property may be used with SetFlushCommands( bool Disable ) to completely stop all flushing operations within the camera. The default value of this variable after initialization is false. WARNING: This is a highly specialized property designed for very unique experiments. Applications and users will not normally need to modify this variable from the default value.
- Parameters
-
[in] Disable True disables flushing, false allows flushing after exposures
- Exceptions
-
std::runtime_error
◆ SetPreFlash()
|
inline |
Toggles IR pre-flash control. IR pre-flash normalizes the sensor before an image is taken with a flash of IR. false is the default camera state. \ param [in] TurnOn, true turn IR pre-flash on, false turns pre-flash off.
- Exceptions
-
std::runtime_error
◆ SetRoiBinCol()
| void ApogeeCam::SetRoiBinCol | ( | uint16_t | bin | ) |
Sets the number of columns to bin (horizontal binning). Default value is 1. Binning is not allowed in Apg::AdcSpeed_Video mode or for quad readout ccds.
- Parameters
-
[in] bin Valid range is 1 - GetMaxBinCols()
- Exceptions
-
std::runtime_error
◆ SetRoiBinRow()
| void ApogeeCam::SetRoiBinRow | ( | uint16_t | bin | ) |
Sets the number of rows to bin (vertical binning). Default value is 1. Binning is not allowed in Apg::AdcSpeed_Video mode or for quad readout ccds.
- Parameters
-
[in] bin Valid range is 1 - GetMaxBinRows()
- Exceptions
-
std::runtime_error
◆ SetRoiNumCols()
| void ApogeeCam::SetRoiNumCols | ( | uint16_t | cols | ) |
Sets the number of imaging ROI columns. The default value is the GetMaxImgCols().
- Parameters
-
[in] cols 1 to GetMaxImgCols() is the valid value range for normal imaging. For imaging the overscan columns maximum is GetMaxImgCols() + GetNumOverscanCols().
- Exceptions
-
std::runtime_error
◆ SetRoiNumRows()
| void ApogeeCam::SetRoiNumRows | ( | uint16_t | rows | ) |
Sets the number of imaging ROI rows The default value is the GetMaxImgRows().
- Parameters
-
[in] rows number of rows, 1 to GetMaxImgRows() is the valid value range.
- Exceptions
-
std::runtime_error
◆ SetRoiStartCol()
| void ApogeeCam::SetRoiStartCol | ( | uint16_t | col | ) |
Sets the starting column for the imaging ROI. 0 is the default value.
- Parameters
-
[in] col 0 to GetMaxImgCols() -1 is the valid value range.
- Exceptions
-
std::runtime_error
◆ SetRoiStartRow()
| void ApogeeCam::SetRoiStartRow | ( | uint16_t | row | ) |
Sets the starting row for the imaging ROI. 0 is the default value.
- Parameters
-
[in] row 0 to GetMaxImgRows() -1 is the valid value range.
- Exceptions
-
std::runtime_error
◆ SetSequenceDelay()
| void ApogeeCam::SetSequenceDelay | ( | double | delay | ) |
Time delay between images of the sequence. Dependent on SetVariableSequenceDelay( bool variable ). The default value of this variable after initialization is 327us.
- Parameters
-
[in] delay The valid range is from 327us to 21.42s.
- Exceptions
-
std::runtime_error
◆ SetShutterAmpCtrl()
| void ApogeeCam::SetShutterAmpCtrl | ( | bool | TurnOn | ) |
Enables/disables the CCD voltage while the shutter strobe is high. The default value of this variable after initialization is FALSE.
- Parameters
-
[in] TurnOn true disables the CCD voltage, false enables voltage
- Exceptions
-
std::runtime_error
◆ SetShutterCloseDelay()
| void ApogeeCam::SetShutterCloseDelay | ( | double | delay | ) |
Sets the amount of time between the close of the shutter and the beginning of the sensor readout. The default value of this variable after initialization is camera dependent. NOTE: This is a specialized property designed for unique experiments. Applications and users will not normally need to modify this variable from the default value.
- Parameters
-
[in] delay
- Exceptions
-
std::runtime_error
◆ SetShutterState()
| void ApogeeCam::SetShutterState | ( | Apg::ShutterState | state | ) |
Set the shutter state.
- Parameters
-
[in] state Desired shutter state
- Exceptions
-
std::runtime_error
◆ SetShutterStrobePeriod()
| void ApogeeCam::SetShutterStrobePeriod | ( | double | period | ) |
Sets the period of the shutter strobe appearing on a pin at the experiment interface. The default value of this variable after initialization is 0.001s (1ms).
- Parameters
-
[in] period The minimum valid value is 45ns and maximum value is 2.6ms (40ns/bit resolution).
- Exceptions
-
std::runtime_error
◆ SetShutterStrobePosition()
| void ApogeeCam::SetShutterStrobePosition | ( | double | position | ) |
Sets the delay from the time the exposure begins to the time the rising edge of the shutter strobe period appears on a pin at the experiment interface. The default value of this variable after initialization is 0.001s (1ms).
- Parameters
-
[in] position The minimum valid value is 3.31us and the maximum value is 167ms (2.56us/bit resolution).
- Exceptions
-
std::runtime_error
◆ SetTdiBinningRows()
| void ApogeeCam::SetTdiBinningRows | ( | uint16_t | bin | ) |
The row (vertical) binning of a TDI image. The default value for this variable after initialization is 1. Modifying this property also changes the value of the SetKineticsSectionHeight( uint16_t height ) property.
- Parameters
-
[in] bin The valid range for this variable is between 1 and the corresponding value of GetMaxBinRows().
- Exceptions
-
std::runtime_error
◆ SetTdiRate()
| void ApogeeCam::SetTdiRate | ( | double | TdiRate | ) |
Rate between TDI rows. The default value for this variable after initialization is 0.100s. Modifying this property also changes the value of the SetKineticsShiftInterval( double interval ) property.
- Parameters
-
[in] TdiRate Range is from 5.12us to 336ms.
- Exceptions
-
std::runtime_error
◆ SetTdiRows()
| void ApogeeCam::SetTdiRows | ( | uint16_t | TdiRows | ) |
Total number of rows in the TDI image. The default value for this variable after initialization is 1. Modifying this property also changes the value of the SetKineticsSections( uint16_t sections ) property.
- Parameters
-
[in] TdiRows Range is between 1 and 65535.
- Exceptions
-
std::runtime_error
◆ SetVariableSequenceDelay()
| void ApogeeCam::SetVariableSequenceDelay | ( | bool | variable | ) |
Tells the camera when it should apply the sequeuce delay during an image sequence. The default value of this variable after initialization is true.
- Parameters
-
[in] variable If true, the delay is applied between the end of last readout to beginning of next exposure. If false, delay is a constant time interval from the beginning of the last exposure to the beginning of the next exposure.
- Exceptions
-
std::runtime_error
◆ StartExposure()
|
pure virtual |
This method begins the imaging process. The type of exposure taken is depends on various state variables including the CameraMode and TriggerMode.
- Parameters
-
[in] Duration Length of the exposure(s), in seconds. The valid range for this parameter is GetMinExposureTime() to GetMaxExposureTime(). [in] Determines whether the exposure is a light or dark/bias frame. A light frame requires this parameter to be set to true, while a dark frame requires this parameter to be false.
- Exceptions
-
std::runtime_error
◆ StopExposure()
|
pure virtual |
This method halts an in progress exposure. If this method is called and there is no exposure in progress a std::runtime_error exception is thrown.
- Parameters
-
[in] Digitize If set to true, then the application must call GetImage() to retrieve the image data and to put the camera in a good state for the next exposure. If set to false, then an application should not call GetImage().
- Exceptions
-
std::runtime_error
Implemented in Alta, and CamGen2Base.
◆ StopExposureModeNorm()
|
protected |
◆ SupsendCooler()
|
protected |
◆ UpdateAlta()
| void ApogeeCam::UpdateAlta | ( | const std::string | FilenameCamCon, |
| const std::string | FilenameBufCon, | ||
| const std::string | FilenameFx2, | ||
| const std::string | FilenameGpifCamCon, | ||
| const std::string | FilenameGpifBufCon, | ||
| const std::string | FilenameGpifFifo | ||
| ) |
◆ UpdateAscentOrAltaF()
| void ApogeeCam::UpdateAscentOrAltaF | ( | const std::string | FilenameFpga, |
| const std::string | FilenameFx2, | ||
| const std::string | FilenameDescriptor | ||
| ) |
◆ UpdateAspen()
| void ApogeeCam::UpdateAspen | ( | const std::string | FilenameFpga, |
| const std::string | FilenameFx2, | ||
| const std::string | FilenameDescriptor, | ||
| const std::string | FilenameWebPage, | ||
| const std::string | FilenameWebServer, | ||
| const std::string | FilenameWebCfg | ||
| ) |
◆ VerifyFrmwrRev()
|
protected |
◆ WaitForCoolerSuspendBit()
◆ WriteReg()
- Parameters
-
[in] reg Register [in] value Value to write
- Exceptions
-
std::runtime_error
◆ WriteStrDatabase()
| void ApogeeCam::WriteStrDatabase | ( | CamInfo::StrDb & | info | ) |
Member Data Documentation
◆ m_CamCfgData
|
protected |
◆ m_CameraConsts
|
protected |
◆ m_CamIo
|
protected |
◆ m_CamMode
|
protected |
◆ m_CcdAcqSettings
|
protected |
◆ m_ExposureTimer
|
protected |
◆ m_fileName
|
protected |
◆ m_FirmwareVersion
|
protected |
◆ m_Id
|
protected |
◆ m_ImageInProgress
|
protected |
◆ m_IsConnected
|
protected |
◆ m_IsInitialized
|
protected |
◆ m_IsPreFlashOn
|
protected |
◆ m_LastExposureTime
|
protected |
◆ m_NumImgsDownloaded
|
protected |
◆ m_PlatformType
|
protected |
The documentation for this class was generated from the following files:
- ln/3rdparty/src/indilib/indi-1.7.4/3rdparty/libapogee/ApogeeCam.h
- ln/3rdparty/src/indilib/indi-1.7.4/3rdparty/libapogee/ApogeeCam.cpp
